
红外热像边界层转捩探测的飞行试验应用研究
2019-03-19 06:21:56红州
空气动力学学报 2019年1期
, , , 红州,
(1. 中国航空工业空气动力研究院 高速高雷诺数航空科技重点实验室, 辽宁 沈阳 110034;2. 中国飞行试验研究院 中航工业飞行仿真航空科技重点实验室, 陕西 西安 710089)
0 引 言
对于民用飞机来说,经济性是一项重要指标,减小巡航阻力更是提升民机经济性的有效途径。层流减阻是当前民用飞机设计与研制的热点话题之一。民用飞机的阻力一般由压差阻力、摩擦阻力、升致阻力构成,通过优化外形等设计往往可使压差阻力和升致阻力降到较低水平,在巡航状态下摩擦阻力最高可占总阻力的一半。由于湍流边界层的摩擦阻力远大于层流边界层,通过扩大机翼表面的层流范围,可以有效减小机翼摩擦阻力,进而提供可观的减阻效果。
由于通过层流机翼技术减阻能够获得可观的经济效益,国外各民机研制机构很早就开始在层流减阻技术研究中持续投入资助。以Beoing公司为例,从20世纪90年代开始,Beoing与NASA联合开展多个研究项目[1],在风洞和飞行条件下开展了大量的层流机翼、混合层流控制机翼试验和数值模拟研究,其中大部分研究基于飞行试验。
随着我国大型民用飞机研制项目的陆续开展和推进,国内对层流设计以及减阻方法的关注程度也日益增加,各主机厂所、研究机构以及主要高校都开始发展层流机翼/短舱设计、以及层流控制方法研究。但是由于以往的研究需求相对较少、以及风洞设备能力限制等因素,目前来看,国内在高速风洞以及飞行条件下的层流测试技术存在明显的不足,缺乏对层流减阻技术的有效验证手段。
此外,相对于飞行试验来说,风洞试验存在着雷诺数不足、湍流度不够低(跨声速条件下,连续式高速风洞湍流度的典型值为0.1%~0.3%[2],高空大气的典型测量值为0.023%~0.047%[3])等缺点。由于高速风洞尺寸有限,试验雷诺数达不到飞行条件水平,在跨声速状态下,风洞试验中得到的层流机翼转捩探测结果往往不具有足够的说服力。开展层流验证机飞行试验,特别是层流翼套飞行试验技术,是当前解决层流减阻技术验证的有效手段。
评估层流机翼最重要的指标就是转捩位置,因此转捩探测是层流测试飞行试验中是必不可少的手段。目前已有大量的非接触式边界层转捩测量技术投入工程应用,主要包括油膜干涉法、温度敏感涂层(TSP)、红外热像技术(IRT)等。油膜干涉法曾在风洞试验中用于全尺寸倾转旋翼测量[4]以及高速螺旋桨叶片测量[5]。TSP技术也应用于高速旋转螺旋桨叶片测量[6]。
红外技术最早于20世纪60至70年代开始应用,由于当时红外相机的灵敏度相对较差,主要用于再入飞行器的高温高焓气动实验[7]。随着红外相机技术的发展,IRT推广至对流换热测量[8],以及各类风洞实验中[9-10]。TSP与红外转捩探测的基本原理都是通过测量机翼表面温度,利用转捩前后的温差判定转捩位置。红外技术的优势在于其较高的温度分辨力(约为0.025 K),而TSP技术的温度分辨力大约是0.1 K[11]。因此,一般情况下更多使用红外技术进行转捩探测。
飞行试验转捩探测方面,1988年,Horstmann[12]针对层流翼套,利用LFU-205飞机作为测试平台,首次在飞行试验中开展红外捩探测技术应用研究,将测试用的红外相机放置在机舱内部,通过红外窗口观测机翼上表面。表1给出了近30年来已开展过的飞行试验红外转捩探测技术应用情况的不完全统计,整理了飞行高度、雷诺数、相机布局方法等信息。
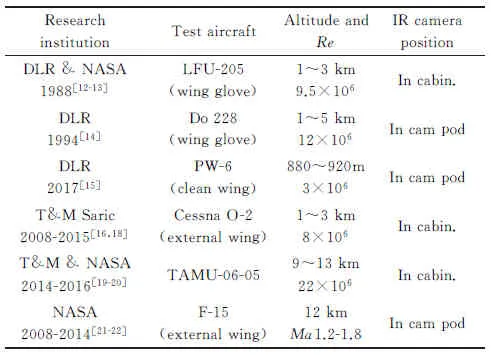
表1 飞行试验红外转捩探测技术研究和应用情况Table 1 Statistics of IR technique used in flight tests for boundary layer transition detection
可以看出,目前已在小型、中型尺寸飞机开展过多次红外转捩测量工作,最高雷诺数达到2千万量级。但值得注意的是,我国目前尚无飞行条件下的转捩测量经验,因此急需开展飞行试验边界层转捩探测技术的应用研究。
本文针对层流翼套飞行试验,开展飞行条件下的红外热像转捩探测技术应用研究。研究目的是利用飞行演示试验,验证红外技术的飞行环境适用性,验证转捩判定方法的可靠性。为下一阶段针对层流翼套以及层流机翼的飞行试验转捩探测奠定基础。
本次试验飞行海拔高度从5 km至7 km,马赫数从0.5至0.65,对应的弦长雷诺数约为1.5×107。
1 转捩探测方案与地面测试
1.1 红外转捩探测原理简介
简言之,红外相机测量机翼表面温度分布,利用层流与湍流的换热系数差别,根据转捩前后换热差别形成的表面温差判定边界层转捩位置。
图1给出了红外转捩探测原理示意,其中上方两个分别为气流温度高于模型(左)和气流温度低于模型(右)表面情况下获取的红外热图,两张热图中的红色直线处提取当地剖面的温度分布曲线,分别在下方对应位置显示。由于湍流边界层的对流换热系数远大于层流,当气流与机翼之间存在温差时,气流与机翼表面之间将进行对流换热,湍流区域的机翼表面温度将更快地接近气流温度。因此,在转捩探测时,将出现图1中的两种情况:当气流温度高于模型表面初始温度时,模型表面的转捩和湍流区温度相对较快地升高,在转捩区形成正向温度梯度;当气流温度低于模型表面初始温度时,模型表面的转捩和湍流区温度相对较快地降低,在转捩区形成负向温度梯度。
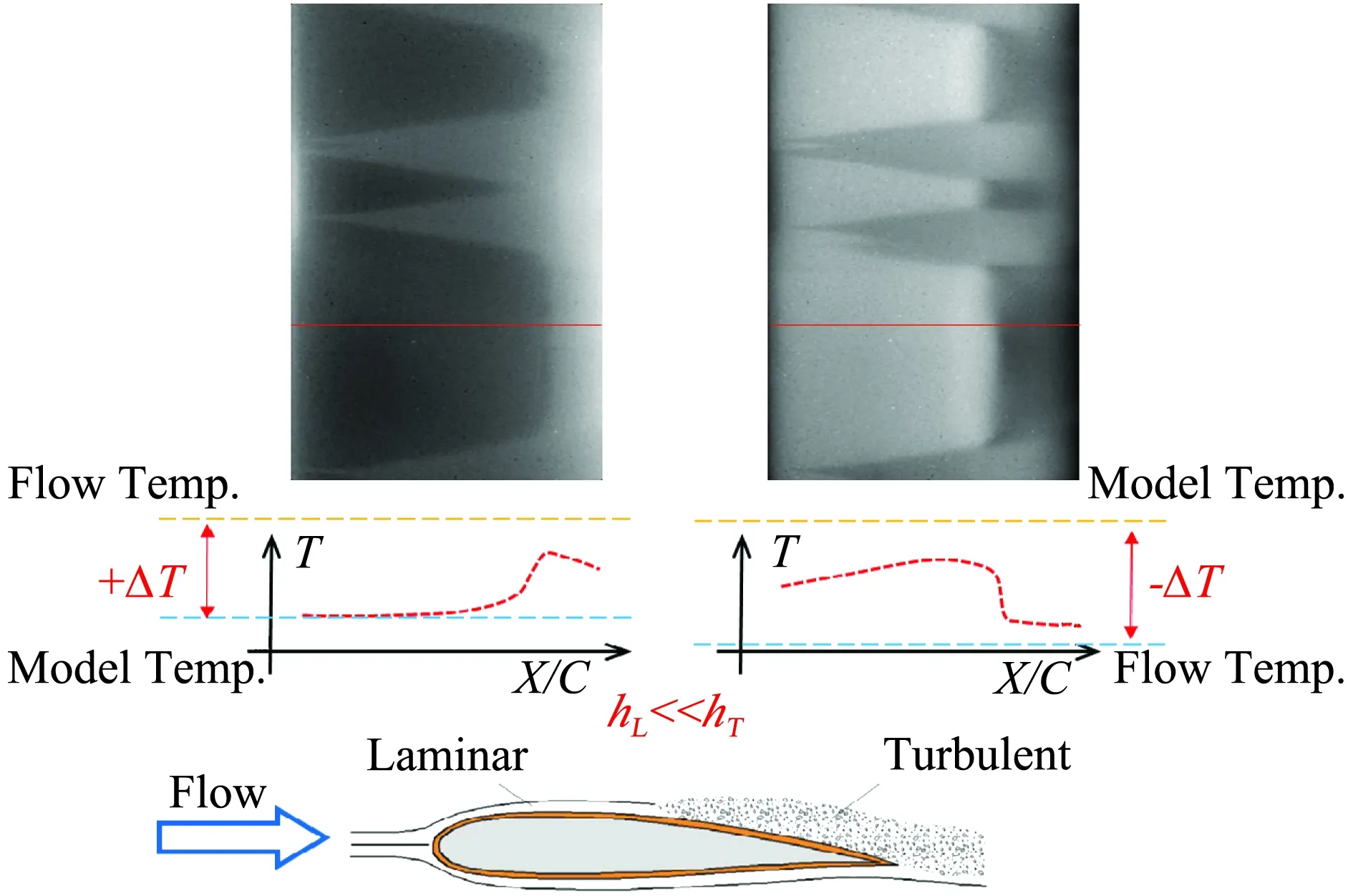
图1 红外转捩探测技术原理示意图Fig.1 Principle diagram of the transition detection using IR thermography
基于上述分析,利用红外技术进行边界层转捩探测,必须满足两个要素,分别为:
(1) 机翼表面具有较高红外发射率,以确保红外测温结果具有较高的可靠性;
(2) 来流与机翼表面之间存在温差,以产生转捩前后的温差。
1.2 飞行环境条件对红外测试的影响分析
利用红外技术在飞行条件下进行转捩探测,要想获得理想的红外热图以及探测结果,必须满足1.1节中提到的关键因素。因此,有必要首先分析飞行环境条件对红外测试的影响特性,进而有针对性的提出测试方案。
对于高空飞行来说,本研究针对的飞行高度范围是5 km~7 km,大气温度范围是-30 ℃~0 ℃,经过长时间飞行,如果无外部热源,蒙皮与大气之间逐渐换热平衡,除驻点外大面积的蒙皮表面温度接近恢复温度,近似与大气温度相同。直接进行红外测温,很难在热图中分辨转捩位置。因此需要对被测区域蒙皮进行加热,以提供机翼表面于大气之间的温差,而且较高的目标温度可提高红外热图信噪比,可提高红外测试结果的可靠性。
在低空大气中悬浮着灰尘、昆虫等颗粒污染物,飞机在起飞及降落过程中机翼前缘表面会随机地沾染这些颗粒物,进而诱发湍流楔,对转捩探测结果造成干扰,本文将通过几个架次飞行对空气悬浮污染物影响特性进行分析,同时发展可靠的转捩位置判定方法,消除由于湍流楔等产生的干扰。
此外,在某些测试角度下,存在太阳辐射,机翼表面反射处的强烈太阳倒影,有可能干扰测量结果,因此应当考虑太阳辐射干扰问题,在设计飞行试验中选择合适的飞行方向,避免被测表面区域内出现太阳倒影。
同时,由于太阳辐射对蒙皮具有辐射加热的效果,本研究中也将分析太阳辐射加热对转捩探测的影响特性。
1.3 转捩探测方案
针对飞行条件,对红外转捩探测方案进行设计,包括:红外相机观测角度及视场;机翼测试区蒙皮表面处理;蒙皮加热。
(1) 红外相机观测角度及视场。根据已有的红外测试结论,使用红外相机对蒙皮表面进行测量时,相机光轴与蒙皮法线之间的夹角(观测角)越大,蒙皮的定向红外发射率越低,将不利于红外测温。Astarita[23]的测试结果表明,一般观测角在0°~60°之间时,定向发射率几乎不变,而当观测角超过60°后表面定向发射率迅速下降。因此观测角度尽可能不超过60°。
因此,针对民用飞机,将红外相机安装固定在机舱内部(图2),将舷窗替换为Ge窗口,可实现红外观测,通过调整相机观测角度和镜头,获得合适的机翼表面观测视场。
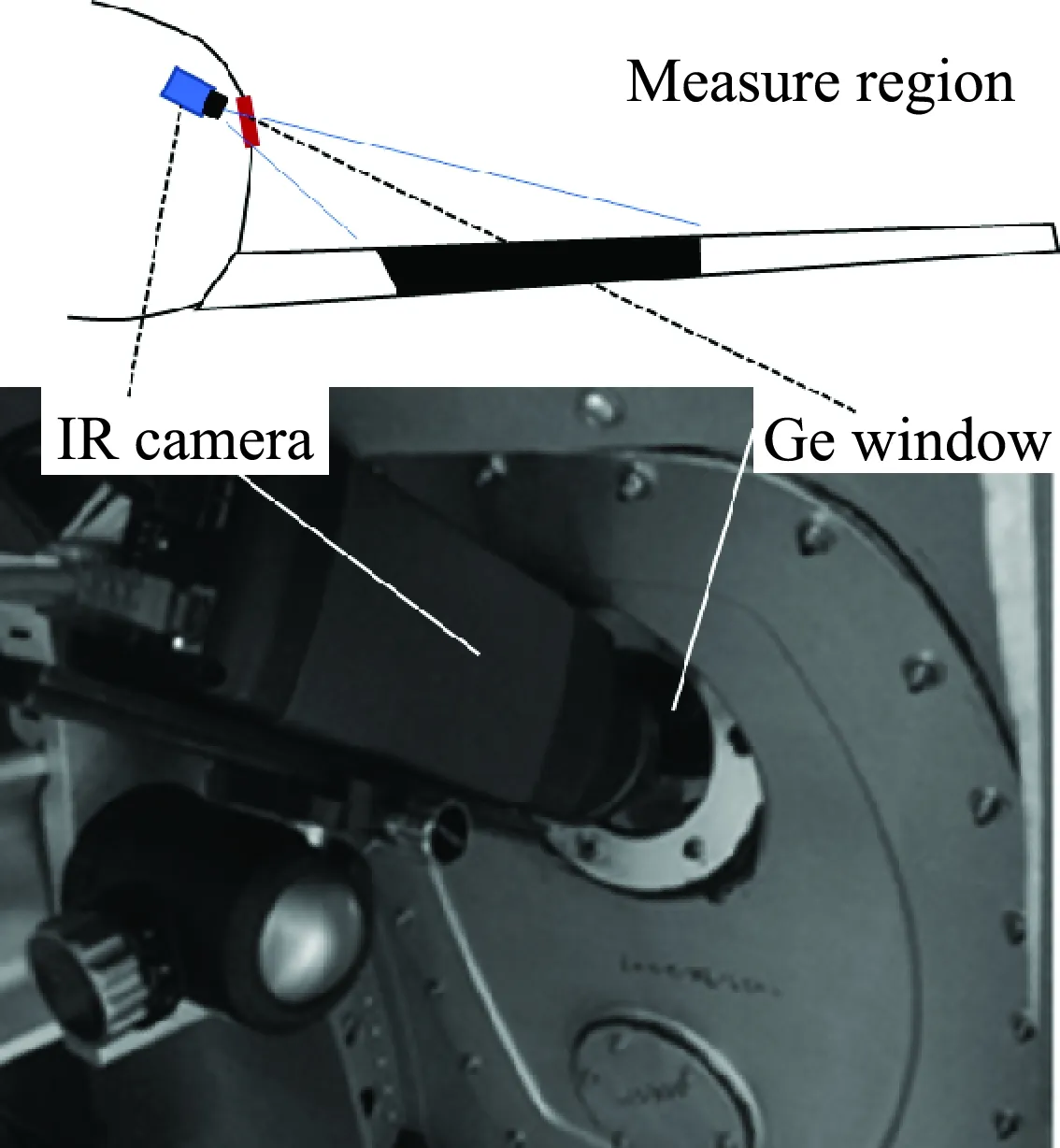
图2 机舱内红外相机安装照片Fig.2 The photo of camera mounted in the cabin
(2) 机翼测试区域蒙皮表面处理方法。为提高红外测量蒙皮表面温度的准确性,关键在于被测蒙皮表面具有较高的红外发射率。
黑漆具有较高的发射率,在机翼表面喷涂黑漆是一种简单有效的解决方案。在喷涂黑漆后,对涂层表面进行抛光处理即可。
(3) 蒙皮加热方案。目前,可采取两种蒙皮加热方式:一是在蒙皮内部布置电加热膜,供应支流电源对其加热;二是利用机翼除冰系统的热气源对蒙皮进行加热。
本研究将利用机翼除冰系统热源对蒙皮进行加热,该系统在飞行过程中可随时开启或关闭,使用方便,而且不需要对机翼进行改动。
1.4 地面测试
为了确保方案可行,在地面对上述实施方案进行了测试验证。
以某民机为试验平台,将其机翼对应处的悬窗更换为专用的Ge窗口,并在机舱内部架设长波红外相机。红外相机像素分辨率640×480,镜头焦距为f=24 mm,视场角范围24°×22°。利用三维数模分析,红外相机与被测区域表面法线的观测夹角为40°(靠近翼根处)~60°(远离翼根处),满足使用需求。
地面测试结果如图3所示,从图中可以看出红外观测视场范围可覆盖机翼被测区域,而且窗口无遮挡。
图3(a)中,由于机翼表面原始涂层经过精细抛光,原始涂层材料未知,可以在其表面热图中看到对侧墙壁和窗等物体的投影反射,这说明该机翼表面红外发射率相对较低,不利于红外观测,必须对其进行处理。

(a) 原始机翼表面 (b)表面局部喷涂黑漆
因此,在机翼表面局部喷涂了黑漆,图3(b)中,箭头指示处局部进行喷漆,带有黑漆的部位没有窗户的投影,与左图对比鲜明,可见喷涂黑漆后的表面发射率明显提高。
2 飞行演示试验方案设计
为了验证飞行试验红外转捩探测方案,开展了飞行演示试验,下文对方案设计进行介绍。
2.1 试验平台与测试对象
飞行试验使用了某小型民机作为验证平台,该机型最大飞行Ma数为0.75,最高巡航高度为10 km。尽管该飞机的机翼不是层流构型,转捩位置相对靠前,但仍然可以作为转捩探测技术验证的测量对象。
被测区域在左侧机翼上表面,包含展向30%~ 50%,弦向2%~50%的区域。
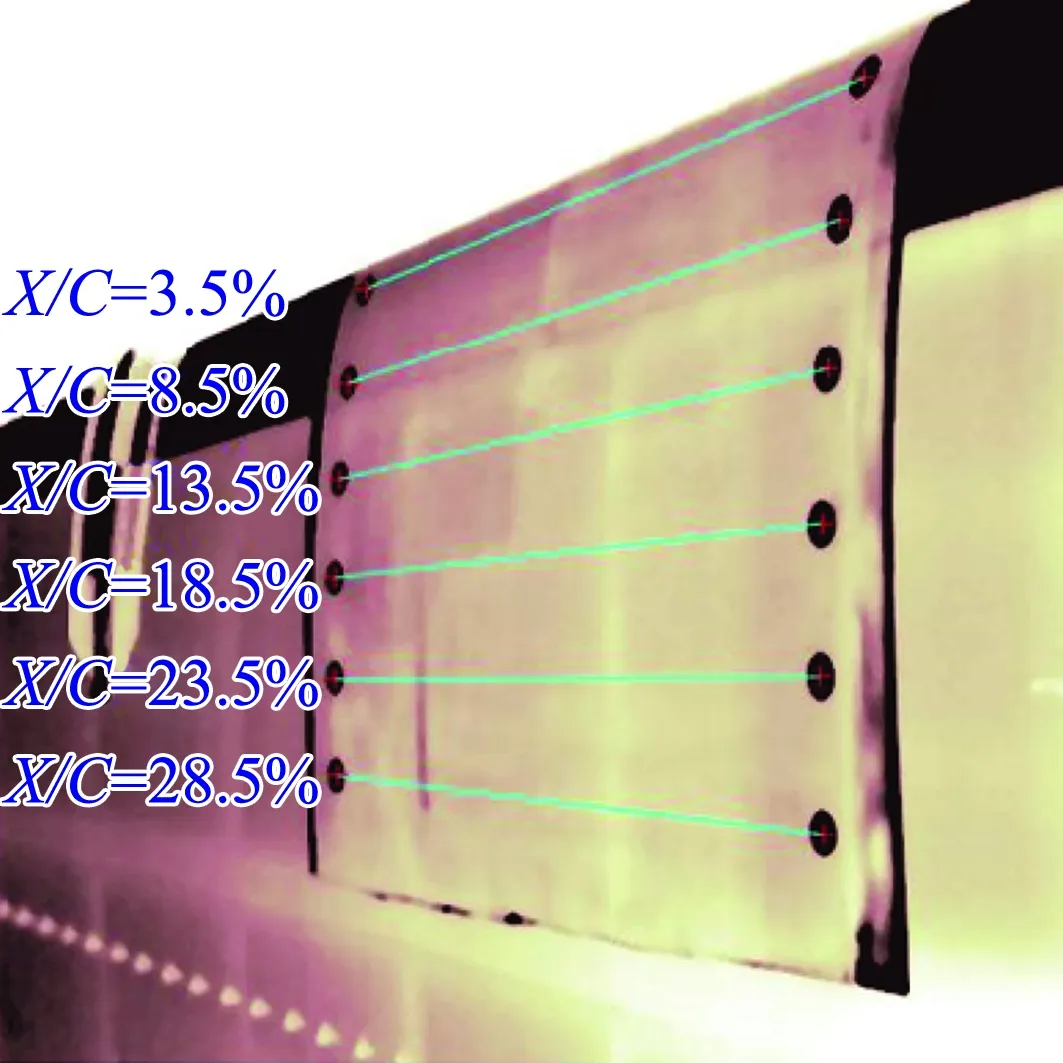
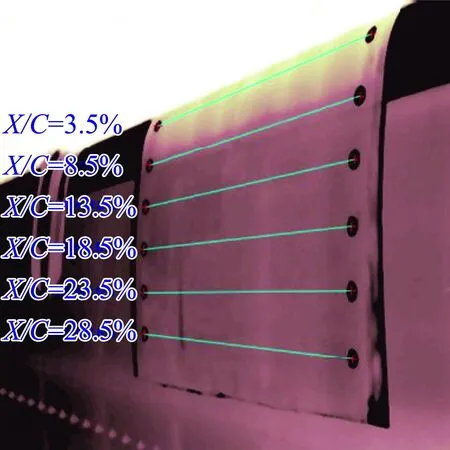
如图4所示,在试验前将被测区域喷涂黑漆,同时沿弦向在被测区域展向两侧布置多个标记点,用于图像修正与参考,标记点材料为铝箔。
试验状态见表2。

图4 试验机翼及其被测区域Fig.4 The photo of flight test wing
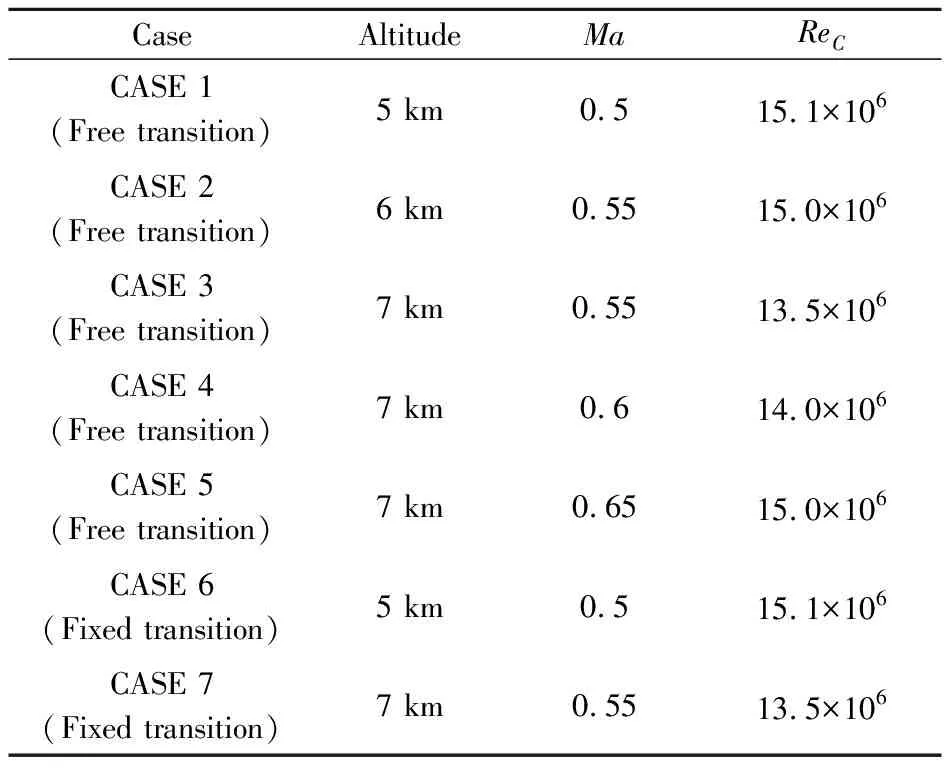
CaseAltitudeMaReCCASE 1(Free transition)5 km0.515.1×106CASE 2(Free transition)6 km0.5515.0×106CASE 3(Free transition)7 km0.5513.5×106CASE 4(Free transition)7 km0.614.0×106CASE 5(Free transition)7 km0.6515.0×106CASE 6(Fixed transition)5 km0.515.1×106CASE 7(Fixed transition)7 km0.5513.5×106
2.2 转捩判定数据处理方法
实验人员在飞行过程中,对红外相机进行软件触发采集,热图直接存储至电脑中。红外相机软件时钟与GPS时钟对应,同步记录飞机姿态、大气参数等飞行数据。
为获得可靠的转捩判定结果,提出了基于图像处理的自动转捩位置识别处理流程。
图5给出了红外热图处理流程,大致分为4个过程:首先获得原始热图;自动识别机翼表面的圆形标记点,利用仿射变换将被测区域红外热图转换为矩形形状的热图,横纵分别代表展长和弦长方向,与翼面的无量纲坐标一一对应;随后沿着流动方向计算热图温度梯度场;提取各展向剖面的温度梯度曲线,根据温度梯度极值判定转捩位置。
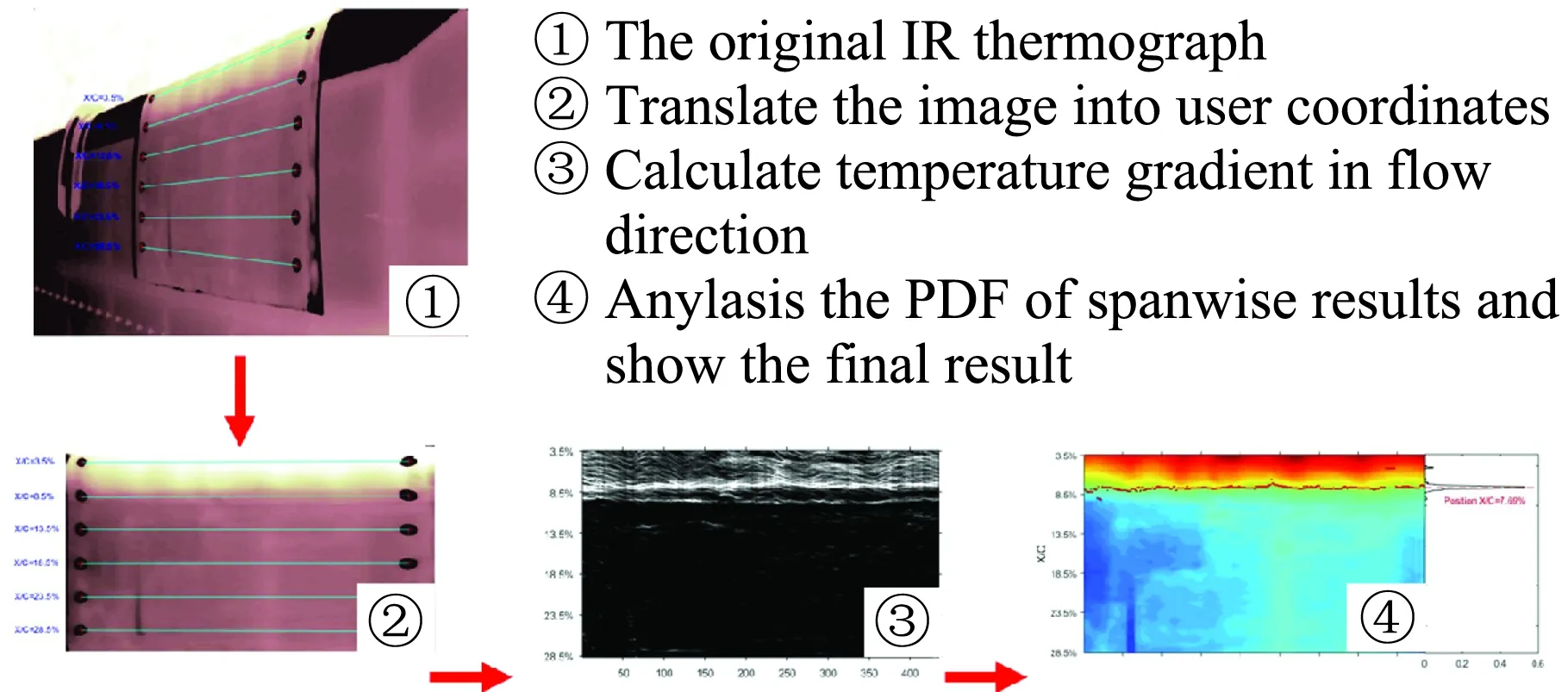
图5 数据处理流程示意图Fig.5 The diagram of IR image processing method
为了提高转捩位置判定结果的可靠性,消除湍流楔等干扰因素导致的结果误判,对所有剖面判定得到的转捩位置进行统计,给出转捩位置沿着展向分布的概率密度曲线,根据最大概率密度的指示,最终确定该状态下机翼表面的转捩位置。
2.3 高空环境干扰测试方案
针对太阳辐射干扰特性,设计了一种测试方案。如图6所示,飞机沿东西方向往复飞行,由于太阳入射角是倾斜的,当飞机自西向东平飞时,机身将太阳光遮挡,左侧机翼被测区域靠近翼根,在阴影区内,不接收太阳辐射;当飞机自东向西平飞时,左侧机翼全部暴露在太阳光照射下,被测区域接收太阳辐射。
根据试验时间(2017年11月)和试验所在地纬度,可估算当地太阳高度角为37°,当自西向东飞行时,太阳位于飞机的右上方位,由机身遮挡产生的阴影区可以覆盖被测区域。这样就可以对比由于太阳辐射产生的影响量。

图6 太阳辐射干扰特性试验方案示意图Fig.6 Test diagram of solar radiation interference characteristics analysis
此外,在飞机转换姿态以及起降过程中,太阳红外镜像与云层都将对红外光路产生较强干扰,飞行过程中,也将全程采集红外热像,并对典型情况进分析。
3 飞行试验测量结果与分析
3.1 蒙皮加热必要性与典型测量结果
(a) without heating
(b) with heating
图7给出了相同飞行工况下,有无蒙皮加热时采集到的热图。从图中可以看出,当无蒙皮加热时,经过一段时间(约10 min)飞行后,蒙皮表面温度趋于平均,较难分辨转捩前后的温度差别;当开启蒙皮加热系统后,明显从图像中区分转捩前后的温差带,此时的热图对于转捩位置探测来说具有较高的信噪比。
通过机翼前缘加热(加热范围X/C=0%~10%),获得了较高质量的红外热图,并利用本文提出的自动转捩位置识别方法处理热图。
图8给出了典型的飞行试验红外原始热图及其处理结果。从图中可以看出原始图像具有较高的信噪比,各展向剖面判定得到的转捩位置分布趋于集中,符合客观规律。因此飞行试验必须对机翼进行加热才能得到高质量红外图像。
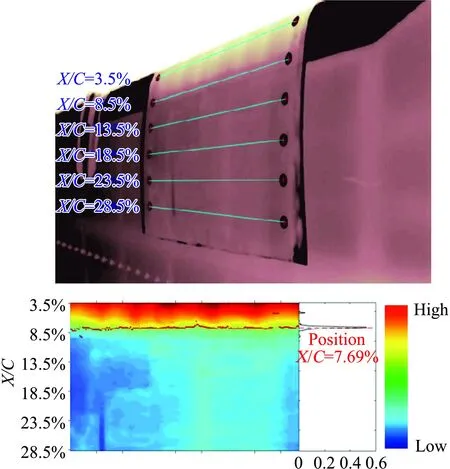
图8 红外测量结果,CASE 3, H=7 km, Ma=0.552, α=0.19°Fig.8 IR result of CASE 3, H=7 km, Ma=0.552, α=0.19°
利用本文提出的转捩判定方法,对所有工况下采集的红外热图进行了处理,表3给出了各工况的转捩位置测量结果。机翼自然转捩位置对应的当地雷诺数为Rex=1.10×106~1.25×106。
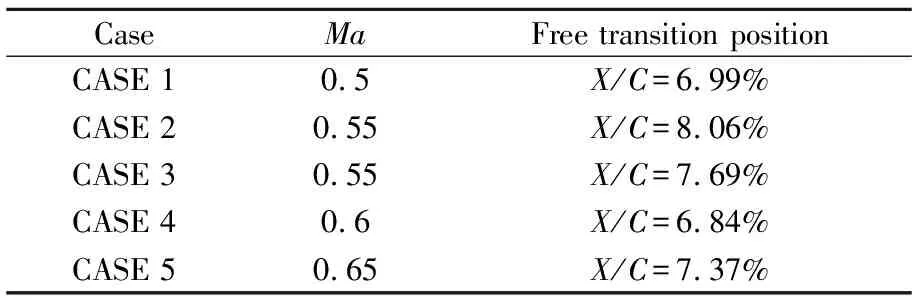
表3 自然转捩位置测量结果Table 3 Results of natural transition position
图9给出了三个典型工况下机翼被测区域转捩位置分布情况,该数据可供转捩预估代码的验证参考使用,详细边界条件见表4,其中T_atm表示大气环境温度,T_w表示机翼表面温度。
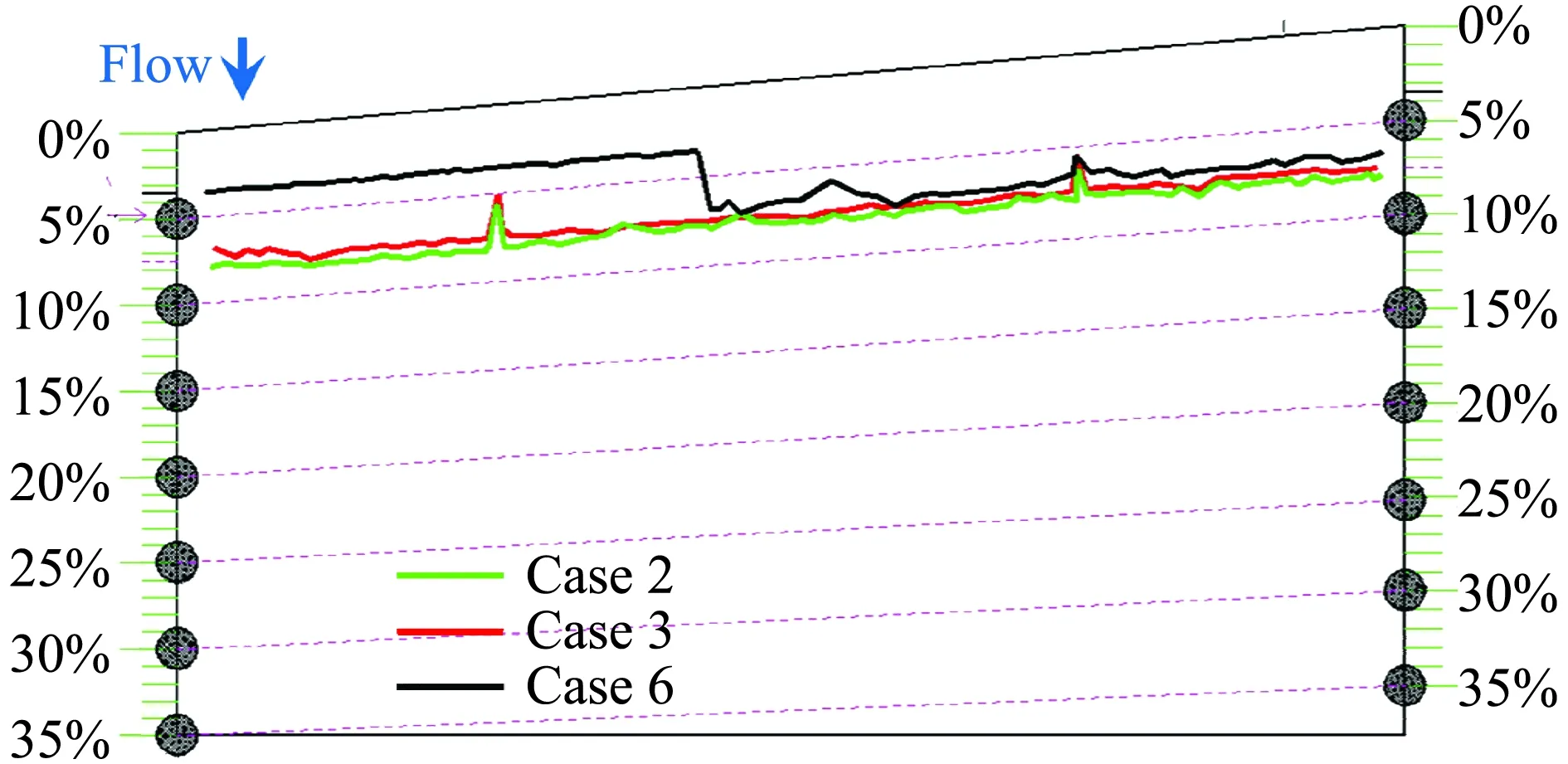
图9 典型状态转捩位置分布,CASE 2/3/6Fig.9 Transition position on the wing of CASE 2/3/6
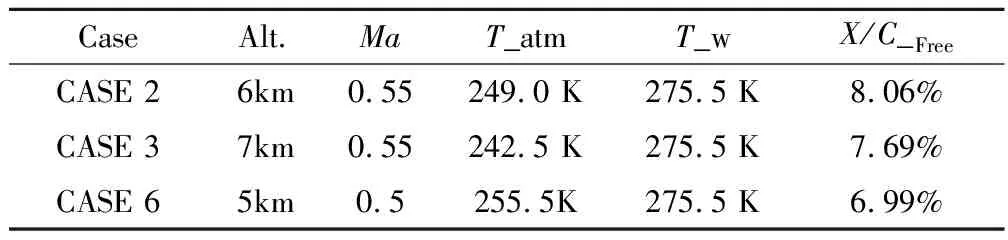
CaseAlt.MaT_atmT_wX/C_FreeCASE 26km0.55249.0 K275.5 K8.06%CASE 37km0.55242.5 K275.5 K7.69%CASE 65km0.5255.5K275.5 K6.99%
3.2 转捩位置探测验证
为了验证红外测量结果的有效性,在自由转捩区布置粗糙元强制转捩,并进行实际飞行观测,通过对比粗糙带位置与测量得到的转捩位置差别,对红外转捩探测结果进行验证。
在弦向3.5%位置布置粗糙元,粗糙元高度0.1 mm,单个粗糙元直径1.2 mm,相邻单元圆心距2.5 mm。粗糙元布置范围包含被测机翼段一半展长,位于远离翼根处。
根据边界层理论以及Braslow[24]的研究结论,诱发边界层在当地转捩所需的粗糙元高度对应的雷诺数Rek应达到600~650。根据试验条件,飞行马赫数为0.5~0.65,当地声速为310~320 m/s,按此参数估算Rek范围时700~800,满足诱发当地转捩的条件,因此可以用于验证红外转捩探测结果的有效性。
图10给出了测量结果,从热图中可以看到粗糙元达到了诱发边界层在当地转捩的效果。
利用本文方法探测,分别得到了自然转捩和固定转捩位置,其中固定转捩测量结果与实际固定转捩位置偏差约为0.2%。
表5给出了固定转捩红外测量结果与粗糙元站位的偏差。首先,依据自由转捩位置测量结果(表中第4列),case6和case7两个工况下的层流区域都足够大,可以用来检验转捩判定位置有效性。在弦向3.5%处布置粗糙元情况下,使用红外热像探测得到的转捩位置偏差分别是0.2%和0.3%,在验证工况点不多的情况下,保守估计,本文方法探测得到的转捩位置偏差不超过弦长0.5%。
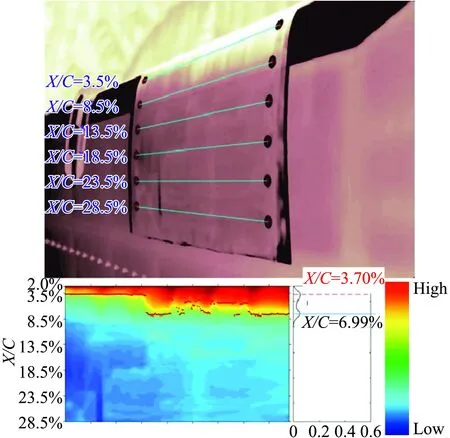
图10 红外测量结果,CASE 6, H=5 km, Ma=0.5, α=0.16°Fig.10 IR result of CASE 6, H=5 km, Ma=0.5, α=0.16°

CaseX/C_FixedErrorX/C_FreeCASE 63.7%0.2%6.99%CASE 73.8%0.3%7.2%
3.3 大气悬浮污染物影响
通过3个架次试验对比,初步分析大气污染物对翼面边界层转捩的影响情况。其中第2个架次飞行前,对前缘进行清理和抛光,在第3个架次飞行前未对前缘进行任何处理。目的是分析起飞后飞机经过低空大气过程中悬浮污染物是否能够影响机翼转捩位置。
图11中给出了第2、3架次飞行试验的红外热图,分别对应工况Case1和Case6。从热图中可以看出,第2架次飞行中,机翼转捩位置沿展向分布是比较均匀统一的,但是在第3个架次飞行中,部分自然转捩区域存在湍流楔(在图中箭头指示处)。说明在第3个架次起飞过程中,机翼前缘沾染了悬浮颗粒物,并由于颗粒物的存在引起了湍流楔。
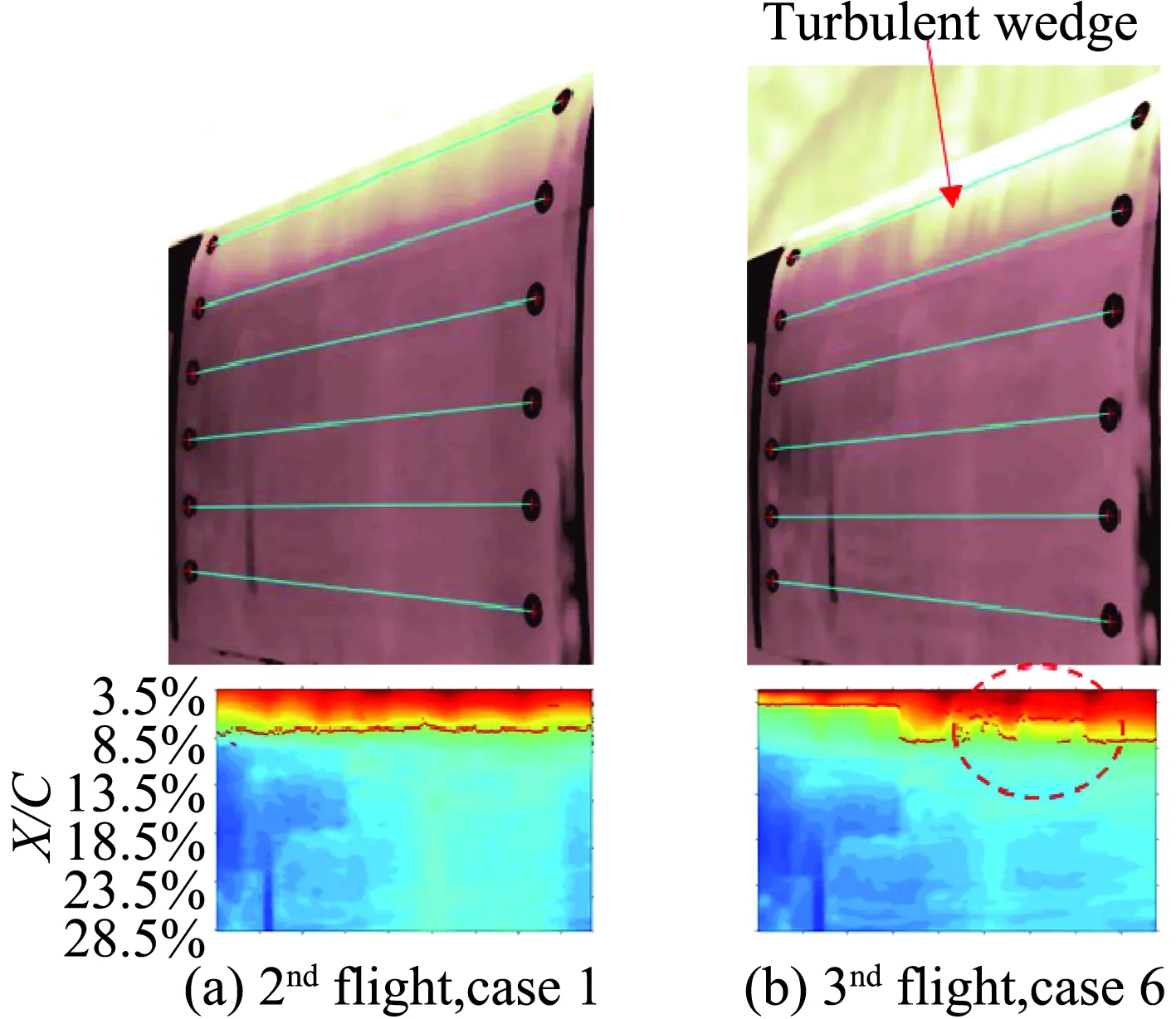
图11 多次飞行转捩情况对比Fig.11 Comparation between IR results of Case1 and Case6
在数据处理中,湍流楔所在区域转捩位置判定结果靠近前缘,将误导最终的转捩位置判定。利用统计分析方法进行转捩位置自动判定,可有效规避湍流楔等因素引起的误判结果,最终给出最可靠的转捩位置判定结果。通过对比Case1和Case6在自然转捩区域的转捩位置判定结果可知,二者相符。
3.4 太阳辐射影响特性
利用机身遮挡,形成有-无太阳光照射的对比状态,图12给出了典型的观测结果。其中,左侧为在非加热状态下,无太阳光照射情况下得到的表面热图,很难分辨转捩位置;右图为非加热状态下,利用太阳光照射得到的表面热图,可以勉强分辨转捩位置。
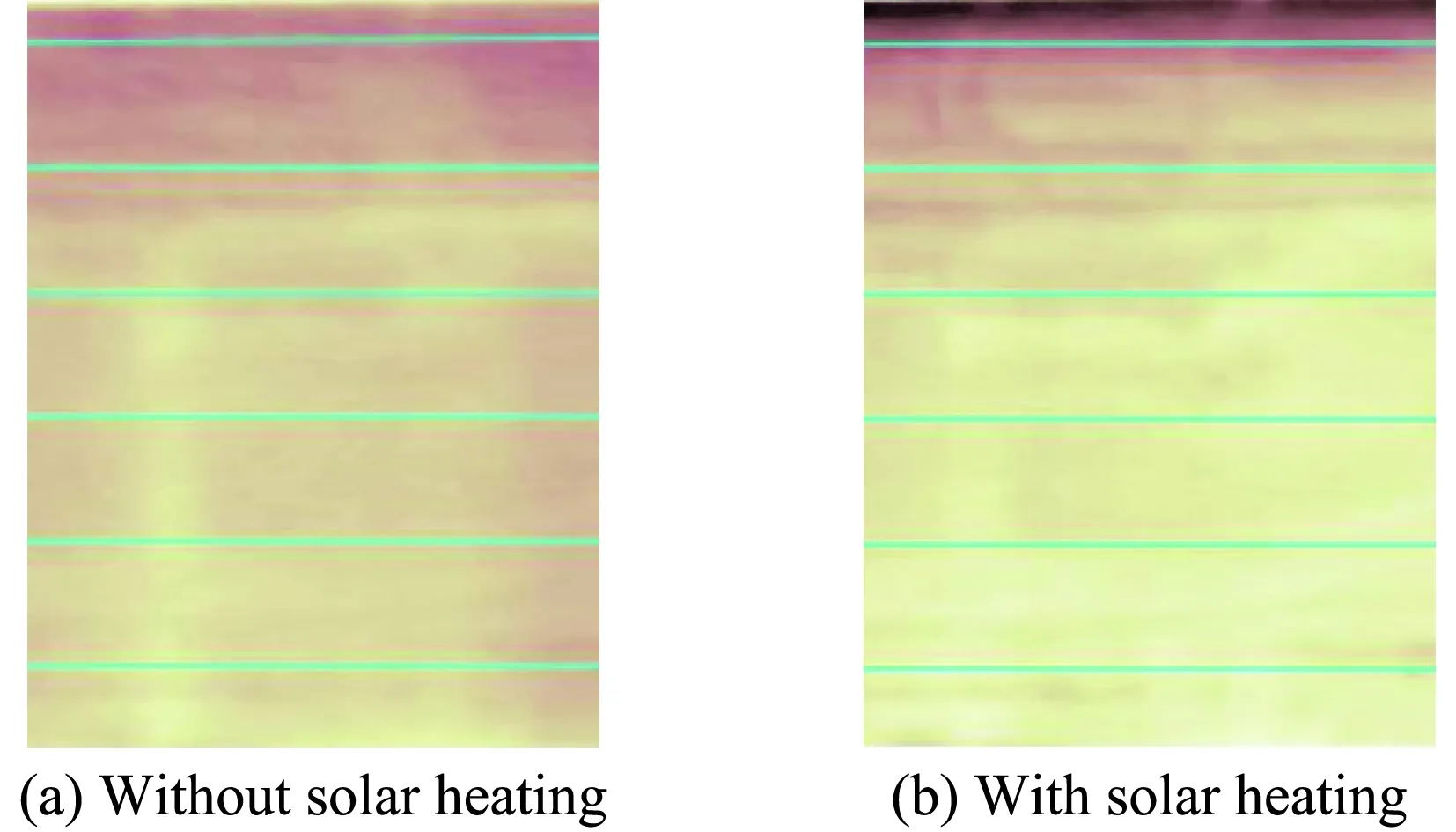
图12 太阳辐射影响对比Fig.12 Comparation between IR images with and without solar heating
尽管借助太阳辐射加热,能够使模型表面在转捩前后形成一定的温差,但是信噪比较低,在数据后处理时各展向剖面的判定结果数据错点过多,导致最终输出的结果存在较大误差。
4 结 论
本文针对层流翼套飞行试验,开展飞行条件下的红外热像转捩探测技术应用研究。对红外技术在飞行条件下应用的环境适应性问题进行了梳理,并提出有效的试验方案。飞行演示验证试验结果与讨论证明了红外热像转捩探测技术的可行性以及可靠性,积累了相关工程应用经验,得到如下结论:
1) 在对蒙皮进行加热的条件下,红外热像技术具有飞行试验转捩探测的环境适用性,应用中同时需考虑红外相机的安装与保护;
2) 一般超过2个架次以后,机翼前缘开始出现污染物,并能够诱发湍流楔,进而减少层流范围,层流机翼设计和应用中必须考虑这一问题;
3) 经过验证,该方法应用简单可靠,在层流翼套以及边界层转捩基础飞行试验研究方面具有一定潜力,可进一步拓展应用于各类主/被动边界层控制技术(如横流转捩的混合层流、离散粗糙元等控制手段)在高雷诺数飞行条件下的验证测试。
本文以常规机翼作为测量对象,完成了红外热像转捩探测方法在飞行试验中的应用验证。并给出了真实飞行条件下的几组典型转捩探测数据,可供转捩预估相关研究参考使用。以此为基础,下一阶段将开展层流翼套的转捩测量应用工作。
致谢:在此,感谢中国飞行试验研究院提供的试飞平台,以及直接或间接为本研究提供帮助支持的各级领导、同事!
猜你喜欢
西北工业大学学报(2023年2期)2023-05-12 12:12:36
客车技术与研究(2023年1期)2023-03-15 04:11:34
防爆电机(2022年5期)2022-11-18 07:40:18
汽车实用技术(2022年9期)2022-05-20 06:00:26
军民两用技术与产品(2021年5期)2021-07-28 05:55:06
广东医科大学学报(2020年4期)2020-08-24 07:11:10
航空世界(2018年12期)2018-07-16 08:34:46
摄影之友(2016年12期)2017-02-27 14:13:20
家庭百事通(2016年10期)2016-10-11 20:13:59
摄影之友(2016年8期)2016-05-14 11:30:04
