
自主水下航行器网络化控制系统事件触发鲁棒控制
2019-03-19 11:41:02王敏
探测与控制学报 2019年1期
王 敏
(西安职业技术学院机电工程系,陕西 西安 710032)
1 引言
自主水下航行器(Autonomous Underwater Vehicle, AUV)主要用于海洋探测、水下搜救等应用环境。AUV 系统包括自动驾驶仪、主推进系统、航向舵机伺服系统、横舵机伺服系统、水声防碰撞系统、水声通信系统、GPS 接收系统、组合导航系统、航行陀螺和水深传感器等。系统采用总线实现部件间的内部互联。然而,上述网络化控制系统中,带宽资源是有限的,因此控制策略的设计除了要考虑控制性能还需要考虑带宽资源的合理分配。
在大多数情况下,AUV都沿预定航迹稳态航行,而此时采用机动时的传感器采样数据发送间隔,就会造成较大的带宽资源浪费,即使是在机动过程当中,纵向、侧向控制回路也不是同时调整的,其采样数据发送间隔也有调节的余地。而事件触发控制是解决上述问题的途径之一。事件触发机制可以使传感器节点在“必要”的时候才触发状态采集信息的发送进而触发控制节点控制律的解算,可以用较少的通信带宽获得可以接受的控制性能。因此,研究事件触发控制框架下,AUV控制律的设计对于优化AUV网络带宽资源是有现实应用意义的。
与基于周期更新的控制策略不同,基于事件触发的控制系统由事件触发条件决定是否有必要进行采样值传输及计算控制律。针对这类方法的研究,目前主要集中在触发机制设计和系统分析与综合方法。事件触发机制的关键在于事件触发的门限值确定,门限过大,触发控制任务的事件越少,可以减轻网络负载,但只能使系统在较大范围内稳定,甚至失去稳定性,门限过小,触发控制任务的事件越多,有可能造成网络数据发送过于频繁的Zeno现象,使网络负载不可调度,最终影响控制性能[1-3]。系统分析与综合方法着重研究不同事件触发机制下保证闭环控制系统稳定的控制策略。文献[4—5]仅考虑资源受限下基于给定事件触发机制的控制策略设计,未考虑事件触发机制的调整对控制性能的影响。文献[6]研究了基于动态误差阈值的事件触发输出反馈控制策略,并讨论了增大系统采样最小传输间隔的方法。文献[7]针对存在网络延迟的线性参数变化系统,将协调设计归结为多胞线性矩阵不等式(Linear Matrix Inequality: LMI)求解问题,提出一种参数依赖的控制和事件触发机制协调设计策略。文献[8]提出了一种Try-Once-Discard带宽调度机制,利用LMIs求解考虑调度策略的H鲁棒控制律,但未考虑系统的事件触发约束条件;文献[9]以状态误差二次型为触发条件,利用LMIs研究控制律、事件触发器和带宽调度策略协调设计问题,试图使误差范数最大的控制回路获得网络访问优先权,但未考虑网络不确定延迟的影响。
上述研究在解决控制与事件触发机制协调设计方面给出了值得借鉴的方法,在保证控制性能的同时降低了资源占用率,但是存在一定不足,且基于飞行器、AUV等网络化控制模型的事件触发控制问题,鲜有报道。本文提出了一种适用于AUV的控制、调度、事件触发机制一体化协调设计方法。利用参数不确定切换系统描述事件触发的有界随机延迟AUV离散时间系统,构造Lyapunov函数并利用LMIs可行性综合设计鲁棒控制律、事件触发机制及带宽调度策略,使AUV侧向、纵向网络化控制保持全局渐进稳定。
2 系统建模
2.1 AUV动力学模型
描述AUV空间一般运动的方程组[10]:
(1)
式(1)中,η=[x,y,z,φ,θ,ψ]T为地球固连的惯性坐标系下航行器的位置及姿态向量,x,y,z,φ,θ,ψ分别表示航行器的纵向、侧向、垂向位置和横滚、俯仰、偏航角度;v=[u,v,w,p,q,r]T为与航行器固连的体坐标系下航行器速度向量,u,v,w,p,q,r分别表示航行器的纵向,侧向、垂向和横滚、俯仰、偏航角速度;JΘ(η)∈6×6为转移AUV体坐标系到惯性坐标系的转移矩阵;M∈6×6为惯性矩阵,C(v)∈6×6为科里奥利力矩阵,D(v)∈6×6为流体阻力矩阵,g(η)∈6×1为静力矩阵。δ为由舵或推进器产生的控制力矩或推力。
方程(1)是时变非线性、高维微分方程组,在实际控制律设计时,一般不直接使用上述方程组。若运动方程组满足如下条件:1)航行轨迹为垂直平面或水平平面内的平面轨迹,如爬潜、直航等;2)直鳍平面为对称面,在纵向运动中不产生侧向力、偏航和横滚力矩;3)控制系统可以很好地抑制横滚,使纵向和侧向运动铰链耦合的横滚扰动能够迅速衰减;4)AUV重心、浮心重合且配重为零浮力;则侧向和纵向运动方程可以独立分解为垂直平面的纵向运动、在水平面内的侧向运动和航行器绕其纵轴的横滚运动,再用小扰动原理, 在一定航速下对其进行线性化。具体过程见文献[10]。
我们得到的用于控制律设计的某型AUV纵向、侧向、横滚运动线性方程记为:
纵向运动:
(2)
横向运动:
(3)
横滚运动:
(4)
上述控制回路中的传感器、执行机构一般分布于AUV的特定位置,由总线与共享控制器互联。其网络结构如图1所示。系统纵向、横向、横滚控制回路={Pi,i=1,2,3},控制回路i中,分布式传感器单元以周期hi采集AUV姿态、航速等信息。事件发生器σi(k),i=1,2,3用于判断k×hi时刻,控制回路i传感器采集的数据是否有必要通过网络传输进而触发控制律计算并传输更新的控制指令至相应的执行机构。调度器Δ(k)用于仲裁k×hi时刻存在多个节点同时申请访问网络时,能够最先获得访问权限的节点。自动驾驶仪被多回路共享,用于计算控制律。τsc,τca分别表示敏感单元到自动驾驶仪,自动驾驶仪到执行机构的网络传输延迟。
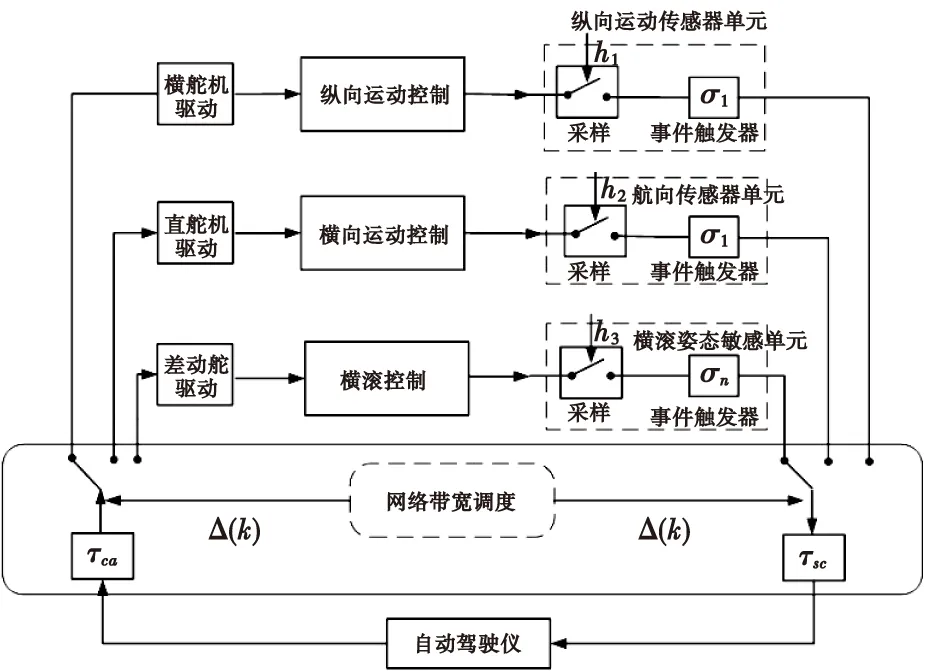
图1 网络控制系统结构Fig.1 Structure of network control system
2.2 被控系统离散时间模型
为表述方便,式(2)—式(4)所示的AUV纵向、横向、横滚运动方程统一表示为式(5)所示的连续时间线性时不变系统,考虑图1中的网络延迟τ(t),系统可由如下方程描述:
(5)
式(5)中,τ(t)=τsa(t)+τca(t) 是随机延迟,且不大于系统采样周期(该假设条件一般可以由调度策略如RM、EDF保证)。
令h表示控制回路采样周期,若tk=k×h时刻触发控制律解算则:
(6)
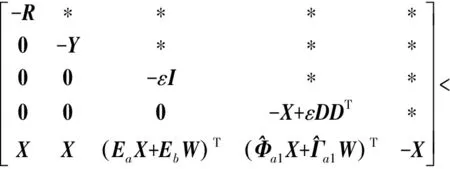
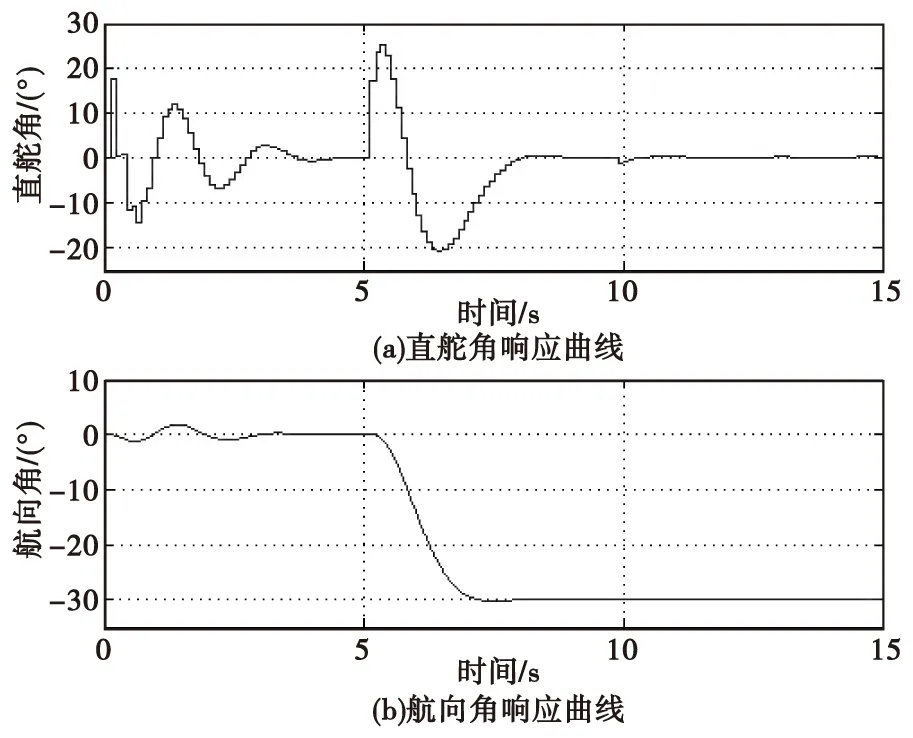
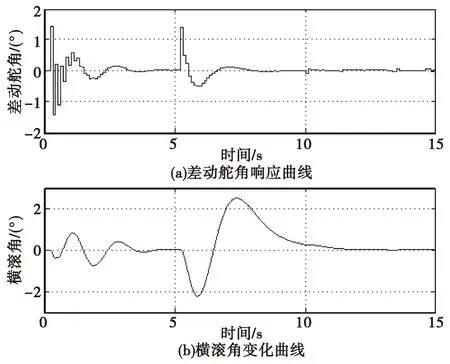
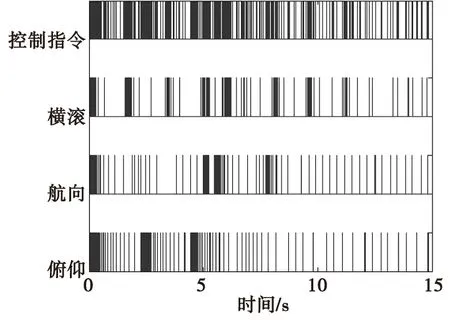
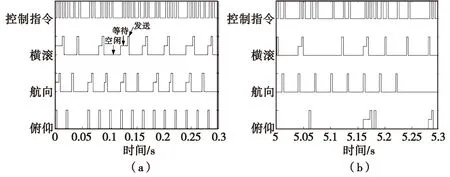
式(6)中,tk≤t 若tk时刻不触发控制律解算,则控制输入保持一拍,即 δ(t-τ(t))=δ(tk-1)tk≤t (7) 根据方程(6)对方程(5)进行离散化: x(k+1)=Φ(h)x(k)+Γ0(h,τk)u(k)+ (8) (9) 式(9)中,I为合适维数的单位阵。 类似地,根据方程(7)离散化(5), 可得: (10) 由于τk∈[0,h]是不确定的,为方便鲁棒控制器设计,对其进行如下变换[8]: Γ0(h,τk),Γ1(h,τk)可以被写为: (11) (12) 将式(11)、式(12)代入式(9),则Φa1,Γa1可以重写为: 显然,FT(τk)F(τk)≤I。 于是,方程(4)可以被重写为: (13) 采用如下二次型触发条件, (14) 上述条件的物理意义是,tk时刻AUV状态误差的加权欧几里得范数相对于tk-1时刻是增大的,控制性能变差,需要向自动驾驶仪传送当前状态测量值并更新控制律,以使系统跟随设定值。 当AUV网络中有多个控制回路满足式(14)所示的触发条件时,需要仲裁当前时刻获得网络访问权限的回路。我们采用如式(15)所示的动态调度策略,该策略使单位时间内控制性能最坏的控制回路获得总线访问权限。 (15) 式(15)中,hi,σi(k)分别表示控制回路i的采样周期以及如式(14)所示的状态误差加权欧几里得范数。特别地,Δ(k)=0表示当前时刻没有控制回路需要发送数据。 在式(14)所示的事件触发条件下,离散系统式(9)、式(10)所示用如下参数不确定切换系统表示: (16) 根据文献[11]中的定理1,可以通过求解LMIs式(17)、式(18)得到状态反馈控制律δ(k)=Kz(k)和事件触发条件(此处即矩阵Q) 使得系统式(16)全局渐进稳定,即: 如果存在正定对称阵X,Y,R,Q2,标量ε>0以及合适维数的矩阵W,使得如下LMIs可行, (17) (18) 则使得系统式(16)全局渐进稳定的控制律为δ(k)=Kz(k)=WX-1z(k),相应的事件触发条件为Q=diag(Q1,-Q2)=diag(R-1,-Q2)。 验证实验用AUV网络化控制系统拓扑结构如图1所示,包含俯仰、偏航和横滚三个控制回路,传感器分布式的采集AUV运动状态,通过网络传输给共享控制器节点,解算控制律,并通过网络发送控制指令给舵机控制器。仿真实验平台使用基于Matlab的网络化实时控制系统仿真工具包TrueTime[12]搭建。 根据AUV运动的控制性能可以确定出采样传输周期的上限,而采样传输周期的下限一般受限于网络的带宽调度策略。假设研究的控制回路中采样数据包和控制命令数据包长度之和为640 b,当网络传输速率为100 Kb/s时,这些数据包的传输时间(ci)为6.4 ms。选择采样数据传输周期为h1=20 ms,h2=30 ms,h3=40 ms,使其符合RM实时调度策略的可调度性约束条件。 RM实时调度策略的可调度性约束保证了数据包传输延迟不大于传感器的采样周期。特别地,我们研究的系统中传感器按采样周期测量系统状态,但是否需要通过网络向控制器节点传送该状态却是由式(14)所示的事件触发条件决定的。我们期望提出的事件触发鲁棒控制策略,能够使系统在产生较小的网络负载下获得满意的控制性能。 在15 km航速下,AUV先从水平面下潜到-50 m,再调整航向角从0°到-30°,参与仿真实验的AUV模型采用方程组(1)六自由度空间运动方程,实验中未考虑水流干扰。图2—图4分别展示了通过求解LMIs式(17)、式(18)得到的可行控制增益和事件触发条件下,AUV网络中各控制回路的响应。由于六自由度空间运动方程表征的AUV纵向运动和侧向运动是存在耦合的,而由于有较好的横滚角控制,将方程分解、简化后基于式(2)—式(4)设计的控制律在事件触发执行条件下依然有较为满意的控制效果。事件驱动下的AUV网络数据包传送如图5所示,其中各控制回路中的航向、姿态、深度传感器节点根据事件触发条件(14)和调度策略(15)确定访问网络的优先级,向自动驾驶仪发送采样数据,自动驾驶仪接收新的采样数据触发控制律计算并继承当前相应传感器数据包的优先级向执行舵机发送更新的控制量。当t∈[0.0,5.0]s,航行器根据定深设定值下潜,俯仰控制回路内的数据发送及控制律解算被频繁触发,而最小触发间隔受到实时调度策略的可调度性约束条件的限制,从而避免Zeno现象可能引起的网络阻塞,使数据包可调度。而由于纵向运动与侧向运动的耦合,爬潜运动使航向和横滚出现扰动,触发相关通道的数据发送和控制解算,但平均触发频率,远低于俯仰回路;当t∈[5.0,10.0]s,此时航行器深度已经稳定到设定值,数据发送触发频率下降。航行器根据设定航向角开始转向,航向控制回路内的数据发送及控制律解算被频繁触发,同时转向运动会使航行器在水动力的作用下产生横滚扰动,因此,横滚控制回路内的数据发送也被频繁触发;当t∈[10.0,15.0]s,航行器在设定深度和航向上稳定航行,各控制回路的数据传送触发频率在事件触发条件的作用下都降为较低水平。图6展示了当存在多个控制回路同时被触发访问网络时的数据包传送优先级调度情况。显然,当t∈[0.0,0.3]s时(图6(a)),航行器处于定深航行阶段,定深状态误差及其变化最大,根据调度策略式(15),其控制回路中的数据获得最高的网络访问优先权,即数据包一旦就绪,立即被调度发送而无需等待。当t∈[5.0,5.3]s时(图6(b)),航行器航行深度已经趋于稳定,航行器处在水平转向过程,因此,航向和横滚回路的数据包根据调度策略获得比俯仰回路更高的传送优先级。 图2 航行器定深响应Fig.2 The depth response of the vehicle 图3 航行器航向响应Fig.3 Vehicle course response 图4 航行器横滚控制响应Fig.4 Vehicle roll control response 图5 AUV网络数据包传送Fig.5 AUV Network packet transmission 图6 网络数据包传送优先级调度Fig.6 Network packet transmission priority scheduling 实验结果显示,相比于时间驱动的控制方法,事件驱动下,控制回路根据事件触发条件,可以动态地调节采样数据包发送间隔,误差大时,发送频率增大,系统趋于稳定时,则减小发送频率,因此可以占用较少的带宽资源取得满意的控制性能。 本文针对带宽资源受限的AUV网络化控制系统,提出一种考虑不确定延迟的事件触发鲁棒控制策略。首先以离散参数不确定切换系统描述事件驱动AUV网络化控制系统,然后通过求解线性矩阵不等式得到使系统各回路稳定的鲁棒控制策略。仿真实验表明,本文提出的控制策略可以使AUV纵向、横向控制在存在不确定网络延迟和事件触发数据包发送机制下依然保持稳定,且由于本策略可以根据系统误差动态调节网络发包间隔,因此可以占用较少的带宽资源取得令人满意的控制性能。
Γ1(h,τk)δ(k-1)





3 事件触发鲁棒控制策略
3.1 事件触发条件与调度
3.2 事件触发鲁棒控制策略设计

4 仿真实验

5 结论
猜你喜欢
北京航空航天大学学报(2021年4期)2021-11-24 01:12:56疯狂英语·新读写(2021年6期)2021-08-05 07:49:10自动化学报(2019年6期)2019-07-23 01:18:22中学生英语(2017年6期)2017-07-31 21:28:55青年歌声(2017年6期)2017-03-13 00:57:56厦门理工学院学报(2016年1期)2016-12-01 04:50:41北京航空航天大学学报(2016年7期)2016-11-16 01:51:01光学精密工程(2016年3期)2016-11-07 09:03:52系统工程与电子技术(2016年4期)2016-08-24 07:46:18通信电源技术(2016年1期)2016-04-16 04:57:35
