
基于自研巡检装置的大坝裂缝骨架检测系统
2019-03-15 13:31郝更新马嘉文张西克谷文涌田翔杨林生
电脑知识与技术 2019年2期
郝更新 马嘉文 张西克 谷文涌 田翔 杨林生
摘要:现有的大坝巡检方式较为落后,检查人员需要带安全绳下到坡底检查,由于坝体湿滑很容易出现意外。人工检测在夜晚无法检测,同时大坝存在裂缝和周围环境对比度低,光照不均匀,表面噪声污染严重等问题,难于识别。现有的大坝人工检测手段难以满足安全,准确的要求。针对现有大坝巡检方式的问题,自研了一套大坝裂缝巡检骨架提取系统。系统中的巡检装置采用分层设计模式进行设计,系统运用了图像增强以及图像分割算法对采集到的大坝裂缝图像进行骨架提取,极大地提高了巡检的准确率。
关键词:人工巡检;大坝裂缝;自研;巡检装置;裂缝骨架;图像增强;图像分割
中图分类号:TP311 文献标识码:A 文章编号:1009-3044(2019)02-0226-03
电站设备和管理都相对陈旧[1]。1954至2005年,中国平均每年有68座大坝毁坝。中国大坝的年均溃坝率是世界平均溃坝率的4倍多。大坝裂缝,作为大坝最常见的一种病害,是大坝垮坝的最大安全隐患。裂缝[2]不仅仅存在大坝表面,大坝的裂缝同时还会不断地像大坝结构体的内部延伸发展,可能会造成大坝更大的损害。现有的大坝面板巡检工作方法较为落后,检查人员需带安全绳下到坡底检查的办法。加之坝体湿滑,检查人员无法长时间保持一个正确的姿态,完成细致的检查工作,并且工作人员存在摔伤溺水的安全隐患。
国外研究报道中,对水库面板的自动巡检的直接研究较少,但是类似自动巡检装置的研究较多。圣保罗大学的Pinto,J.K.C等设计出一种变电站巡检系统中巡检装置对变电站现场设备工作温度进行监测。日本东京工业大学研制了一款电力巡检系统,该系统由巡检端和控制端组成。巡检端可利用机械臂实现越障功能,完成对输电线路的检测。加拿大魁北克水电站研制了一种变电站巡检系统,该系统实现了对多个变电站區域的巡检。该系统搭载了可见光图像采集系统可实现远程的监控。国内也较多展开自动巡检装置的研究。王长生[3]等研发出了基于物联网的大坝自动巡检系统,通过引入智能化的物联网技术解决大坝巡检的相关问题。张行[4]等设计了一种新型的矿用带式输送机巡检机构系统,该系统基于无极绳牵引原理使巡检设备往复运行。水库面板自动巡检系统的研究尚属于一个空白,因此具有重要的研究价值和实用价值。
本文是提供一种基于自研巡检装置的大坝裂缝骨架检测系统,降低检测人员的工作风险。同时高效率的完成大坝裂缝巡检工作。
1 系统组成
本系统采用分层设计模式进行设计,分为机械层,电气层,图像采集层,控制计算层。
机械层承载电气层、图像采集层和控制计算层的软硬件设备。电气层提供大坝巡检自动行走以及坝体面板移动小车的动力,并且为机构提供供电。电气层通过串行通信接口与控制计算层进行通信,将传感器采集的信号传送给控制计算层,并且接收控制计算层给出控制信号来实现大坝巡检自动行走装置沿坝体和垂直坝体两个方向的运动控制。数据采集层实现坝体图像数据的采集,包括工业相机、极光照明、云台等部分组成。此部分通过工业千兆以太网与控制计算层相连,一方面接收控制计算层控制参数包括图像采集、云台控制、照明控制,另一方将采集的通向数据传送给控制机算层,进行图像拼接及裂缝异常检测。控制计算层由DSP硬件及安装在其中的电气驱动程序、图像采集程序及图像处理程序组成, 接收电气层位置传感器信号和障碍物信息,实现大坝巡检自动行走装置的运动控制;控制图像采集层实现云台控制、照明控制和图像采集(与运动控制相配合),并且接收所采集的图像信息。通过接收到的图像实现大坝面板的自动监测,并且通过裂痕异常检测算法寻找大坝面板的破损或是疑似破损的部位,辅助测试人员完成大坝巡检。
2各层次设计
机械层由桁架结构水平载人移动机构,坡坝下沿斜面移动的载人小车,及图像采集系统组成。承载电气层、图像采集层和控制计算层的软硬件设备,在不破坏坝体承重的前提下,承重部分保证整体结构的刚性并且保证承载受力均布,非承重部分采用铝合金结构,轻便美观,降低整体重量,减少对坝体的影响。保证其余三层软硬件的安装需求,并且可靠安装;机械层的桁架结构水平载人移动机构设计理念为除防浪墙顶部极限位置必要的限位装置外,不在坝体内、外任何部位进行破坏性施工,以防浪墙,混凝土构件为导轨。水平移动机构共设置了两个为一组驱动轮。为了保证其运动轨迹不偏离,误差小于20毫米,采用了四组从动轮,分别位于驱动轮内侧一组,防浪墙顶部一组,坝内两组。为合理的保护防浪墙,全部轮组(包括驱动轮)均为弹性更好的胶轮。确保对坝体没有影响;机械层的坡坝下移动的小车,其驱动采用绞车带双钢丝绳放下和提升,断电制动确保载人的安全性。且吊车完全框架折叠结构,大大减少风阻。
电气层由直流电机、绞车、传感器和电池构成电气系统,电气层不但提供大坝巡检自动行走以及坝体面板移动小车的动力,并且为整理机构提供供电。通过串行通信接口与控制计算层进行通信,将传感器采集的信号传送给控制计算层,并且接收控制计算层给出控制信号来实现大坝巡检自动行走装置沿坝体和垂直坝体两个方向的运动控制;电气层采用多轮AGV方案设计装置行走部分,其驱动部分采用直流电机和传动箱组合,反对称安装方式;意大利CFR驱动轮协助AGV控制系统的完成。控制系统包括:地面控制系统及车载控制系统,其中,地面控制系统指AGV系统的固定设备,主要负责任务分配,车辆调度,路径(线)管理,交通管理,自动充电等功能;车载控制系统在收到控制计算层的指令后,负责AGV的导航计算,导引实现,车辆行走等功能;驱动轮的型号为FH300-AC1.5,额定功率1.5KW,额定电压48V,额定电流21.25,电机额定转速2427r/min,驱动轮速比32,驱动轮直径300mm。驱动轮速度71.48m/min,驱动轮扭矩160.54Nm。单只驱动轮载重1500kg。制动扭矩8Nm。电气层实现坝体面板移动小车的运动控制,实现移动小车与桁架间通过双钢丝锁实现收放,及有线控制。采用THREN公司的载人型气动绞车来实现坝体面板移动小车的驱动,此气动绞车采用活塞式气动马达,具有稳定稳定的功率输出和超长的使用寿命;并且可以通过精确的控制阀依靠平稳的变速控制设计,使得它能够精确的定位和远距离拉升。盘式自动制动器采用弹簧设计,气压释放和油冷却,使得该系统能够循环使用并延长使用寿命。通过重型功能和长柄钢带制动设计用较小的力量和提供高达150%的刹车效能。紧凑型设计和高效率的传动装置降低功耗和发热量,同时提高使用寿命。油压传动装置,双油压密封圈防止油料泄露。绞车具有双筒结构,两根钢丝绳共同拖拽小车,每根钢丝绳额定垂直起吊为1000kg,仅单根钢丝绳的安全系数就是实际重量的3倍,双钢丝绳的安全系数是6倍。绞车采用48V直流无刷电机,可无级变速。总传动比60.57,丝筒转速23.77r/min。电气层电池组设计采共用选择48V/210Ah动力镍氢电池组,采用D7500宽温动力镍氢电池。
数据采集层实现坝体图像数据的采集,包括工业相机、极光照明、云台等部分组成。工业相机支持最大2592×1944@30fps高清画面输出,并且支持H.265高效压缩算法,可较大节省存储空间。可在超低照度的条件下进行工作,支持0.02Lux/F1.6(彩色),0.002Lux/F1.6(黑白) ,特别适合在可视条件差的情况下采集大坝面板图像。摄像头支持23倍光学变倍,16倍数字变倍,可以实现多角度的聚焦。照明系统采用高效红外阵列,低功耗,照射距离达200m,支持三码流技术,每路码流可独立配置分辨率及帧率,支持3D数字降噪、宽动态、透雾、强光抑制、电子防抖等功能。云台系统支持360°水平旋转,垂直方向-20°-90°,可以全方位的采集大坝面板图像。工业相机还具备防雷、防浪涌、防突波,IP66防护等级。
控制计算层可以分为两部分,图像采集控制板以及运动控制板。图像采集控制板完成图像采集和存储、图像识别和存储功能。运动控制板完成上水库面板巡检载人自动行走装置的自动行走控制。图像采集部分主控选用TI公司的多核DSP TMS320C6678,外接512MB DDR3和128MB FLASH实现外围扩展。通过千兆以太网连接工业相机完成图像采集,可通过DSP完成图像处理,自动检测大坝坡面的异常或损坏。运动控制部分采用Xilinx公司的FPGA实现主控功能,通过位置传感器获取水库面板巡检载人自动行走装置的实时位置,实现自动行走控制。自动巡检装置上搭载DSP、FPGA、工业相机、位置传感器等芯片和设备。正常情况下,自动巡检装置在水库面板上的轨道上运动,位置传感器用来检测自动巡检装置车轮的角位移,来确定自动巡检装置的位置。相机在拍摄完一组照片后需要运动到拍摄下一组照片的位置,可以在自动巡检装置的车轮上连接位置传感器来检测车轮的角位移,车轮旋转到设定角度后开始拍摄下一组照片。水库面板两端有限位开关,当自动巡检装置运动到水库面板两端时,位置传感器的缓存数据会清零。为了控制自动行走装置的走停,需要完成对自动行走装置驱动电机的转速进行控制。位置传感器会将计数脉冲经FPGA传递给DSP中PID控制器,然后DSP将PWM脉冲发送到FPGA,进而控制电机的转速,达到自动巡检装置的运动控制。
电机转速控制一般采用PID控制算法。使用千兆以太网根据TCP/IP协议控制数据采集层完成相机云台控制,DSP芯片具有以太网相关协议栈。
使用千兆以太网根据TCP/IP协议控制数据采集层完成相机云台控制,DSP芯片具有以太网相关协议栈。
选用TI公司的TMS320C6678多核DSP芯片。相应的评估板TMDSEVM6678L。参数特征:单个C6678多核处理器,512MB DDR3,128MB NAND 闪存,1MB本地启动的I2C EEPROM(可能为远程启动)板载10/100/1000以太网端口(第二个端口位于AMC连接器上)RS232 UART。用户可编程LED和DIP开关。多核软件开发套件(MCSDK)与TMDSEVMPCI适配卡兼容。
DSP的裂缝检测算法分为两大块,为图像增强算法和图像分割算法。
由于大坝裂缝图像存在对比度低,噪声干扰严重,雾气干扰,光照不均等情况。直接进行裂缝的图像分割骨架提取结果很难令人满意。因此有必要先进行图像增强算法。图像增强算法主要是对图像进行去雾处理。图像分割算法主要是通过图像分割操作提取裂缝骨架。
3 系统涉及算法
3.1图像处理算法
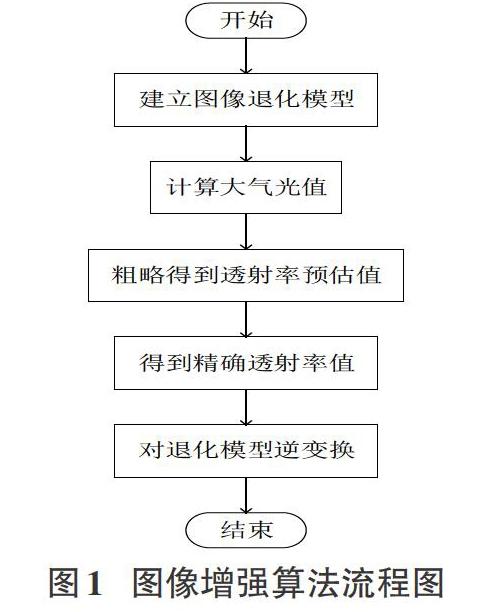
图像增强算法采用暗通道去雾的算法[5]进行去雾化操作。暗通道去雾算法[6]的思想是通过从成像的角度进行考虑,对雾化图像形成的原因进行分析。图像雾化[7]的原因在于空气折射散射时造成的图像信息丢失。所以通过建立雾天图像成像[8]退化模型,然后通过退化模型[9]即可反求原图像。整个图像增强算法的关键在于如何快速准确的求取退化模型中的各个参数值,即大气光值和透射率[10]。
图像增强算法流程图图1所示。
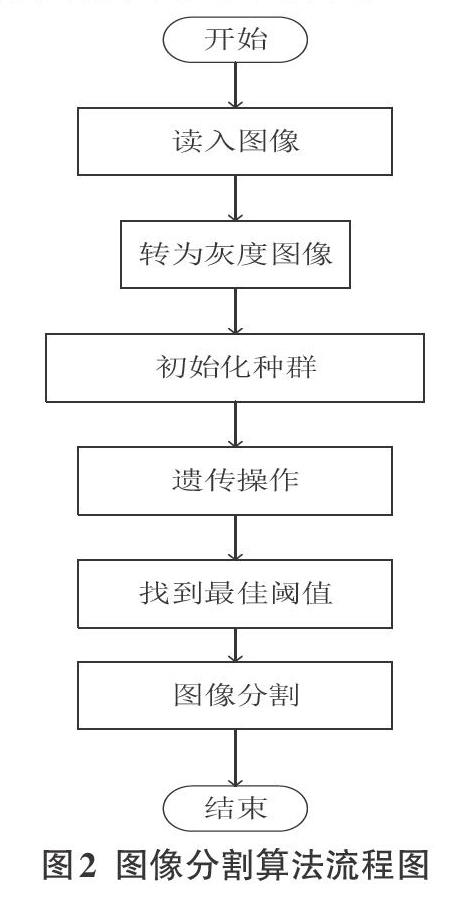
图像分割算法为基于遗传算法确定最佳阈值的大津阈值分割算法。算法的思想在于通过遗传算法迭代推演出最佳的分割阈值,然后通过大津阈值分割算法进行图像分割提取出图像骨架。
图像分割算法的流程图如图2所示。
4 实验结果
本次实验结果都是基于自研巡检装置大坝裂缝骨架提取系统。
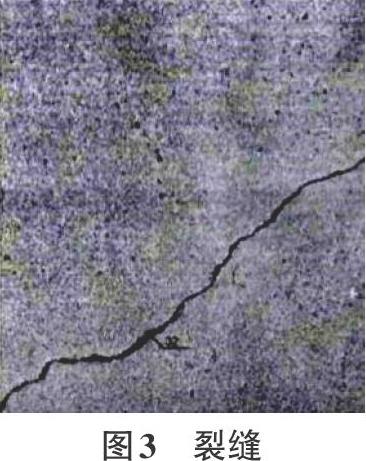
图3为采集到的裂缝图片。
对图3进行图像增强处理后,得到增强后的裂缝,如图4所示。
对增强后裂缝a进行骨架提取,得到的骨架图像如图5所示。
由裂缝图像增强结果来看,本文提出的图像增强算法已经可以极大地提升图像的对比度以及清晰度。在经过图像分割图像后原始尺寸的大图有很好的骨架提取效果。而如果采取人工方法检測,会存在各种风险。同时,裂缝本身图片对比度清晰度比较低,识别清晰度很差。本系统处理后识别效率很高。
4 结论
传统的大坝水库面板巡检需要人工操作,在坝体湿滑和其他恶劣天气情况下不仅巡检困难效率低下还容易出现安全问题。本文提出的系统不需要破坏坝体的强度。通过以防浪墙本身做导轨,使平台可沿防浪墙前后移动,同时检修小车沿坡坝上下移动,来完成检修人员的安全输送。在超低温,零下30度可正常充电正常工作。同时,运用了图像增强算法和图像分割算法,对对比度低噪声污染严重的大坝图像进行了图像处理。使得处理结果更加高效。可以轻易地识别出大坝裂缝的骨架。本系统最终可以清晰地提取大坝裂缝的骨架。如何对提取的裂缝骨架进行准确有效分类,是可以继续研究改进的细节问题。
参考文献:
[1] 夏淑容,李小磊.红星水库大坝面板裂缝成因分析及处理措施[J].水利科学与寒区工程,2018,1(09):65-67.
[2]马丽,段庆伟.某水电站大坝变形与裂缝成因分析[J].山西建筑,2017,43(26):211-213.
[3] 王长生,马福恒,何心望,俞扬峰.基于物联网的燕山水库大坝智能巡检系统[J].水利水运工程学报,2014(02):48-53.
[4] 张行,李伟,武倩平,邱明权,任勇.新型带式输送机巡检机构系统设计[J].制造业自动化,2015,37(06):79-82.
[5] 赫更新,马嘉文,张西克,潘大为,陈亮.改进暗通道的大坝图像去雾算法[J].应用科技,2018,45(01):84-88.
[6] 张江鑫,周佳波,孟利民.改进的暗通道先验快速图像去雾算法[J].计算机应用,2017,37(08):2324-2328.1217-1221.
[7] 孙小明,孙俊喜,赵立荣等暗原色先验单幅图像去雾改进算法[J].中国图象图形学报,2014(03):381-385.
[8] 张登银,鞠铭烨,王雪梅等一种基于暗通道先验的快速图像去雾算法[J]. 电子学报,2015(07):1437-1443.
[9] 范新南,陈伟,史朋飞等基于模糊集分类的单幅图像去雾算法[J]. 光电子·激光,2016(08):876-885.
[10] He K, Sun J, Tang X. Single image haze removal using dark channel prior[C]// Computer Vision and Pattern Recognition. CVPR 2009. IEEE Conference on. IEEE, 2009:1956-1963.
猜你喜欢
航天返回与遥感(2022年2期)2022-05-12
燃气涡轮试验与研究(2021年6期)2021-08-01
海洋信息技术与应用(2020年4期)2021-01-18
中国生物医学工程学报(2019年5期)2019-07-16
北京航空航天大学学报(2017年3期)2017-11-23
警察技术(2015年1期)2015-02-27
