智能水下机器人技术研究现状与未来展望
2019-03-15 01:29:58于洋
电子制作 2019年4期
于洋
(山东省青岛第二中学,山东青岛,266100)
0 引言
地球上海洋的总面积约为3.6亿平方公里,约占地球总表面积的71%,海洋中蕴含着丰富的资源。随着经济和科技的发展和陆地资源逐渐匮乏,海洋的价值也越来越被人类重视,海洋开发成为了当今各国发展的重要途经。近几年我国各项海洋技术都得到了大幅度的发展,水下机器人是海洋开发技术的重要技术之一。水下机器人可在被严重污染环境、危险程度高的环境以及可见度为零的水域代替人工在水下长时间作业,具有良好的工作能力。同时,水下机器人在石油开发、科学研究、海底地貌勘察、水下实施检查和军事等领域也得到了广泛应用。
1 水下机器人的定义和分类
水下机器人也称作无人水下潜水器,它可以在水下代替人类完成某些复杂任务。水下机器人的分类方式有很多种,通常可以分为载人水下机器人(HOV),遥控机器人(ROV)和智能水下机器人(AUV)三类,见表1。
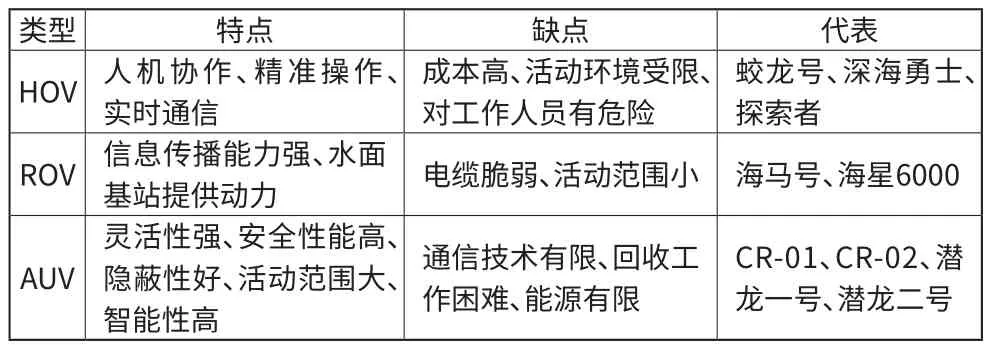
表1 水下机器人的分类
2 国内外水下机器人研究现状
2.1 载人水下机器人发展现状
载人水下机器人包括蛟龙号和深海勇士号等。蛟龙号载人潜水器是中国自行设计、自主集成研制的第一台作业型深海载人潜水器,在2012年6月,蛟龙号创造了下潜7062米的中国深潜载人记录。深海勇士号载人潜水器是中国第二台深海载人潜水器,它可以下潜到水下4500米处进行作业。
2.2 遥控机器人发展现状
遥控机器人包括海马号、海星6000等。海马号是我国自主研制的首台4500米级深海遥控无人潜水器作业系统,最大下潜深度达到4502米,并完成了海底地震仪海底布放、水下布缆等多项任务。海星6000是我国首台自主研制成功的6000米级有缆遥控水下机器人装备,由中科院沈阳自动化研究所联合中科院海洋所等单位共同研制,最大下潜深度6001米,为我国ROV最大下潜深度。
2.3 智能水下机器人发展现状
智能水下机器人包括包括AUV以及水下滑翔机(UG)等,潜龙一号是由中科院沈阳自动化所联合中科院声学所、哈工程大学研制的AUV,深入水下6000米,可以在水下工作中完成了探测海底地形地貌等一系列任务。潜龙二号是以中科院沈阳自动化作为技术总体单位,与多个研究所共同研制的水下机器人,可以用于多金属硫化物等深海矿产资源的勘探作业。“海燕-II”是由天津大学研发的一款水下滑翔机,针对于工作深度、航行速度等方面实现优化发展。“海翼”深海UG是中国科学院沈阳自动化研究所在2017年研制出的一款7000米级水下机器人。天津大学研制的“海燕-10000”以8213 米的深度创造深海UG的世界纪录。
2.4 国外研究情况
国外一些国家对AUV的研制开始较早,有较长的发展历史,在近代的海上工作中发挥了巨大作用。主要AUV包括:REMUS 6000(挪威Kongsberg公司)、Blue fi n21(美国Hydroid公司)、Autosub 6000(英国南安普顿国家海洋中心)、SeaBed AUV(美国伍兹霍尔研究所)等[1]。
3 水下机器人关键技术研究概述
3.1 智能控制技术
3.1.1 智能控制
智能控制是一个由人工智能、自动控制和运筹学的交叉构成的交叉学科。近年来,智能控制技术成为水下机器人发展的一个重要技术。水下机器人难于控制的原因有几个方面,水下机器人在运行中收到海流等外界极不稳定环境因素的干扰,使其控制变得更加困难;水下机器人各项参数的高度的非线性的特点;水下机器人的水动力性能在不同的海洋环境下会改变较明显;海底水下机器人水动力系数难以测量,不能获得一个较为准确的数据;水下机器人体积大、质量大,因此所受惯性大,运动变化难以在较短的时间内实现;水下机器人在运动过程中重心和浮心易改变会引起控制较为困难等。智能控制如果能用在水下机器人,可以更好的使其适应复杂的海洋环境。
3.1.2 智能控制的发展概况
智能控制技术应用于60年代,形成于70年代,应用实践于80年代,快速发展于90年代。
3.1.3 智能控制系统的类型
(1)专家(仿人)控制系统:由工程控制论和专家系统结合而成,总结人的控制经验、方法和各种人类自主进行的推理技巧,进而实现控制的一种经验控制系统。
(2)神经网络控制系统:将一些变化信号经过神经网络系统的评价函数映射为控制信号对系统进行控制。
(3)模糊控制系统:应用于无法建立数学模型或者难以建立数学模型的情况之下。
(4)分级集成智能控制系统:运用多个层次的系统结构来实现控制,或运用多种控制方法类型结合在一起构成的智能控制系统[2]。
3.1.4 智能控制的主要功能特点
水下机器人智能控制的主要功能特点有自适应功能、学习功能、组织功能、鲁棒性、容错性、实时性等。自适应功能、学习功能、组织功能是水下机器人智能控制的核心技术,鲁棒性、容错性、实时性是水下机器人智能控制的基础和保证。
3.1.5 智能控制的应用对象
(1)更加复杂的任务要求
引入智能控制技术解决传统的控制技术难以精准控制的复杂任务。
(2)非线性的模型
引入智能控制系统,对非线性模型的处理上实现进一步的研究及处理。
(3)掌控自适应能力的模型
引入智能控制技术提高水下机器人的自适应能力和自我决策能力,机器人能够较好地处理特殊情况,使控制更加自如有效[2]。
3.2 导航通信技术
3.2.1 导航通信
由于噪声、洋流等多种环境因素对导航过程的影响,水下机器人的实际运行路线与规划路线会有较大的偏差,通过对导航通信技术的研究,可以在提高导航精度、提高机器人完成任务的能力等方面实现突破。
3.2.2 导航技术分类
(1)航位推算:通过记录机器人自身的运动方式和运动时间,大致推算机器人的航行位置。但由于不同洋流等不确定因素众多,航位推算的准确率较低。
(2)惯性导航:惯性导航系统实质上是一种参数测量装置,可以测量加速度、角速度等多种物理量以致于实现辅助导航的功能。
(3)GNSS的定位方法:通过研制水下GPS导航定位系统提高水下航行的精度,该系统的精度极高,位置测量精度可达5厘米[3]。
(3)多普勒声纳导航:应用多普勒效应,通过检测声音的传播差异,推算出距离的差异,从而实现导航,这种导航技术适用的空间范围大,但是精度较低。
(4)视频导航:通过进行水下视频实时传导实现导航,精度较高,但在长距离导航时运用的能力较差。
(5)组合式导航:多种导航技术相结合。例如:在距离目标距离较远时运用声纳导航,虽精度较低,但可以实现快速运行;在距离目标较近时运用视频导航,实现高精度的准确导航。
3.2.3 通信技术
通信技术就是通过某些技术的支持实现良好的信息传递,主要的方式有水声通信、电缆通信、蓝绿光通信以及庞大的通信系统构成的通信网络等。
在陆地上主要运用的通信方式是电磁波通信,但是在海洋中,电磁波难以长距离传播,因此水声通信成为水下较好的通信方式。它的工作原理是通过数字化处理技术将声音、图像、文字等信息转变为电信号,利用信号转化装置将电信号转化为声信号,发射端以水为媒介将声信号传递出去,接收端接收到信号后,再将声信号转变为电信号,进而转化为声音、文字、图像等信息[4]。此外,电缆通信也是一种运用较多的通信技术,主要运用于ROV上,具有传播信息量多、传播信息稳定性高等特点,但由于电缆的限制,导致这种通讯方式控制的机器人活动能力受限,不能大范围运动。随着科技的发展,蓝绿光通信成为了当前的主要发展方向,蓝绿光通信具有传播速度快、抗衰减能力强等诸多优势,有望在水下机器人的通信中实现新突破。
3.3 组网编队技术
为了更好的实现导航通信技术,组网编队技术显得尤为重要,建立水下机器人组网编队通信系统结构有诸多优势。组网编队可以给予水下机器人个体之间的信息交流传递、协调配合一定的支持,同时使信息可以在机器人内部不同功能模块之间流通,从而实现了从单一个体到集群组网工作的突破。相关的领域主要有:协助观测、任务分配、立体综合观测网等[5]。
4 水下机器人未来发展趋势和展望
4.1 智能化
使水下机器人更加智能化。更好的运用智能控制系统于水下机器人之中,提高水下机器人自适应、自学习、自判断能力,使水下机器人在遇到不同状况时可以作出准确且恰当的决定,能够最大限度地适应外部环境。同时实现水下机器人的导航定位准确化。研制出更加精确的水下环境感应系统,从而更加准确的判断环境对航行路线的影响,实现航行定位的更加准确化。
4.2 工作集群化
从个体机器人作业向机器人组网编队集群作业转化,建立水下作业网,以更好的进行水下任务和海底探测。
4.3 通讯稳定化
由于水声通信、有缆通讯等的局限性,在未来蓝绿光通信将会成为研究的一个重要方向,其具有抗衰减性强、稳定、传播速度快等诸多优点,有利于实现海底通讯的稳定化。
5 结束语
目前水下机器人通过对智能控制、导航通信等技术的应用,达到了水下机器人的基本控制效果,各国高度重视各类型水下机器人的组网编队对海地观测、军事目标探测的应用,这也是未来的一个重大发展方向。
猜你喜欢
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
少儿科学周刊·少年版(2022年19期)2022-05-30 10:48:04
小哥白尼(趣味科学)(2019年7期)2019-11-16 09:04:14
学苑创造·A版(2017年4期)2017-05-13 22:56:42
太空探索(2016年12期)2016-07-18 11:13:43
太空探索(2016年9期)2016-07-12 10:00:02
太空探索(2016年6期)2016-07-10 12:09:06
少儿科学周刊·少年版(2015年4期)2015-07-07 21:13:44
少儿科学周刊·少年版(2015年4期)2015-07-07 21:09:31
少儿科学周刊·少年版(2015年4期)2015-07-07 21:08:08