
船舶“端点”在港内受限水域中的重要应用
2019-03-12 22:39陈春洪
珠江水运 2019年3期
陈春洪
摘 要:世界航运正在向船舶大型化发展,相比较而言,港口水域就显得越来越狭小,尤其是进入泊位附近,船舶操纵时更是需要谨慎驾驶,近距离接近码头或者物标时,大盲区在船舶引领过程中会给驾引人员造成特别大的心理压力。本文提出“端点”“视觉端点”和“视觉端点线”等新概念,并探讨在受限水域内船舶靠离泊时船舶端点、视觉端点的应用,为驾引人员在港内受限水域中的操纵,尤其是掉头靠泊、离泊的安全操作提供参考。
关键词:端点 船舶 受限水域
引航属于以专业技术提供社会服务的行业,是船舶進出港口重要的技术保障,代表了一个国家港口服务能力海运发展的综合水平。船舶进出港口、靠离码头是船舶航行中最为复杂的工作之一。由于港口水域有限,航道通行密度大,海域情况复杂,且船舶体积大、惯性大,泊位与泊位之间距离紧凑,造成船舶靠离泊控制困难,对引航技术也提出更高的要求。
笔者通过多年在港内受限水域内引领船舶航行及靠离泊操纵,提出“端点”这个新概念,并总结出端点在实际操船中的应用,不仅对普通船型的驾引工作可以做到得心应手,对于盲区大的现代化大型船舶更是能够做到保障其安全,具有很强的借鉴、指导意义,供驾引人员参考。
本文中,当讲述船尾时,不仅仅以船尾特例,船头不做累述。
1.端点的定义
端点是指当船舶一端甩向某一物标时,船舶距离物标在水平面上的最近点,分为前端点和后端点。如船舶在离泊调头时,一端甩离码头,则称前端点;另外一端则反向甩向码头,称后端点。如图1所示。
船舶在海上航行,因可航水域宽阔,因此,即使是超大型船舶,驾驶员也仅仅关注船位点等信息,而忽略船舶自身长度与宽度等的影响。但在狭窄水道内尤其是靠离码头时,因空间极为有限,在操纵过程中驾引人员必须极其谨慎,绝不能忽略船舶的空间尺度,并时刻关注船头、船尾、船底、船舷、净空高点等与碍航、码头、桥吊、他船等的相对位置,以免发生碰撞。这些有可能发生任何碰撞的船舶位置,即为船舶的端点。
2.掌握客观资料
2.1查阅本船的引航卡(Pilot Card)和船舶资料卡(Ships Particulars)。第一,从中获得船舶驾驶台到船头和船尾的距离,掌握好这两个客观距离,即表示了有了控制好船位的基础,才可能精确地让端点与码头保持所需的距离;第二,获得本船船头、船尾的造型结构细节。
2.2通过查阅前后靠泊船舶船宽。
利用ECDIS、WEB互联网、雷达、AIS等导航系统,查阅该船的船宽,以此数据作为客观衡量标准,用其外档船舷线作为本船判断、衡量本船驾驶台(即引航员站立位置)距离码头的趋势和距离。
若泊位无其他船舶靠泊时,利用其他助航标志如桥吊、浮筒、串标等,方法不变,依然可以找到为判断、衡量距离码头的趋势和距离。
2.3码头“条纹”。
因为各码头等级不同,缆桩距离、碰垫距离都不一样,为了便于核算距离,厦门港所有泊位每隔20米都用红白油漆做了统一长度的标记。如图2所示。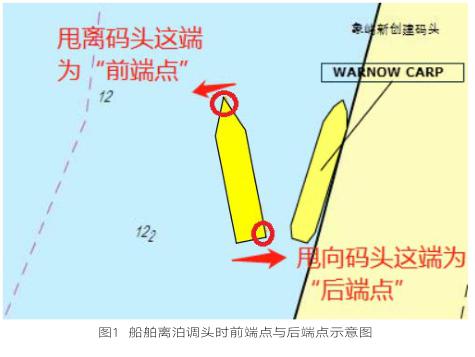
3.船舶端点确认法
船舶靠离码头时,船长及引航员最关心的是船舶与码头间的距离,随着船舶大型化,船舶盲区越来越多大,船舶端点与码头距离的判断就显得尤其重要。笔者通过不断地实际操纵,总结出以下十种方法:
3.1登轮前观察法
离泊时,以确定船尾后端点方法为例,如采用图1所示的船舶离泊方法,本船向左掉头,船尾的结构一般为内收弧度,如图3所示,引航员登轮前,需要认真观察离泊船的造型结构、配载情况、吃水、潮高、码头高度等,并做到心中有数,可预推断出船尾的后端点;抵达驾驶台后,需要核实所观测的情况,以确认船尾后端点。船头前端点同理。
进港时,当引航艇从海面上接近被引船时,同样需要认真观察船舶造型结构、配载情况、吃水等,从而进行相应预判。
这两种预判,除经验之外,还需要在登轮后查阅引航卡和船舶资料卡,进行更精确的判断。
3.2缆桩位置判断法
如图2所示,缆桩是指岸边设置的系缆桩,用来供停船时拴缆绳。以船尾为例,目测找到船尾的尾缆缆桩和尾倒缆桩,它们的中心点可作为尾端点,为增加阈值,也可以直接把尾缆缆桩的位置当成是尾端点;如果是寻找船头的前端点,方法相同。
3.3拖轮协助法
拖轮在端点旁侧协作时,拖轮驾驶员可以从旁侧观察到端点距离物标的距离,引航人员可咨询拖轮驾驶员,反推本船端点的位置。
3.4值班驾驶员协助法
本船值班驾驶员一直站在端点位置观察安全距离、动态等,相比驾驶台位置,相对会更直观明了,引航员在操作时可直接进行咨询核对。
其中方法3.4比方法3.3更有优势的是:第一,本船值班驾驶员可以报告动态,即船舶在离泊时是远离码头还是接近码头;第二,本船驾驶员站立的位置几乎就是端点,而拖轮驾驶员则相距甚远。
但两种方法都具有不精确因素,即不论拖轮驾驶员还是本船驾驶员,都存在目测距离能力的误差,因此这两种方法只能作为参考。
3.5计算法
计算法主要是数缆桩的个数和条纹的条数。例如,未离泊时,站在驾驶台一侧,先找出驾驶台对应码头上的点,然后根据本船驾驶台距离船头的距离和距离船尾的距离:第一,如果码头的缆桩距离固定且清楚,如图2所示,直接计算反推出前端点及后端点的位置;第二,也可通过码头条纹数判断,如图2所示,即一旦船舶稍微离开码头,就可以观察到码头上的20米红白条纹或者黄黑条纹,计算条纹数目,反推计算出前端点及后端点的位置。此方法的缺点是,船舶若离开泊位太远,则失去本船和计算端点进行对比的最佳时机,距离越远,误差会越大。
3.6日照阴影法
阳光照射,会直接照射出本船在海面上的阴影,简单直接,如图4所示,其缺点是,日照阴影会随着太阳高度和照射方位的变化而变化,且变化比较大,尤其是阳光从正上方照射时,驾驶员站在驾驶台,是看不见阴影的;阴雨天和太阳落山后,此办法就失效;此外,使用日照阴影法时,要充分考虑船头的造型结构,并作出相应的微调整。
3.7侧推器排出流法
侧推器是指一种助船转向的装置,一般设于船首部横向管道内,由电动机带动的螺旋桨,能将一舷的水排向另一舷,借助水的反作用力帮助船舶转向。在侧推器使用中,会在水面上形成明显的排出流,此排出流的波纹与船舷交接点,即可参考作为端点。因为潮汐和流压,波纹会被明显的抑制到下流一侧,应用时应增加其阙值。
船舶大小侧推器的位置距离船首柱距离不尽相同,大型船舶大些,大致10米至40米之间,可以通过船舶布置图查阅。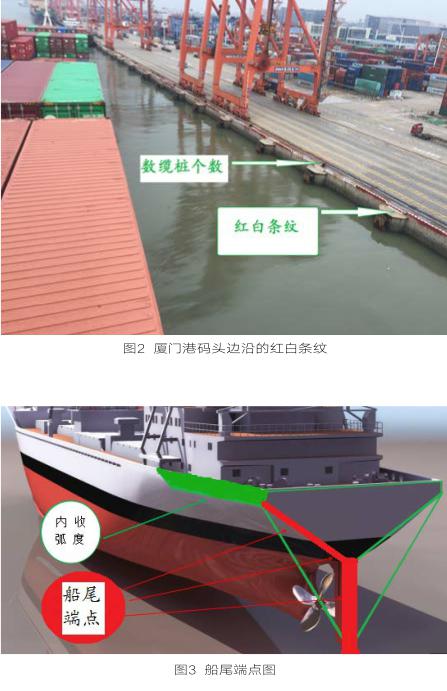
3.8激光测距法
激光测距仪是利用调制激光的某个参数实现对目标距离进行测量的仪器。激光测距仪测量范围一般为3.5~5000米。
按照测距方法分为相位法测距仪和脉冲法测距仪,脉冲式激光测距仪是在工作时向目标射出一束或一序列短暂的脉冲激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。相位法激光测距仪是利用检测发射光和反射光在空间中传播时发生的相位差来检测距离的。激光测距仪重量轻、体积小、操作简单速度快而准确,其误差仅为其它光学测距仪的五分之一到数百分之一。
3.9桅灯阴影法
桅灯是安置在船的首尾中心线上方,高出其他灯光,并从船正前方向每一舷正横后22.5°内,在225°的水平光弧内显示不间断灯光的白灯。对于引航员日常工作所引领的被引船而言,前桅灯设置在船体以上的高度不必大于12米。
船舶在海上航行时,由于海面受到风浪影响,尤其是有浪花存在时,桅灯光线所产生的船舶阴影不容易被看见。而港内水域海平面相对平静,易于光线反射,尤其是靠泊时,船头的甲板工作灯打开,增加亮度,导致桅灯光线照射在船体而产生的水面上的阴影更加明显。
3.10雷达法
雷达Radar,无线电探测和测距,即用无线电的方法发现目标并测定它们的空间位置,因此雷达也被称为“无线电定位”。雷达是发射电磁波对目标进行照射并接收其回波,由此获得目标至电磁波发射点的距离、距离变化率(径向速度)、方位等信息。用雷达法确定船舶前端点和后端点,首先需要知道驾驶台距离船头及船尾的距离,如驾驶台距离船头185米,在雷达上设定距标圈0.1海里,该距标圈与船首向的交点即为船舶的前端点。如图5所示。
雷达法的优点是白天黑夜均能探测远距离的目标,且不受雾、云和雨的阻挡,具有全天候、全天時的特点,并有一定的穿透能力。
4.端点判断方法汇总与比较
上述10种端点判断方法优缺点比较如表1。
5.端点的直接拓展应用
5.1视觉端点
视觉端点定义为,端点和驾驶员眼睛的连线交于本船视觉可见物体的水平面,该交点即为视觉端点,如图7所示。
5.2视觉端点线
视觉端点线的定义为:两船舷视觉端点的连线,即为视觉端点连线,如图4、图7所示。
端点的直接拓展应用:就是找到端点后,驾引人员通过视觉感官清晰扫描、精准找到“视觉端点”和“视觉端点线”。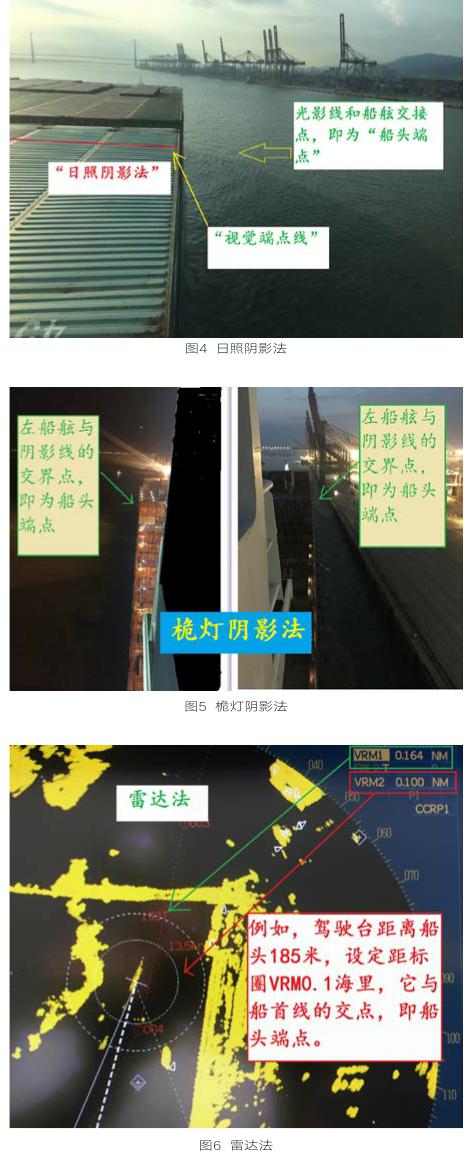
通俗地讲,就是视觉直观地找到本船的船头或船尾,尤其是在操纵超大型船舶时,这对于盲区所造成的心理压力会大大减轻。
6.端点的其他应用意义
6.1精确端点与码头之间安全距离控制
靠泊、离泊是船舶航行中操纵频繁、气氛凝重、险象环生的一段旅程,最重要的安全环节就是防止碰撞码头或者码头设施,通过精确端点与码头之间安全距离,控制安全阈值,提高靠离泊安全性。
6.2精确本船船位
在需要掉头的引领过程中,掌握本船前后端点与掉头区边界线的距离,即可充分掌握本船位。由于一般港内掉头区水域有限,当船舶未动时,转心在船中,而当船舶有速度,转心就会往前进的方向移动。随着转心的变动,一则拖轮顶推、拖拽的力臂就会改变;二则本船往码头甩的一端的力臂增长。为防止碰撞码头,此时利用端点就能够较好地防止碰撞发生,这对于大型船舶和重载船舶尤其重要,尤其是风大流急时。船位的控制,意味着安全保障。
6.3协助避碰、避让,防止搁浅
由于港内可航水域面积有限,几乎都是近距离避让,当近距离有小渔船接近,或者当避让浮筒、物标、碍航物时,都可以利用端点判断是否需要采取进一步措施,以及是否能够清爽。
6.4为下一步操纵做好精准判断
一切操纵手段的采取,都必须是建立在正确的、精确的判断上,越是精确的手段,越能够为下一步的操纵打好坚实的基础,相反,很多碰撞事故都是由于凭感觉判断,再采取所谓正确的操纵而导致碰撞事故的发生。此外,对拖轮的使用,利用端点知识的操纵总结,引导引航员在操作中,对拖轮在顶、推、解缆的时机上进行精确把握。
本文提出端点、视觉端点新概念,并对端点进行详细的解析,从而进一步找到视觉端点。端点包含了船头和船尾的最长点,但船头和船尾的最长点不一定就是端点,端点的确认方法涵盖内容多,可应用于不同的天气、不同的光线、不同的地点、不同的船型,具有普遍意义。随着船舶大型化的发展,船头、船尾盲区也越来越大,应用端点能直接克服盲区所造成的驾引人员心理恐惧,又是在港内受限水域,对驾引人员实操具有很好的借鉴意义。当然,诸多的端点确认方法需要驾引人员在实操中不断反复练习、总结和修正。
参考文献:
[1]古文贤.船舶操纵[M].大连海运学院出版社,1993.
[2]陆志材,王逢辰.船舶操纵[M].大连:大连海事大学出版社,2001.
[3]洪碧光.船舶操纵原理与技术[M],2007.
猜你喜欢
数学物理学报(2022年2期)2022-04-26
船舶(2021年4期)2021-09-07
语数外学习·高中版中旬(2020年8期)2020-09-10
小哥白尼(趣味科学)(2019年10期)2020-01-18
船舶标准化工程师(2019年4期)2019-07-24
军工文化(2017年12期)2017-07-17
数学物理学报(2017年1期)2017-06-05
中国船检(2017年3期)2017-05-18
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
船海工程(2015年4期)2016-01-05
