
基于数字图像的隧道表观病害识别方法研究
2019-03-12 08:58何国华刘新根陈莹莹
重庆交通大学学报(自然科学版) 2019年3期
何国华, 刘新根,陈莹莹,杨 俊,钟 北
(1. 贵州高速公路集团有限公司,贵州 贵阳 550004; 2. 上海同岩土木工程科技股份有限公司,上海 200092;3. 上海地下基础设施安全检测与养护装备工程技术研究中心,上海 200092)
0 引 言
截止2016年底,全国公路隧道为15 181处/14 039 km,其中特长隧道815处/3 622 km,长隧道3 520处/6 045 km。随着我国西南地区的高速公路的快速发展以及国家“一带一路”的发展战略,我国的高速公路隧道建设及运营规模仍有巨大的发展空间。公路隧道在建设及营运过程中,由于隧道穿越复杂地质环境、设计参数不匹配、施工质量问题等因素影响,隧道渗漏水、开裂、错台、材料劣化、剥落剥离等病害突出,对隧道使用性能和正常运营构成了极大的安全隐患,为保证隧道运营安全,须定期或不定期进行检查和维护。
传统的公路隧道检测方式多以人工巡检或人工测量为主,存在速度慢、耗时、效率差,成本高,对作业人员技术要求高,不能准确表达和记录病害的形态和性质,单点测量,检测数据覆盖性差等诸多缺点。此外,运营期时还需要封道检测,极易导致交通阻塞。
随着信息处理技术和传感器技术的进步,针对隧道结构各种病害损伤情况的评价,有条件开发使用各种检测仪器。目前,对于隧道衬砌结构图像采集,多采用稳定性强、拍摄速度快、拍摄精度高的工业相机。采用多台工业相机组成相机阵列,连续、快速、非接触拍摄图像覆盖整个隧道断面。这将会产生较大的数据量,这就要求检测过程中通过图像处理准确、自动识别病害的位置。
公路智能检测车可以高效地检测路面病害,路面平整度和车辙检测[1]。然而,由于隧道衬砌结构背景的复杂性,基于图像进行病害处理的技术相对困难一些,国内外已经开展了不少相关研究内容。
F. ROLI[2]提出了CTA(conditional Texture Anisotropy,简称CTA)测度的概念。T. S. NGUYEN等[3-4]提出一种基于条件纹理异向性(CTA)量准则的路面裂纹检测算法,该种算法能够有效的检测出路面裂纹,并通过后向神经网络能够有效的对裂纹、连接线缝及桥接缝进行有效的分类及识别;并基于公路裂缝的连续性及裂缝灰度级较低的特性提出了一种快速高效的裂缝检测方法,该方法能够检测到水平、竖直、网状等形状的裂纹。H. OLIVEIRA等[5]提出一种基于图像动态阈值选择及非重叠的裂缝分块图像熵的裂缝检测分类方法,该方法能够在一定程度上对水平裂缝路面、竖直裂缝路面、杂乱裂缝路面及完好路面进行正确分类,表明了非重叠分块图像熵可以作为公路裂缝图像的裂缝特征来进行使用。刘学增等[6]以隧道衬砌渗漏水面积为检测目标,提出一种包括去噪、锐化、分割、修正的一整套数字图像处理算法。豆海涛等[7]针对渗漏水红外图像特征,利用MATLAB编写的程序能够提取热图像中的渗漏水面积等信息,为隧道渗漏水车载动态检测软件系统开发奠定基础。王平让等[8]提出一种基于图像局部网格特征的隧道衬砌裂缝自动识别方法。王耀东等[9]提出了一种全局与局部相结合的预处理算法,以及基于连通区域的多级滤波算法,能较好地实现地铁隧道表面裂缝的检测。朱力强等[10]利用Mask匀光等预处理算法改善隧道图像的质量,而后基于模板、Hough变换、SVM等分析方法对隧道表面裂缝图像各成分进行提取分析,提升了裂缝图像识别准确度。
1 裂缝图像识别
由于混凝土材料的不均匀性,正常表面的纹理也不均匀。因此,所采集的裂缝图像背景颜色本身有较大的变化。另外裂缝严重程度不同,其长度、宽度、深度也不同。如果裂缝中有与背景颜色相近甚至更亮的比较大的颗粒,也会导致裂缝图像颜色的变化,但总的来说,裂缝图像比正常混凝土表面的暗。代表裂缝的像素数量远远小于代表背景的像素数量。正常表面的灰度值与裂缝的灰度值有部分重叠。对于由CCD摄像机拍摄的含有裂缝的灰度图像常常包括非均匀光照和成像系统所形成缓慢变化部分,即图像由中间亮至周围暗的变化,是一个频率低幅值高的信号[2]。基于裂缝的狭长型几何特征,可以获取沿裂缝方向的灰度剖面特征及沿裂缝长度方向上的裂缝宽度变化特征[3]。
综上,裂缝的图像特征有:①裂缝图像比周围背景区域颜色暗;②裂缝图像像素个数占少数;③裂缝边缘与正常表面灰度值有重叠;④裂缝呈现频率低幅值高的特征;⑤裂缝几何因子结构特征为狭长形。
CTA测度主要融合了以下3方面的裂缝特征:①裂缝处灰度级较周围要低;②裂缝往往具有细长连续的特点;③裂缝在每一处均具有一个主方向,该方向常常是变化的。
笔者基于裂缝分布处灰度值较低,并且裂缝在某个方向上呈现出连续性等特征进行裂缝检测,检测流程如下。
步骤1):采用高斯低通滤波对图像进行预处理,可减少隧道衬砌防火层颗粒、灰尘等对后续识别效果的影响;其中原图记为ImageOrg,预处理后图像记为Image。
步骤2):由于实际隧道环境多变、补光等问题,会导致图像光照不均匀;设定阈值无法满足图像的多变性等问题,需将图像进行分块处理。经过大量实验发现,将区域设为50*50(pixel)效果较好。
步骤3):选定ROI(Region Of Interest,感兴趣区域,这里指选定区域)区域,计算图像的CTA值,依据裂缝在图像中像素数较少,且裂缝上的CTA值较大这一特点,利用CTA值概率密度分布函数,将累计分布值大于th(th一般设为0.75)的设为1,否则设为0,记为CTA_ROI。
步骤4):利用Sobel边缘检测方法,获取ROI区域内图像的边缘,裂缝实际上亦为狭长型区域病害,而边缘检测只获取边界,而CTA值计算得到的是整个区域,若要将两者进行比较,需要将边缘检测结果进行形态学膨胀,其形态学结构元尺寸可通过计算裂缝边界宽度来获取。通过膨胀后图像记为Sobel_ROI。
步骤5):计算CTA_ROI和Sobel_ROI的相关性,相关性计算方法如下:

(1)
coef=S/(M*N)
(2)
式中:M,N分别为ROI区域的高度和宽度;S为值相同的点统计和。
步骤6):若步骤5)中计算的coef > th2,将ROI区域的值设为CTA_ROI,反之为0(即目标为1,背景色为0)。其中th2的值通常设为0.5,这是由于当背景复杂时,若th2的值较大,将会滤掉病害信息,对病害识别造成严重的影响;同时将子图像包含目标较小的区域也设为0。
步骤7):根据步骤2)中设置的区域尺寸大小,对Image进行遍历,利用步骤3)~步骤6)得到图像ImageBw。
步骤8):ImageBw为二值图像,去除面积较小区域,但是依然存在背景干扰、不连续等情况,需进一步处理。首先,获取每个联通区域的外接椭圆,若联通区域非单一分支,可根据节点,将区域分段,获取其长度和宽度,若长度较短或长宽比较小,即可认为不是裂缝;然后,利用裂缝比正常混凝土表面暗、灰度变化较快这一特点,去除其他干扰;其次,利用裂缝区域灰度为峡谷型,即裂缝区域暗,而周边亮且两边亮度差值较小这一特点,将管线等线性干扰去除。
步骤9):连接并细化裂缝。将角度相近、距离较近的裂缝进行连接,在连接过程中,以裂缝的端点作为起点向两端延伸,可利用步骤3)~步骤6),对局部进行识别,获取裂缝位置,对于干扰区域,可利用步骤8)中的已删除的区域进行进一步剔除。将已识别区域中心较暗区域进一步提取,可获取最终的裂缝识别位置。
图1为裂缝图像检测识别流程,图2为具体的识别过程。
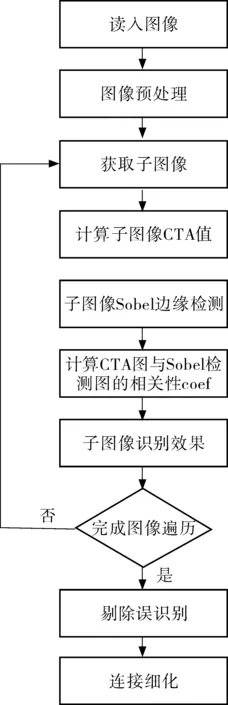
图1 裂缝图像检测识别流程Fig. 1 Crack image detection identification flowchart
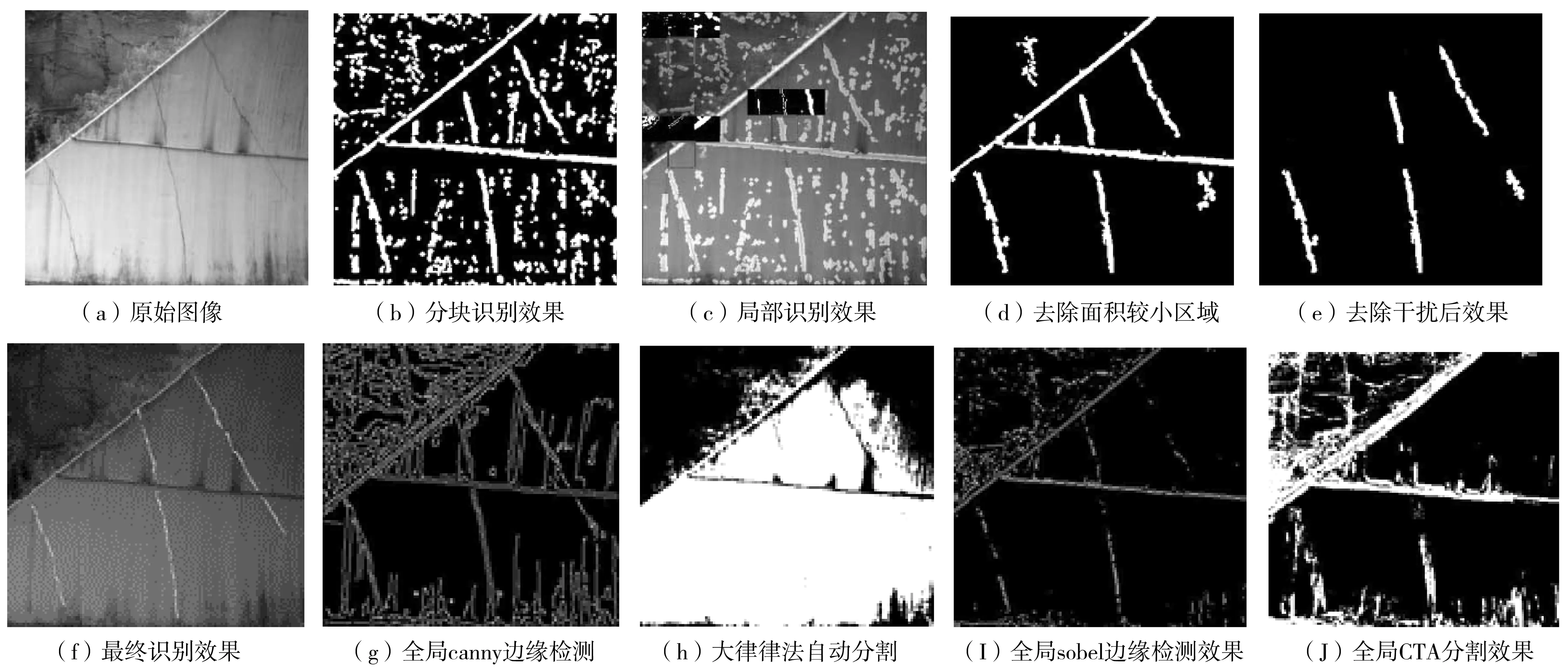
图2 裂缝图像识别效果1Fig. 2 Crack image recognition effect 1
图2详细地展示了裂缝识别的每个步骤,图2(b)为分块处理效果,图2(c)展示了3个不同区域的分块处理结果,其中1为平坦背景,2为强干扰,3为真正的裂缝区域,小图分别展示了CTA效果图、Sobel边缘检测效果以及最终生成效果图,可以清楚地看出,包含裂缝区域具有明显的线性结构。图2(d)和图2(e)为步骤8)的处理效果。同时在图2(g)~图2(J)中展示了全局canny边缘检测效果、大津律法自动分割效果、全局sobel边缘检测效果和全局CTA分割效果,实验表明,采用分块处理,将CTA测度算法和Sobel边缘结合,再利用裂缝本身特征,可准确识别裂缝。图2(f)以及图3~图4为笔者提出方法的识别效果,结果表明笔者提出算法比其他方法更加准确。
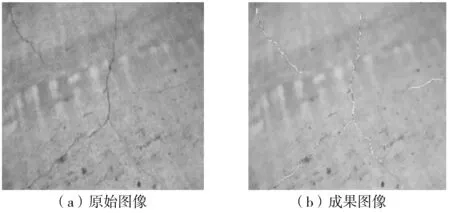
图3 裂缝图像识别效果2Fig. 3 Crack image recognition effect 2
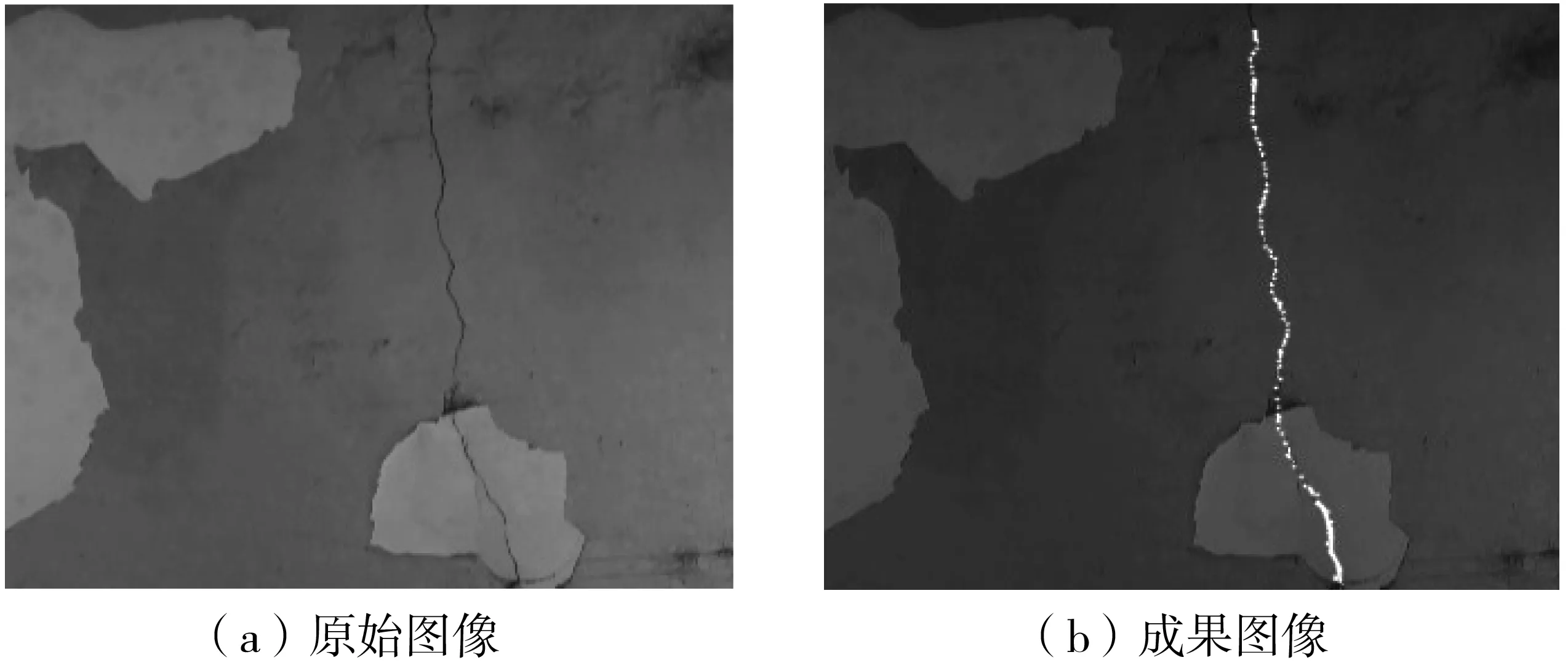
图4 裂缝图像识别效果3Fig. 4 Crack image recognition effect 3
2 渗漏水图像识别
隧道渗漏水特征主要包括了以下几个方面:①由于渗漏水的扩散作用,渗漏水区域往往呈现块状;②渗漏水区域相对于非渗漏水区域往往亮度较暗;③由于受重力影响,渗漏水区域常常是呈现由上至下扩散的方向性特征。
因此,考虑渗漏水污染的衬砌面区域与未受渗漏水污染的衬砌面区域特征相异性,利用渗漏水区域呈现块状的特点,并根据特征3可知,渗漏水区域的像素相对于未污染的区域,体现着较明显方向性。对于未污染区域的任何一个像素而言,考虑其所在位置的m个方向上的信息,对于区域内的像素而言,若该区域内的像素有着较强的一致性,故在各个方向上均具有较相近的性能(此处所说的相近性能是指:该像素的方向性在该m个方向上均具有相近的概率值)。依据渗漏水图像的3个特征,采用改进的CTA算法对图像渗漏水区域进行快速识别,识别方法如下:
1)计算待分割图像的梯度图像,并将原图像与梯度图像叠加,形成细节增强图像。
2)提取图像中的某个像素点P,考虑以该像素点为中心,取半幅宽为d,以2×d+1为边长的正方形区域,分别考虑m个方向(可取0°、45°、90°、135°)上包含在正方形以内的像素点的特征,和该正方形所在区域所有像素特征的平均特征属性进行比较,依据未受渗漏水污染的区域像素具有不明显的方向性,而受渗漏水污染的区域像素具有更明显的方向性的特征,则能够实现对非渗漏水区域与渗漏水区域的分割。
①在区域检测时,我们修改了CTA值的形成准则,改写为
(3)
(4)
其中:
(5)
(6)
(7)
(8)
(9)

当前像素P具有较强方向性时,则min(P(Xl))值所相应的方向即为当前像素的方向,且该值较小,同时方差较大,则该像素的CTA值较小;若当前像素P不具有较强的方向性,则min(P(Xl))值较大,与此同时方差较小,CTA值则具有较大值。
②依据正方形包围的局部信息,动态地调整平均特征属性,可完成对区域分割,并且不存在对图像全局特征属性的依赖。
3)计算图像中每一个像素的CTA值,形成CTA矩阵;对CTA矩阵进行双阈值划分处理,得到关于渗漏水区域与未渗漏水区域的分割图像。
4)对CTA阈值处理后的图像进行形态学处理,去除面积较小的杂点,对边界进行光滑处理,即可获得渗漏水病害区域。
部分渗漏水图像识别效果如图5~图7。

图5 渗漏水图像识别效果1Fig. 5 Seepage water image recognition effect 1

图6 渗漏水图像识别效果2Fig. 6 Seepage water image recognition effect 2
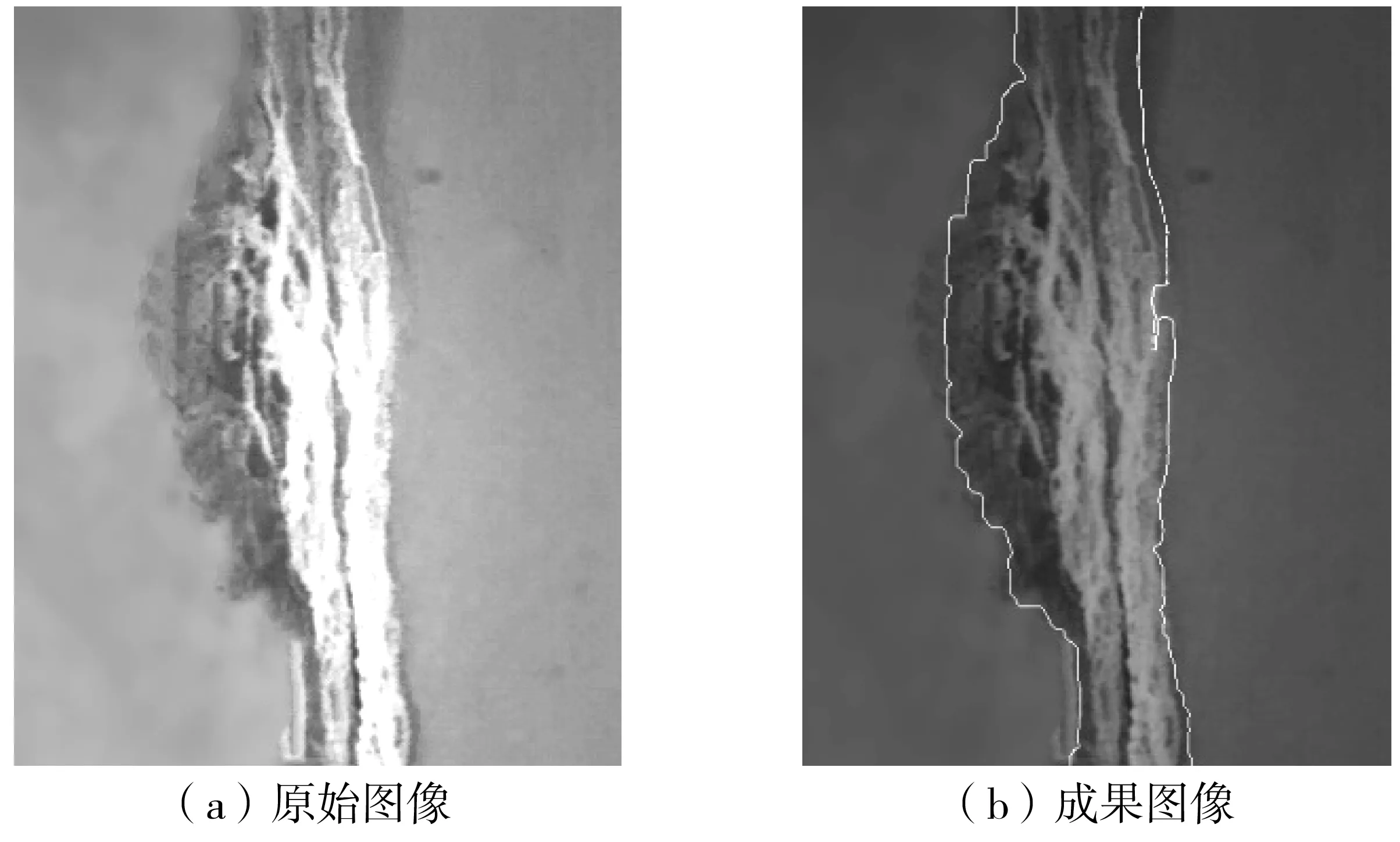
图7 渗漏水图像识别效果3Fig. 7 Seepage water image recognition effect 3
图5(e)展示了改进CTA算法的处理结果。改进后的CTA图像,边界值较小(二值图为0),通过大量的实验表明,采用改进的CTA算法,不需要设定阈值,即可获取渗漏水的边界,且可以过滤边界不够明显的区域。
笔者研究成果已集成于同济曙光公路隧道检测车数据处理系统中,处理超过3 000万张图片,病害有效识别率达80%以上。
3 结 论
笔者基于数字图像分析技术,给出了隧道结构快速检测车的数据采集方法与隧道结构表观病害的图像识别算法,得出以下结论:
1)数字图像处理技术为公路隧道结构表观病害快速自动化识别检测提供了一种新的途径。
2)隧道衬砌裂缝的图像检测能够实现大部分裂缝的自动检测,但由于复杂背景干扰,也可能存在误检情况,因此在未来实际应用中的后续算法需要持续改进。
3)基于改进CTA算法,渗漏水检测算法执行效率较高,检测区域较好,有效解决了隧道衬砌渗漏水区域的自动检测问题。在实际工程中,对于渗漏水区域灰度图像的灰度值范围值,可以通过预先控制补偿光照强度来保证渗漏水区域灰度图像的灰度值处于某个指定的范围。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
小哥白尼(军事科学)(2022年2期)2022-05-25
天津医科大学学报(2021年1期)2021-01-26
电子制作(2019年16期)2019-09-27
红领巾·萌芽(2019年8期)2019-08-27
中国交通信息化(2019年4期)2019-07-13
电子制作(2018年19期)2018-11-14
电子制作(2018年14期)2018-08-21
中国与非洲(法文版)(2017年10期)2017-11-23
自动化学报(2017年5期)2017-05-14
