
基于神经网络的汽油车三效催化器老化诊断
2019-03-12 05:15刘洋潘金冲张云龙帅石金
车用发动机 2019年1期
刘洋,潘金冲,张云龙,帅石金
(清华大学汽车安全与节能国家重点实验室,北京 100084)
为应对日趋严峻的环境问题,集成三效催化转化器(Three-Way Catalytic Converter,TWC)和汽油机颗粒捕集器(Gasoline Particulate Filter,GPF)的后处理系统已经逐渐成为汽油车的标准配置。后处理系统在使用过程中可能发生故障,这不仅会影响发动机管理系统(Engine Management System,EMS)的正常运行,也会在很大程度上造成车辆排放和动力性能恶化。根据《轻型汽车污染物排放限值及测量方法(中国第六阶段)》中的要求,汽油车需要具备车载诊断系统(On-Board Diagnostics,OBD)的功能,后处理系统相关传感器和部件的诊断正是其中重要的一环。
TWC老化失效是OBD法规中要求诊断的主要故障之一,到目前为止已经发展了近二十年。从总体趋势来看,诊断条件由稳态、固定阈值拓展到非稳态、动态阈值[1-3],诊断策略由基于传感器信号过渡到基于经验或机理模型的方法[4-6]。目前TWC老化诊断主要面临建模困难、标定工作量大等问题。
近年来,随着“深度学习”概念的提出,有关神经网络的研究和应用在各个领域内迎来了新的热潮。基于神经网络的智能化方法在解决复杂故障诊断问题时具有其独特优势[7-9]。本研究同时应用反向传播神经网络(Back Propagation Neural Network,BPNN)和深度置信网络(Deep Belief Network,DBN)进行TWC老化诊断策略的开发和验证。
1 基于神经网络的故障诊断方法
1.1 反向传播神经网络
BPNN分为工作信号正向传递和误差信号反向传递两个子过程。其结构由一个输入层、一个输出层还有若干隐层组成,每层均含有一定数量的神经元节点。1989年Robert Hecht-Nielsen通过数学方法证明了单隐层BPNN可以逼近闭区间内的任意连续函数[10],从而表明了BPNN在解决非线性分类问题上的优势。
以一个常见的单隐层BPNN为例(见图1),每一层节点的输入仅来自于前一层节点的输出。输入信号先前向传播到隐层节点,经过激活函数映射后,再将隐层的输出信息传播到输出节点,最后得到输出结果。该过程可用如下公式描述:
(1)
xj=f(Sj)。
(2)
式中:xi为第i个神经元节点的输出;xj为第j个神经元节点的输出;wij为节点i和节点j的权值;bj为节点j的偏置;f为激活函数,一般选择sigmoid或线性函数。

图1 BPNN结构
在BPNN中,误差函数表达为
(3)
式中:yk为神经网络的理论输出;yk′为神经网络的实际输出。
误差信号反向传递的过程即BPNN的训练过程,其基于Widrow-Hoff学习规则,沿着相对误差平方和的最速下降方向,连续调整网络的权值和偏置,使得误差函数达到最小值。其调参顺序由输出层到隐层开始,由隐层到输入层结束。
1.2 深度置信网络
DBN是一个概率生成模型,由多伦多大学的Geoff Hinton提出[11]。DBN由若干受限玻尔兹曼机(Restricted Boltzmann Machine,RBM)串联组成,每层RBM的输出将作为下一层的输入。
RBM的结构见图2,其由一个显层和一个隐层构成,两层若干个神经元之间均为双向连接。

图2 RBM双向连接结构
类似BP神经网络,RBM的层级参数有权重w、显层偏置b和隐层偏置c。RBM的能量公式为
(4)
式中:vi为第i个显层神经元的取值;hj为第j个隐层神经元的取值;wij为两层之间的权值;bi和cj分别为显层和隐层的偏置,表示在每一个可见节点的取值和每一个隐层节点的取值之间都存在一个能量值。隐层神经元和显层神经元被激活的概率为
P(hj|v)=σ(cj+∑iwijvi),
(5)
P(vi|h)=σ(bi+∑jwijhj)。
(6)
式中:σ为sigmoid函数,也可以根据情况选择其他函数。
RBM的工作原理由式(7)所描述,其中x为输入向量,μ为[0,1]内的随机数,由此可以得到隐层/显层的每个神经元的激活结果。
hj=1,P(hj|x)≥μ;hj=0,P(hj|x)<μ。
(7)
vi=1,P(vi|x)≥μ;vi=0,P(vi|x)<μ。
(8)
RBM采用对比散度算法进行网络的训练[12],具体步骤如下:
1) 令初始值v0=x0,由式(5)对所有隐层神经元计算得到P(h0=1|v0),由gibbs采样原理从中抽取h0~P(h0|v0)。
2) 对所有显层神经元,按照式(6)计算得到P(v1=1|h0),从中抽取v1~P(v1|h0)。
3) 通过v1再次计算隐层中每个神经元被激活的概率,得到P(h1=1|v1)。
4) 对RBM参数进行更新:
w←w+λ[P(h0=1|v0)v0T-
P(h1=1|v1)v1T];
b←b+λ(v0-v1);
c←c+λ[P(h0=1|v0)-P(h1=1|v1)]。
从DBN的结构组成和算法原理中可以看出其具有强大的特征提取能力,近年来对于DBN的实际应用也不断证实了这种观点[13-14]。当然,DBN本质上是深层的神经网络,其对模型训练和求解的硬件载体相对于BPNN有更高的要求。
1.3 神经网络诊断流程
神经网络的故障诊断本质上是应用神经网络的特点解决分类问题,其具体流程见图3。
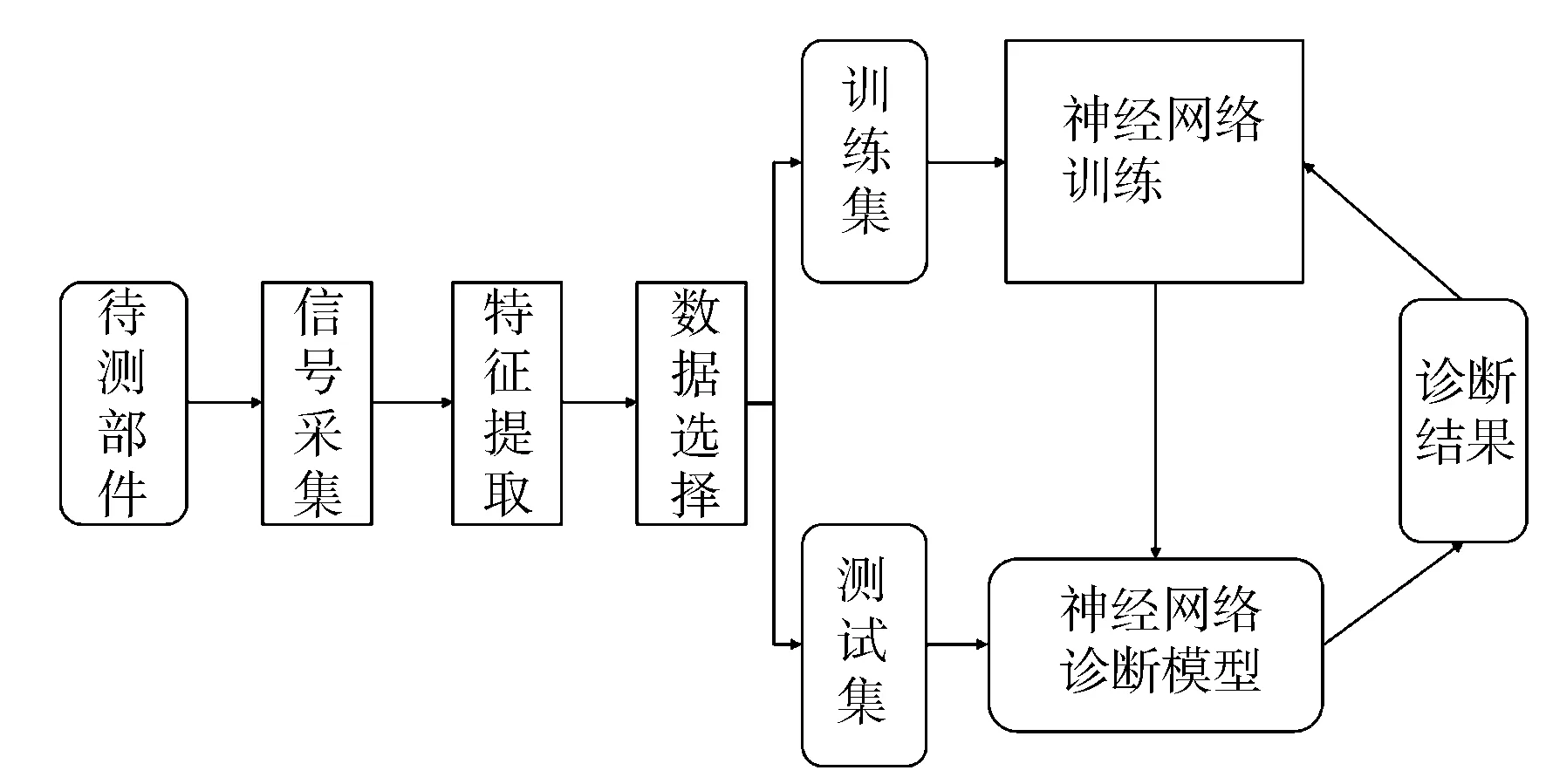
图3 神经网络诊断流程
首先,需要通过传感器采集被诊断部件的相应信息,为了使诊断结果适应于不同背景,需要保证提供原始数据的部件与其他同类部件之间具有良好的一致性。同时,为避免大的数据波动,需要保证采集工作在较稳定的状态下进行。
其次,需要对原始数据进行预处理,包括数据筛选和特征提取两部分。其中特征提取过程为神经网络提供了重要的输入数据集,应保证提取的特征向量之间拥有较高的非相关性,并且需要根据具体情况对特征数据进行归一化处理。
随后,从总的特征数据中提取训练数据集进行神经网络的训练。训练过程将离线进行,不断调节相关训练参数优化训练时间和收敛结果。
最后,提取测试数据集并对训练完毕的神经网络诊断模型进行验证。根据诊断结果精度,对上述各环节进行反馈和调整。
2 TWC老化诊断
2.1 TWC老化诊断原理
氧传感器是TWC系统的重要电子部件,一般在TWC前后各布置一个。目前常用的氧传感器有两种类型,分别为阶跃型氧传感器和宽氧传感器,两者输出特性曲线不同。为便于对信号进行对比,TWC前后氧传感器均使用阶跃型氧传感器。
TWC工作时的机理主要由以下反应描述[15]:
(9)
对于新鲜的TWC,其中的铈氧化物具有良好的储氧能力,当发动机的工作状态偏离理论空燃比(偏稀或偏浓时),TWC将对这种变化作出响应,进行相应的储氧和放氧过程,从而使得TWC后端的排气始终保持在理论空燃比左右(见图4),此时TWC的转化效率最高;由于高温、催化剂中毒等原因,TWC逐渐老化,其储氧能力不断下降,即最大储氧量不断减少,此时TWC后的排气不再维持在理论空燃比,而是产生一定程度的波动(见图5),此时TWC转化效率下降;当TWC老化达到临界状态时,催化剂基本丧失储氧能力,TWC前后氧传感器的电压信号将趋于一致(见图6)。

图4 新鲜TWC前后氧传感器信号对比
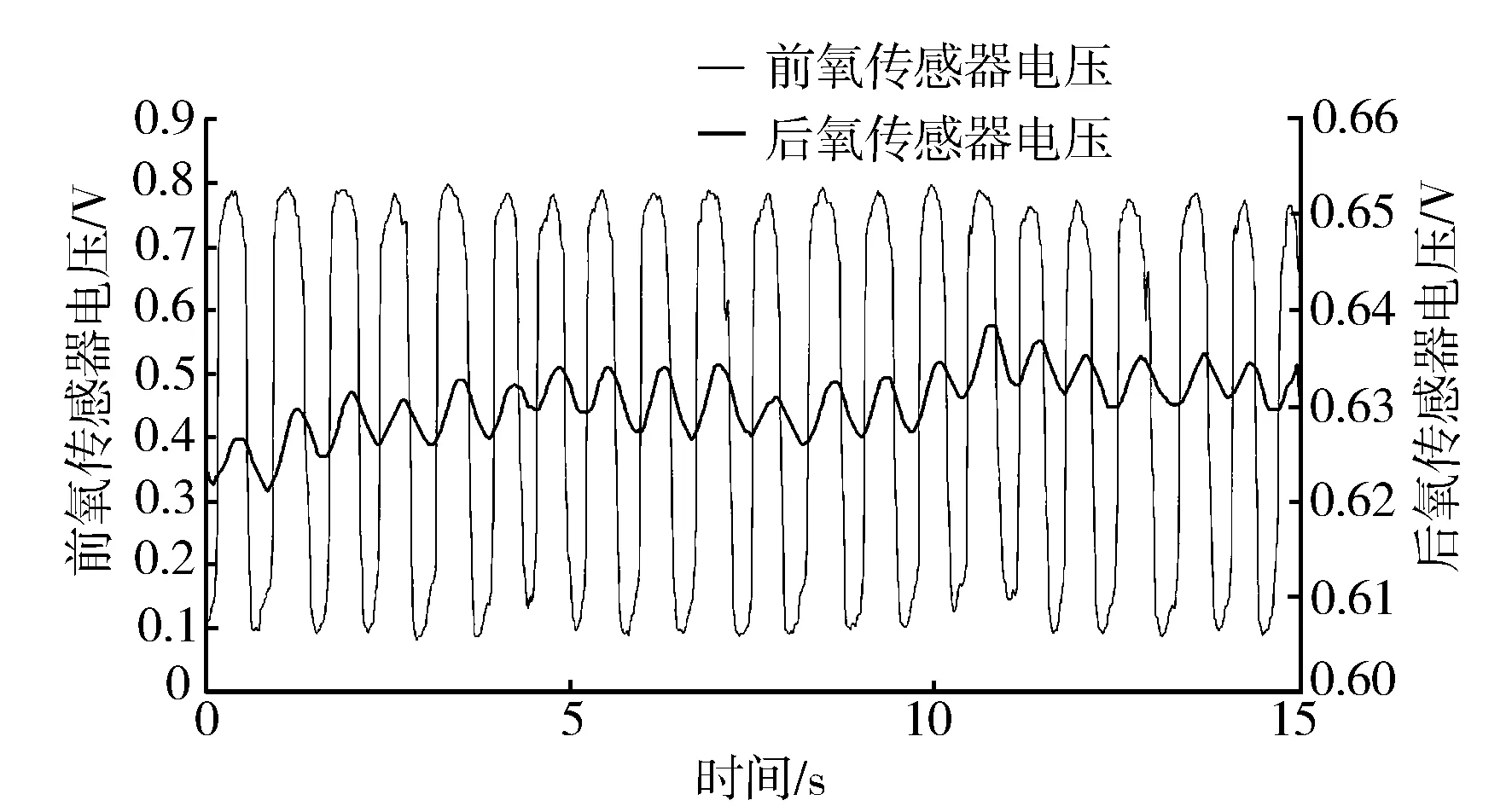
图5 老化TWC前后氧传感器信号对比

图6 临界TWC前后氧传感器信号对比
常规的TWC老化诊断策略采用振幅模型化法[16],通过大量试验建立TWC老化的经验模型或储氧量动态模型。在实车运行中用实际采集到的后氧传感器信号与模型预测的后氧信号作对比,结合阈值判断TWC的老化程度。这种诊断策略的主要问题是动态模型建模复杂,且在各稳态工况下标定相关参数的工作量很大。而采用神经网络开发TWC诊断算法的优点在于:神经网络本质上是一种“黑箱”模型,在建模过程中已知TWC系统的输入输出参数就可以拟合出相应的表达式;基于网络训练的调参过程只需要手动设置初始参数,其余过程完全由算法自动执行。
2.2 基于BPNN的TWC老化诊断算法
构建神经网络数据集的原始数据来源于TWC实车试验数据,试验用车参数见表1。

表1 试验用整车参数
催化器老化在天津索克台架上按照GM875循环进行,得到16万km老化和临界老化的TWC样件。在实车上分别安装连同新鲜TWC在内的3种不同老化程度的样件,运行NEDC循环。以50 Hz采样频率对TWC前后氧传感器信号进行采集,部分结果见图7。

图7 NEDC循环临界TWC前后氧传感器信号采集
后氧传感器的信号波形可以直观地表现TWC的老化情况,故用平均值和标准差2个时域参数对其进行描述。前氧传感器的电压信号实质上是发动机所有工况信息的集中体现,也需要提取其波形中的信息。为了消除前氧传感器信号的不确定性影响[17],将前后氧传感器的均值和标准差做差,最终以前后氧传感器均值的差值、前后氧传感器标准差的差值、后氧传感器的均值和后氧传感器的标准差作为故障特征输入,分别记为UFR_AVG,UFR_SD,UR_AVG和UR_SD。
以1 s为单位对原始数据加时间窗分段处理,对于得到的每段数据求算4个时域参数作为输入。为了取得较好的训练结果,随机地抽取每一种TWC状态的时域参数组合。最终构成2 400×4的输入数据集,包含3种TWC老化状态各800组。部分输入数据集见表2。

表2 TWC老化诊断输入数据集(部分)
为定量描述三种TWC的老化状态,对其进行向量形式的编码,结果见表3。故障向量与输入一一对应,构成总行数相同的输出数据集。

表3 TWC老化故障编码
将数据集分为训练集和测试集,根据神经网络数据集分类的常规要求,按照3∶1比例选取1 800组作为训练样本,600组作为测试样本。根据原始数据计算的输入参数可能在[0,1]范围之外,故需要对训练数据和测试数据进行相同算法的归一化处理,本研究中采用的归一化算法如下:
(10)
式中:x和y分别为归一化前和归一化后的结果;xmax和xmin分别为x中的最大值和最小值。
神经网络训练参数的选取将对网络训练和测试结果造成较大影响,本研究重点考虑隐层节点数、激活函数、学习次数、收敛精度和学习率。经过大量试验,最终选择含有3个隐层的神经网络作为诊断模型的基本结构,其中输入层含4个节点,输出层含3个节点,三个隐层各含50,10,10个节点;激活函数选择logsig,学习次数设置为5 000次,收敛精度取0.01,学习率取0.01。神经网络及训练结果见图8至图11。

图8 神经网络结构

图9 神经网络训练曲线

图10 神经网络训练状态

图11 网络训练回归曲线
从神经网络的训练结果看出,当学习次数达到设定的上限5 000次时,最优收敛误差为0.082 701。在前500次学习过程中,学习曲线的收敛速度很快,但随着学习次数的增加,收敛速度趋于平缓。该趋势表明此时继续增加学习次数对提升收敛的意义不大,也证明了在给定的数据集下,神经网络的训练结果总存在一个上限。过度增加学习次数容易出现过拟合现象。
使用测试集对训练完毕的BPNN进行验证,部分测试输出见表4。由表4可知,由于新鲜和老化TWC的后氧传感器信号较为相似,所以两者中部分输出向量的对应分量存在数值接近的情况,导致误诊发生,而临界TWC输出向量的对应分量则区分度明显。反映到实际诊断精度上,3种不同状态TWC的总体诊断精度为79.52%,新鲜TWC的诊断精度为76.15%,16万km老化TWC的诊断精度为66.55%,临界TWC诊断精度则为95.85%,完全符合其故障向量输出分布情况。

表4 TWC老化诊断结果(部分)
2.3 基于DBN的TWC老化诊断算法
对于在实际工况下运行的TWC系统,基于BPNN的诊断方法将面临两方面的问题:一方面是实际工况多变而复杂,氧传感器的电压信号随老化状态的变化不再像稳态工况下那么直观,故障特征值的维度将提高;另一方面,按照上述特征提取方法进行数据处理必然会在一定程度上占用控制器的计算资源,影响诊断的实时性。而且这种方法本质上也基于经验,其可靠性在复杂诊断条件下难以保证。由于DBN在特征提取能力方面的优势,对基于DBN的TWC诊断模型进行训练和验证。
DBN的模型机制使其在训练数据方面相比于传统神经网络拥有更大的需求,由于实际获得的原始数据往往有限,所以需要采用深度学习中常用的数据增强[18]对DBN数据集进行扩充,这里选择在原始数据集上叠加随机噪声的方法。对采集到的前后氧传感器原始数据分别进行2 s的时间加窗预处理,得到1 200×200的输入数据集;采用awgn函数分别加入信噪比为20 dB,30 dB,40 dB和50 dB的噪声,最终将数据集扩充为6 000×200。
DBN的训练过程包含了预训练和微调两部分。首先初始化DBN各层参数;然后输入训练集对每层RBM进行训练和堆叠,完成DBN的训练;最后DBN通过dbnunfoldtonn函数将预训练参数传递给BP神经网络进行微调,在预训练结果收敛到目标值附近后,采用BP算法进一步逼近。DBN参数设置与BPNN主要不同在于对预训练参数的设置,并且由于数据量的增大,引入了batchsize(批大小)变量对数据进行分组训练。经过大量的网络训练试验,选取最优的参数组合(见表5)。

表5 DBN参数设置
使用测试集对训练完毕的DBN神经网络进行验证,计算诊断精度并与BP神经网络进行对比,结果见表6。可见,基于DBN的TWC老化诊断算法在简化了特征提取过程的同时,精度相比于基于BP神经网络的诊断精度提升了11.23%,达到90.75%。但作为代价,训练时间增加为原来的7.76倍,模型运算次数也增加为原来的37.06倍。在实际汽油车TWC诊断上的应用,应当权衡精度、时间成本与单片机性能三者,进行算法的合理选择。
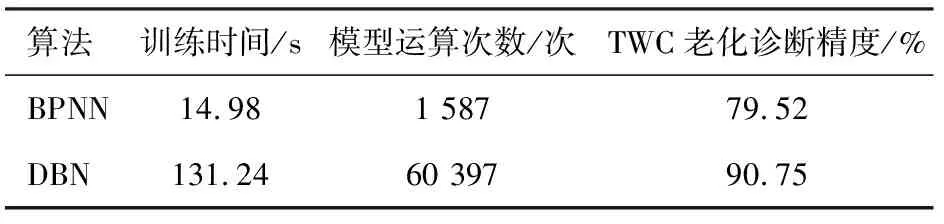
表6 基于神经网络的TWC老化诊断算法对比
3 结束语
基于BPNN开发了TWC老化诊断算法,根据实车循环工况数据,手动提取4种故障特征建立数据集。在合理的网络训练参数设置下,3种TWC老化状态的诊断精度达到79.52%。基于DBN对TWC老化诊断算法进行改进,采用数据增强的手段得到网络训练需要的数据集。在大量试验的基础上,分别设置DBN预训练参数和调优参数,最终诊断精度达到90.75%,提升11.23%,证明基于DBN的神经网络诊断算法相比于传统BPNN算法具有更好的表达能力,并且简化了手动提取故障特征的过程;但其需要消耗数倍于BPNN的训练时间成本和模型计算量,故需要根据实际诊断需求辩证地选择算法。基于神经网络的TWC老化诊断算法建模简便,具有较高的精度和泛化能力,且对工况瞬态变化不敏感,网络离线训练和在线诊断的结合在更为严格的排放法规实施下具有很好的应用前景。
猜你喜欢
艺术生活-福州大学厦门工艺美术学院学报(2022年4期)2022-09-22
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年11期)2022-07-15
煤气与热力(2022年2期)2022-03-09
北京航空航天大学学报(2021年4期)2021-11-24
计算机应用与软件(2021年10期)2021-10-15
小型微型计算机系统(2020年5期)2020-05-14
华东师范大学学报(自然科学版)(2019年3期)2019-06-24
软件(2017年6期)2017-09-23
智富时代(2016年12期)2016-12-01
