
压路机作业的主动安全控制技术研究
2019-03-08 09:18:34陈步童李胜永张智华王玉柱
筑路机械与施工机械化 2019年2期
陈步童,李胜永,张智华,王玉柱
(1.南通航运职业技术学院,江苏 南通 226010; 2.中国船舶重工集团公司第704研究所,上海 200031)
0 引 言
压路机是修建机场、铁路、公路、港口等交通基础设施的压实机械,多采用全液压驱动[1-2]。现场施工作业过程中,由于压路机操作人员缺乏相关专业知识和异常情况应变能力,对可能发生的危险抱着侥幸心理违章作业,加之施工现场交通复杂,故压路机伤人和碰撞事故频发,造成人员伤亡和财产损失。因此,加强压路机作业过程主动安全控制技术研究尤为重要。
1 振动压路机行驶液压系统工作原理
双钢轮振动压路机行驶液压系统[3-4]如图1所示,采用一泵双马达并联闭式回路,最大工作压力为40 MPa。系统的行走泵采用斜盘式轴向变量柱塞泵,行走泵通过管路与前、后行走马达相连。前、后驱动采用斜轴式轴向柱塞马达与减速机组合。压路机行驶和作业过程中,手动伺服阀控制行走泵的斜盘摆动方向和摆角大小,使行走泵输出的高压油的流量大小和流动方向随之改变;行走马达伺服阀控制变量柱塞马达(行走马达)斜轴摆角大小,使前后行走马达在最大排量和最小排量之间切换,以满足压路机行驶和作业过程中不同行驶速度的要求[5-6]。
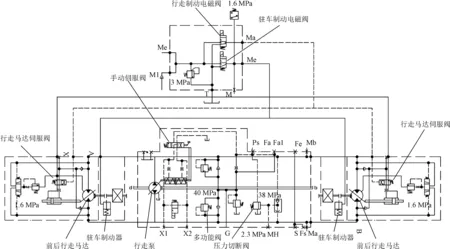
图1 双钢轮振动压路机行驶液压系统
若压路机作业时突然过载,行走泵的输出油压会迅速上升。当系统工作压力超过40 MPa时,多功能阀迅速开启,双向安全溢流,行走泵直接卸荷;压力切断阀使排量伺服油缸向排量减小方向移动,直至自动控制行走泵的排量为零;前、后行走马达配有冲洗阀,以便将主油路低压侧部分液压油冲洗至油箱,把闭式系统部分热油排出。压路机作业时频繁换向、调速,导致前、后行走马达背压较大,其溢流阀会自动卸荷,压路机的行驶平稳性、被压层的压实均匀度及密实度、操作人员的舒适性均有所提高[7]。
2 制动系统工作原理
为了适应不同工况,双钢轮振动压路机上设有工作制动和紧急制动[8]。工作制动是为实现压路机压实作业时前进、倒退、换向等工况的停车转换:将操纵手柄由任一工作位置拉回中位,使行走泵的斜盘角度减少至0,前后行走马达行走泵的输入流量减小至0,前后行走马达因闭锁停止工作,压路机实现停车。紧急制动则是将驻车制动阀紧急制动按钮直接按下,使驻车制动阀断电,进入前后行走马达行走泵、前后行走马达驻车制动器的压力油被切断,常闭式前后行走马达行走泵、前后行走马达驻车制动器在其弹簧力的作用下啮合制动片,实施紧急制动;与此同时,进入手动伺服阀的油路也被切断,行走泵的斜盘倾角不变,行走泵无压力油输出,压路机实现驱动和制动互锁[9-10]。
3 作业主动安全控制系统
3.1 控制系统总体布置
为提高压路机作业过程的主动安全性,设计制作了一套压路机作业过程主动安全控制装置,该装置由橡胶减震垫、中央控制单元、485通信线、超声波信号处理器、超声波信号线、超声波传感器、12 V电源线、行走制动电磁阀、驻车制动电磁阀、电磁阀控制线等组成,具体连接关系如图2所示。
3.2 控制系统原理
当前、后超声波传感器前侧有人通过或存在障碍物时,前、后超声波信号处理器将传感器检测到的信号处理后传送给中央控制单元,中央控制单元同时向行走制动电磁阀和驻车制动电磁阀发出指令,行走制动电磁阀和驻车制动电磁阀即刻断电,行走泵变量机构使其斜盘回到零位,行走泵停止向前后行走马达供油,使其停止工作;与此同时,进入前后行走马达制动器的压力油因前后驻车制动电磁阀断电而被切断,常闭式前、后行走马达制动器在弹簧力的作用下啮合制动片,实施紧急制动,最终钢轮压路机实现主动安全停车[11]。控制系统逻辑关系如图3所示。
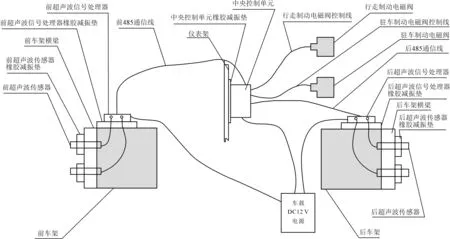
图2 控制系统总体布置
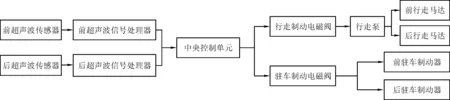
图3 控制系统逻辑关系
3.3 控制系统硬件结构
控制系统主要硬件由超声波传感器、超声波信号处理器、中央控制单元、制动电磁阀等组成,其中超声波信号处理器由超声波发射器、超声波接收器、STC89C52RC单片机、485通信模块、电源转换模块等组成。STC89C52RC单片机、485通信模块、超声波发射器和超声波接收器由电源转换模块供电;STC89C52RC单片机通过超声波发射器和超声波接收器与超声波传感器间接连接,与485通信模块是直接连接。超声波信号处理板功能如图4所示。

图4 超声波信号处理板功能
中央控制单元由STC90C516RD单片机、电磁阀线圈驱动模块、485通信模块、电源转换模块等组成。STC90C516RD单片机、485通信模块、电磁阀线圈驱动模块由电源转换模块供电;STC90C516RD单片机分别与电磁阀线圈驱动模块、485通信模块直接连接;电磁阀线圈驱动模块分别与行走制动电磁阀、驻车制动电磁阀直接连接。485通信模块是由MAX485芯片组建的通信电路,电磁阀驱动模块是由TIP122晶体管组建的开关电路,电源转换模块是由LM2596S组建的降压电路[12]。中央控制单元功能如图5所示。
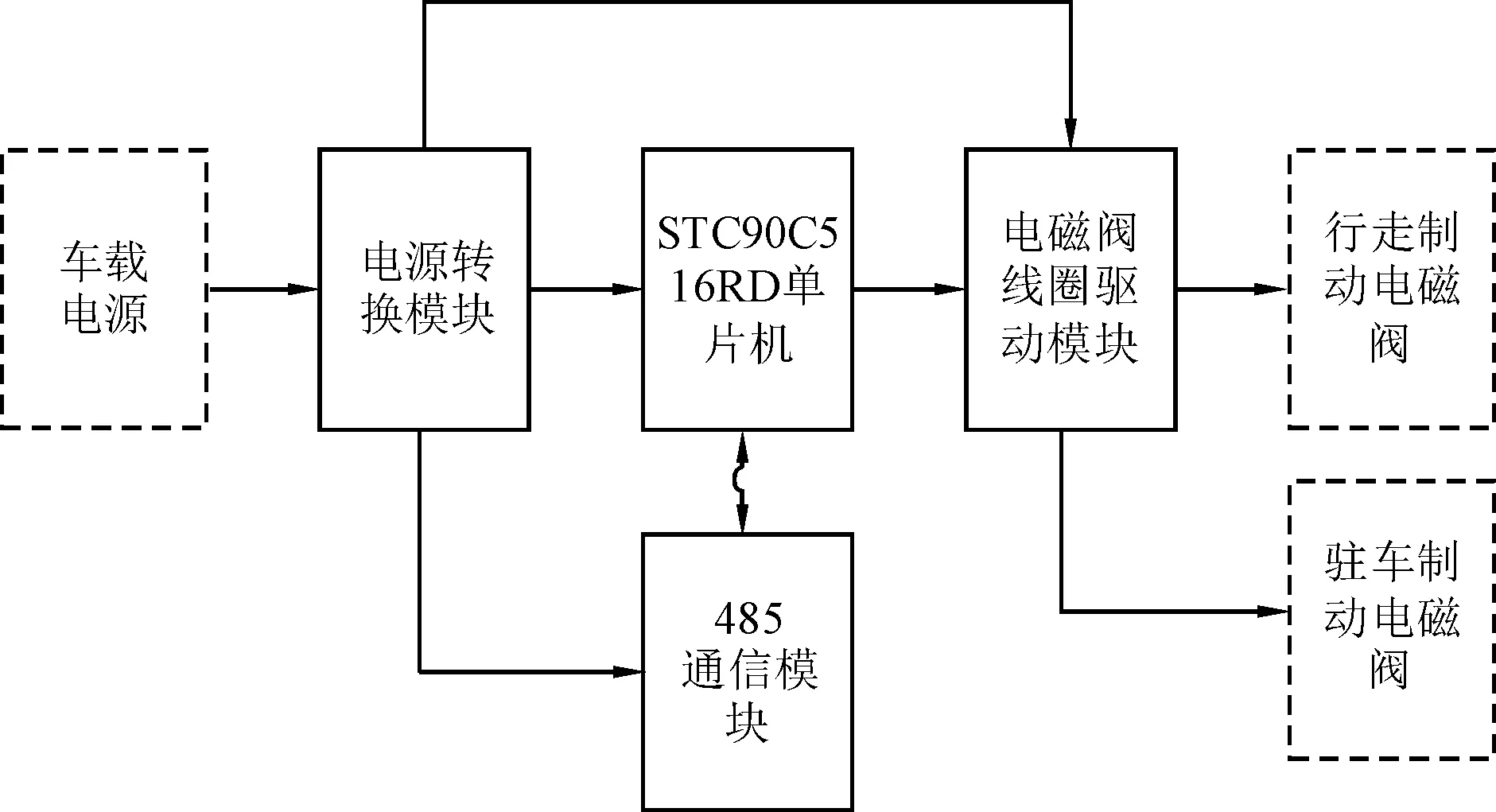
图5 中央控制单元功能
3.4 控制系统硬件功能
(1)超声波测距板。超声波测距板由超声波发送和接收模块、485通信模块、处理器模块等组成。前后超声波传感器发送和接收超声波,前后超声波信号处理器进行数据转换与精确计算,得出人或障碍物的距离数据,485通信模块和处理器模块将距离数据传输给超声波处理板进行数据处理[13]。超声波测距板电路如图6所示。

图6 超声波测距板电路
(2)超声波处理板。超声波处理板由无线遥控开关模块、电源模块、485通信模块、液晶显示模块、晶体管开关模块、处理器模块等组成。超声波处理板接收超声波测距板距离信号并进行计算,输出信号控制电磁阀线圈驱动模块通断动作,或接收无线遥控信号控制电磁阀线圈驱动模块通断动作,继而控制行走制动电磁阀、驻车制动电磁阀通断动作[14]。超声波处理板电路如图7所示。
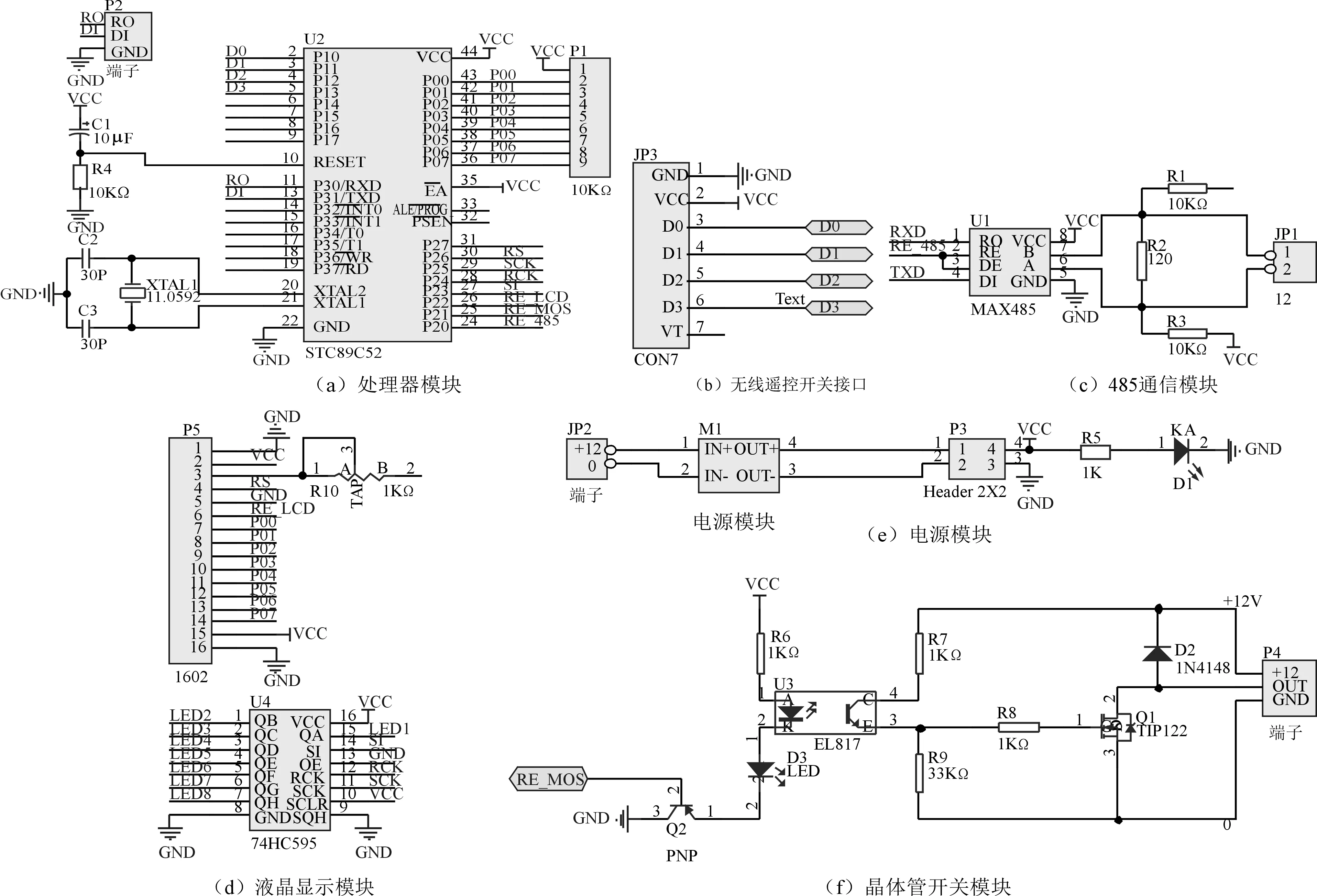
图7 超声波处理板电路
4 装机试验
依据双钢轮振动压路机作业主动安全控制原理、超声波信号处理器结构、控制器单元结构设计制作了双钢轮振动压路机作业主动安全控制系统,并将该系统安装在DYNAPAC CC522型双钢轮振动压路机上,进行了实车试验。试验测试数据及统计误差分析结果见表1。

表1 实车测试数据及误差分析结果
由表1可知,当压路机前后2 m内有人通过或存在障碍物时,压路机会在1.76~2.25 m内停车。
5 结 语
根据对压路机行驶液压系统和制动系统的分析,采取超声感应和远距离遥控技术,设计了振动压路机主动安全控制系统。装机现场试验表明:当压路机作业方向2 m内有人通过或遇到障碍物时,主动安全控制系统开始工作,振动压路机会在1.76~2.25 m内实现停车。该系统的成功开发能有效提高道路施工过程的安全性,防止压路机施工作业过程中伤人和碰撞事故的发生,从而有效保护施工作业人员生命财产安全,减少了不必要的损失。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09 11:33:30
动漫界·幼教365(大班)(2021年4期)2021-05-23 22:03:42
成都信息工程大学学报(2019年6期)2019-08-13 03:30:54
中国科技博览(2018年32期)2018-09-10 09:07:56
现代兵器(2017年4期)2017-06-01 09:06:51
西藏科技(2016年10期)2016-09-26 09:02:12
山西大同大学学报(自然科学版)(2016年6期)2016-01-30 08:29:38
筑路机械与施工机械化(2015年11期)2015-07-01 16:28:30
筑路机械与施工机械化(2014年5期)2014-03-01 02:59:22
汽车维修与保养(2013年11期)2013-07-25 05:30:26
