侧扫雷达测流系统开发与应用
2019-03-07 03:23林思夏曾仲毅朱云通张天宇胡电海
水利信息化 2019年1期
林思夏 ,曾仲毅 ,朱云通 ,张天宇 ,胡电海
(1. 南京微麦科斯电子科技公司,江苏 南京 211800;2. 黄河水利委员会上游水文水资源局,甘肃 兰州 730030;3. 江河众通(北京)科技有限公司,北京 100070;4. 江苏省水文水资源勘测局南京分局,江苏 南京 210008)
0 引言
河流的实时流量是水文、水资源管理及水利工程中最重要的资料,是智慧水文建设中的一个重要内容。传统水文,受气候、测量手段和安全性、响应时间等限制,流量测验一直是当今水文测量的难点。传统的接触式测流方案往往具有以下缺点而无法布置或不能正常施测:高洪期的河道水流流速大,含沙量高,漂浮杂物多,易造成仪器损坏并威胁人身安全;枯水期水流量小,部分河道的水深很小;水运航道上常有舰船航行,传统测验测报需要封锁航道,互相产生影响;界河一般无法架设缆道,流量测验测报难度更大。基于水位-流量曲线的流量测验方法过去发挥了重要作用,但由于水位-流量曲线大都缺乏高水位时的流量资料,因此这种方式很难得到满意的流量精度,而高水位流量资料往往是最受关注的[1]。
天然河道与人工渠道的流量测验通常在已知断面地形情况下(如不同位置水深分布)根据流速乘以面积计算获得流量,因此,流量测量的核心是流速的测量。目前我国流速测量以缆道测流为主,该方法利用横跨河岸的缆道搭载转子式流速仪和铅鱼沿河断面不同位置测量水流流速和水深,然后使用分段流速面积法估算累积流量,适用于恶劣天气和高水位作业,缺点是建站维护成本高,位置固定,且测量比较费时。近几年发展引进的水平声学多普勒流速剖面仪(H-ADCP)利用声学多普勒效应测量水流流速,解决了实时测量问题,但 H-ADCP 需要安装在水下,不适合浑浊、杂物较多的水体,同时由于仪器长期置于水中,维护成本高且易丢失。雷达测量作为一种远程遥感技术,近几年在河流流速测量方面进行了大量应用,可解决恶劣天气、高水位、复杂水体、应急测量等特殊情况下的流量监测。采用点流速测量方式的电波流速仪对安装位置要求很高,需要借助桥梁或者悬臂支架安装在水面上方,由于电波流速仪只能获得单点流速数据[2],如果河面较宽,则需要多个电波流速仪同时工作,代价很大。在分析测流需求及国内外产品性能的基础上[3],研制出侧扫雷达测流系统,以非接触的方式对河流断面的表面流速进行连续监测,每 5 min(可按照需求设置)完成 1 次自动测量,并根据提供的网络数据服务,通过水位、过流面积、断面表面流速比的数据交互,实现流量数据的网络合成。
1 侧扫雷达测流系统测量原理
侧扫雷达测流系统由侧扫雷达测流仪、水文基础数据通用平台(以下简称数据平台)、射频线缆、综合机箱(包含电磁波收发组件、中频信号处理机、工业控制计算机和稳压直流电源)、通讯设备、太阳能电源组成。侧扫雷达测流仪测量断面流速并将流速数据发送到云端的数据平台,数据平台通过断面资料、水位和流速数据合成流量数据。侧扫雷达测流仪包括发射和接收天线,由电磁波收发组件实现发射机和接收机的功能,中频信号处理机和工业计算机实现信号处理和数据转发等功能,数据存储在云数据服务器上,数据显示由访问云数据服务器的计算机或手机实现。
侧扫雷达测流仪是利用多普勒效应进行测速的,在原理上其实是一部脉冲多普勒雷达,但与其它多普勒雷达相比,它充分地利用了水流表面的Bragg 散射特性。
当测流仪发射的电磁波信号投射到水面时,会与水面的波浪发生相互作用[4]。当波浪长度是电磁波波长的一半时,会对电磁波信号产生最强的后向散射。河流波浪中同时存在前进波和后退波,来自相邻 2 个波峰产生干涉的后向散射条件为

式中:L 是相邻 2 个波浪的间隔,即波浪的长度;θ 为电磁波投射到水面的角度;λ 为电磁波发射信号的波长。这种机制称为布拉格(Bragg)散射或者一阶散射,频谱中尖峰称为 Bragg 峰或者一阶峰。
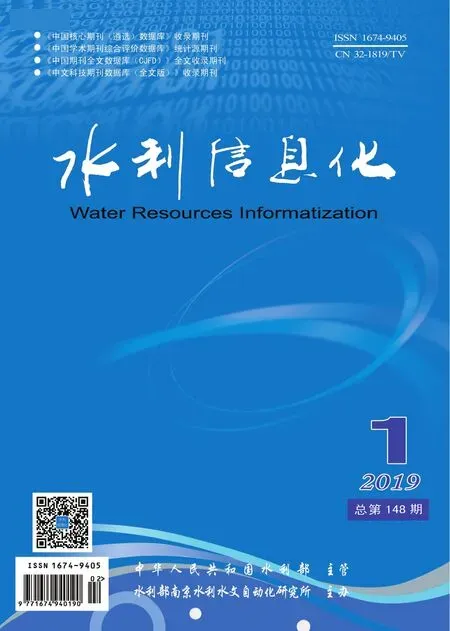
一阶 Bragg 峰的多普勒频移公式[5]为
式中:fB为布拉格散射频率,单位为 Hz;g 为重力加速度;vp为水波相位传播速度,C 为电磁波在空气中的传播速度;fr为电磁波载波频率,单位为 MHz[5]。
根据多普勒效应得到的多普勒测速公式为

式中:fd为多普勒的频移;v 为电磁波照射的物体速度。
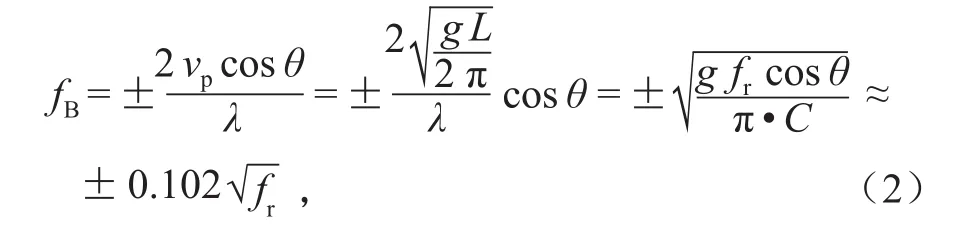
当水面流速不为零时,会在 Bragg 频移的基础上再叠加一个频偏 Δf,这个频率偏移量可以是正数也可以是负数,与水面流速方向有关,大小与水面流速大小有关,水面回波信号频谱如图 1 所示。实际测量的回波进行傅里叶变换得到的频谱图如图 2所示。图 1 中 f0为发射信号的原始频率,图 2 中零中频两侧的 Bragg 峰的位置在红色圆圈中,求得峰值位置的频率值与 fB的差值为 Δ f。
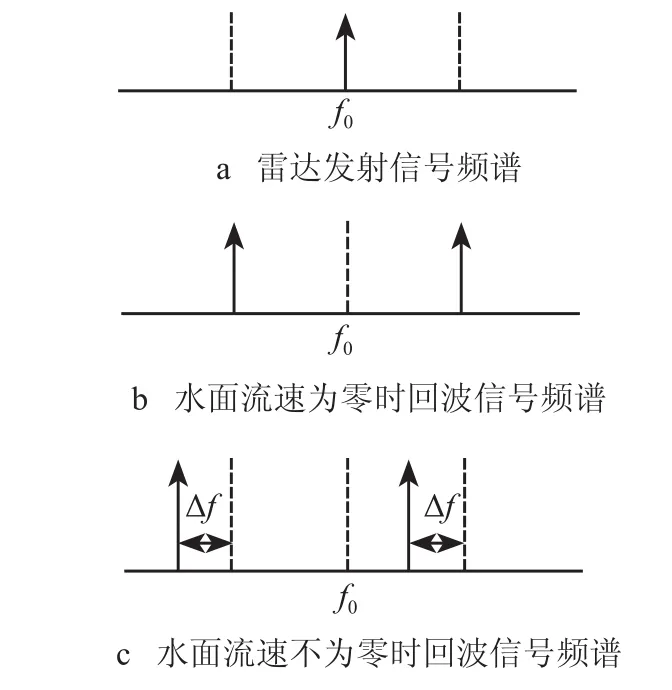
图1 电磁波水面回波信号频谱
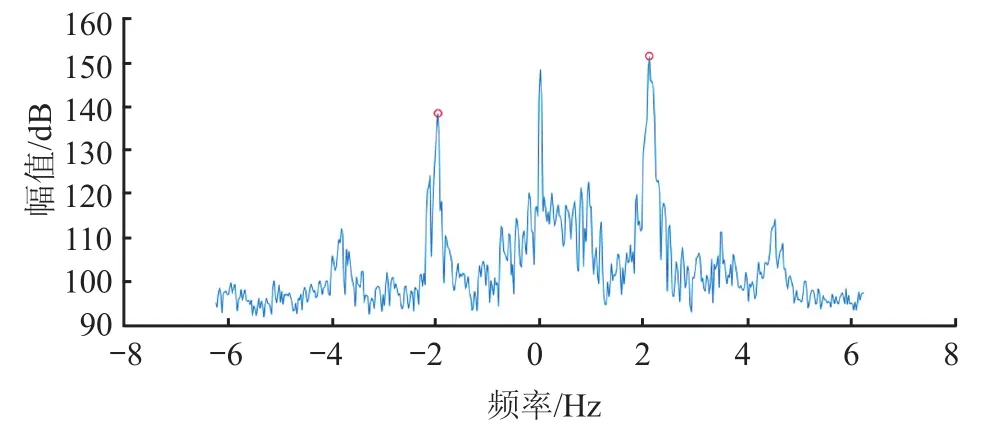
图2 实际测量得到的回波频谱图
假设电磁波发射天线方向图函数为 Ft(ω,φ),接收天线方向图函数为 Fγ(ω,φ),则任何频率的水流回波的频谱表示如下:

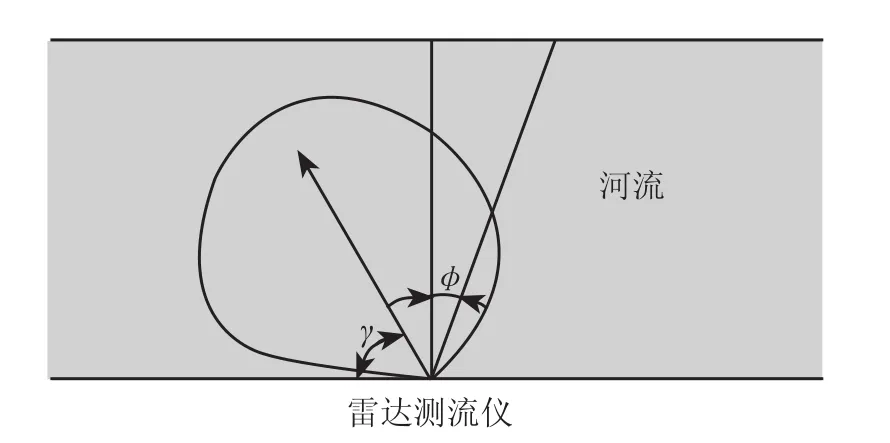
图3 雷达测流仪天线角度几何图
2 侧扫雷达测流系统设计
侧扫雷达测流系统可以露天安装,安装位置有较牢固的基础即可,考虑到使用太阳能电池板,场地面积一般不小于 1 m × 2 m,太阳能电池板可向正南方向安装,安装示意图如图 4 所示。
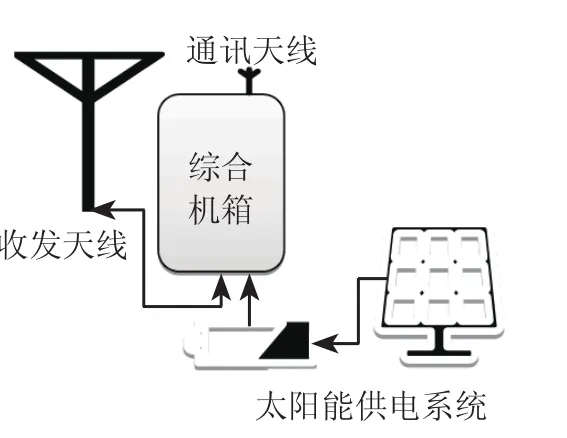
图4 侧扫雷达测流系统组成示意图
2.1 雷达测流仪设计
1)确定发射信号波长。一般情况下,波长越短,测流仪的体积越小,因此应尽量选择短波长。河流表面的波浪含有多种波长,从厘米级到米级均有出现,均能满足 Bragg 散射条件,但波长越短,散射信号越弱。综合考虑设计成本和原理效果,选择的电磁波波长为 0.72 m(工作频率为 415 MHz)。
2)确定工作方式。目前商品化的雷达测流仪均采用调频连续波工作方式,这种工作方式的优点是峰值功率小,成本低;缺点是信号占用频带宽,收发天线隔离度要求高。所以测流系统采用脉冲多普勒体制,点频工作,虽然成本高,但性能很好,而且不会与现有的非接触式测流设备发生知识产权方面的纠纷。为提高测流系统的可靠性,采用天线共址,收发分开的结构形式。信号部分采用直接射频采样,数字正交相参混频,FIR 数字滤波和抽取,DDS 频率合成,多普勒处理,高精度定向算法等技术措施,数据结果可以采用以太网通信技术或其他通信方式完成传输。
3)设计信号波束。侧扫雷达测流仪安装在河岸上,考虑到河流中常有船只通行,设计了 3 个独立波束,分别指向上游、前方和下游。内河的船只一般只出现在 1 个波束中,因此在进行数据处理时,对原始数据采用三取二的滤波法则踢除船只信号。从实际使用情况看,效果非常理想。
针对单个波束只能获取径向多普勒速度的特点,设计了 2 个对称波束(分别指向 ± 45°)。这样对测流系统安装和调整的要求简化到只需要对着河流即可,不需要进行信号波束的指向标定。既方便实际使用,也可有效克服河岸上出现大风等情况时雷达测流仪支撑架受力变形的影响,数据精度稳定可信。
设计时考虑实际使用情况,分别设计了 100,200,800 型(最大测量河面宽度分别为 100,200,800 m 以上)等三型雷达测流仪。三型雷达测流仪的体制相同,基本硬件设备相同,区别在于发射功率和天线规模不同。如果需要便携式,可以将 100 型简化为单个天线使用。如果测量的河道宽度超过800 m,则可在河流两岸各安装 1 台 800 型,数据融合后送至指定地点。
雷达测流仪技术性能指标如下:探测河面宽度为30~800 m;测速范围为 0.025~20.000 m/s;测速误差(均方根误差)≤ 0.01 m/s;速度分辨力 ≤ 0.01 m/s。200 和 100 型的距离分辨力都为 10 m;800 型的距离分辨力为 20 m。
2.2 其他设备设计
1)通信设备。数据传输网络通信设备采用支持4G 移动通信网络的水文专用 RTU,兼容联通和移动4G/3G/2G,以及电信 4G 网络,主要实现数据自动发送、报警信息发送、短信遥调和数据查询等功能。
测流系统中有 Wi-Fi 网络设备,如果安装位置有无线网接入点,可以实现远程管理和故障诊断。
2)供电设备。太阳能供电设备包括 1 块 200 W的光伏组件(太阳能电池板)、供电控制箱和 80 A·h的磷酸铁锂电池。在 4 h 平均日照条件下日均发电量为 640 W·h,测流系统的日平均耗电为 520 W·h。太阳能供电系统的发电量大于设备日耗电量,同时80 A·h 的电池在无太阳能充电的情况下,可以支持测流系统连续工作 7 d,所以只有在出现极端天气情况时才需要人工干预。供电控制箱中有市电充电接口,可以使用 220 V 交流电为电池充电。在电池无法输出的状态接入市电,48 h 可以充满。
2.3 安装位置设计
单台雷达测流仪安装在河岸上,如图 5 所示,雷达测流仪天线安装高度为 H,河道宽度为 B,安装地点与河水的距离需 > 5 m,安装架高度由最大探测距离确定,一般探测最远点与雷达测流仪波束的夹角 α(远端视角)应 > 1.5°,tan α = H/B。计算可得,800 型在探测时,安装架高度应高于 26 m。但安装架的位置还必须考虑最近距离,近端视角 β不应 > 45°,以免最近处的河流出现在雷达测量仪波束照射盲区内。安装位置固定后,设置雷达测流仪水平补偿距离为雷达测流仪位置到断面起点的距离,就可以将雷达测流仪测量的垂线位置与断面上的水平位置保持一致。
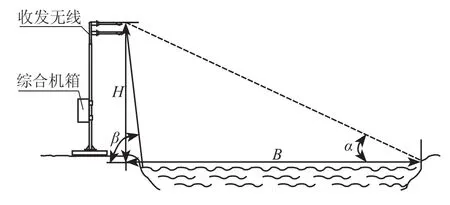
图5 侧扫雷达测流系统安装位置几何图
雷达测流仪天线到河面的区间应开阔,以安装点为基准的左右 60° 视角内从安装位置到河对岸,不能有树木、铁塔、桥梁和建筑物等。安装点应选择在平直的河道上,上下游平直长度应超过 200 m。尽量远离水坝和水库,降低水坝、水库的影响。
安装点还需考虑电磁环境及干扰防护,应与高压线、电站、电台、工业干扰源设施保持安全距离。电磁环境应有利于侧扫测流雷达站的运行,不可避免的有源干扰造成的接收机灵敏度损失不应>1 dB。
通过试验分析,得到雷达测流仪最佳使用环境如下:河宽最小为 30 m;流速为 0.025~10.000 m/s;水深最小为 15 cm;水波纹高度最小为 3 cm;水位变化不超过安装高度的 0.7 倍。
3 侧扫雷达测流系统试验分析
2016 年 12 月及 2017 年 1 月,利用侧扫雷达测流系统分别在南京秦淮河及兰州黄河段进行了试验,得到的南京秦淮河、兰州黄河段的回波频谱分别如图 6 和 7 所示。
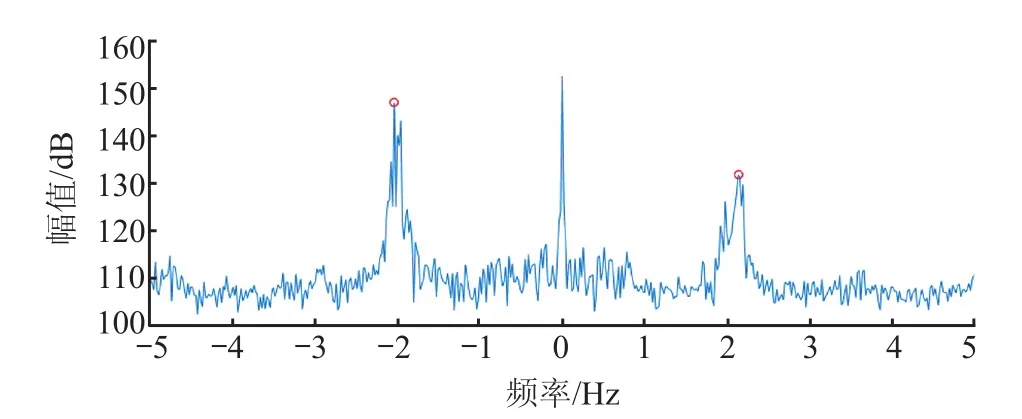
图6 在南京秦淮河试验的回波频谱(2016-12-17T10:00)
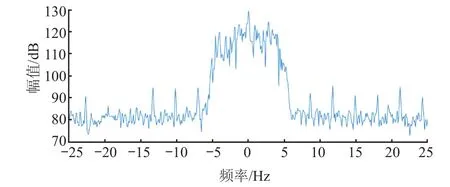
图7 在兰州黄河试验的回波频谱(2017-01-10T10:00)
从图 6 和 7 中可以看出,秦淮河与黄河的回波频谱有较大差别。主要表现在黄河的回波频谱较散,谱宽较宽,与图 2 的形状差别较大,没有明显的布拉格峰;秦淮河的回波谱宽则较窄,有明显的布拉格峰出现。经过分析,产生这种现象的原因是:由于雷达测流仪天线采用 Yagi 天线,单根天线的波束比较宽,达到 66°,黄河水流速度大,河流表面波浪较高,粗糙度大,回波较强,天线宽波束导致雷达测流仪在波束内的每个方向均能收到回波,而角度不同又引起多普勒速度的不同,因此黄河表面的雷达测流仪回波表现出较宽的谱宽;秦淮河由于冬季水流速度较低,波浪非常小,因此回波较弱,只在天线增益较大的方向上有明显的回波信号。
针对这些情况,修改了多普勒速度提取算法。首先获取天线的准确方向图,将天线方向图的幅度调整在波束最大值处相等,并校正通道相位路径。然后对方向图进行量化,设发射方向图函数为 Ft(n T),接收方向图函数为 Fr(n T),这 2 个公式中,n = 0,1,2,3 …,T 为发射重复周期,Fr(n T)为周期函数。再设接收到的回波序列为 G(n T),则进行卷积有:(Ft(n T)× Fr(n T))× G(n T)= y(n T)。 (6)
很明显,当 y(n T)最大时,天线方向图与 G(n T)拟合得最好,由此可以计算得到回波方位中心。
修改后的处理算法能够同时适应南京秦淮河及黄河的频谱提取。根据频谱中提取的Δf[6],计算水体表面的径向流速,再由径向流速和回波方位中心的角度合成水体的表面流速。
4 侧扫雷达测流系统数据处理
从每个距离段的回波频谱提取出水体的表面流速,依据频谱的信噪比计算置信度,每个距离段的表面流速和置信度就是测流系统的基础数据。将基础数据按距离排序,同时计算出整体断面的平均流速和总置信度。
目前侧扫雷达测流系统传送的测速数据包括:测流断面数学平均流速、测速总置信度(信噪比)、断面线上每段距离的表面平均流速、每段流速的置信度、分段长度、电源电压、环境温度和数据传送无线网络信号强度等。在黄河、长江、图们江等水文站的实际应用中,侧扫雷达测流仪将流速数据发送到数据平台,然后在数据平台上合成流量数据,并能够把用户的实测资料输入到数据平台,方便用户做好比测率定工作。
经过率定,将不同水位的流速比参数和断面资料输入数据平台后,根据测速时刻的实时水位数据计算过流面积。图 8 是实测长江下游在不同距离上的流速分布图,左图为每 10 m 距离的表面流速和过流面积,通过每一段的过流面积在断面总体过流面积中的占比计算出每一段表面流速的权重值,数据平台就可以自动计算表面加权平均流速,并根据表面加权流速与断面平均流速的流速比参数和过流面积自动合成流量。2018 年 6 月长江水位、流速及合成后的流量变化曲线如图 9 所示,长江下游水位变化是由潮汐引起的,有较强的时间规律,并且与一般河流流速水位关系不同,在水位上涨时,流速反而下降。

图8 实测长江下游流速分布图
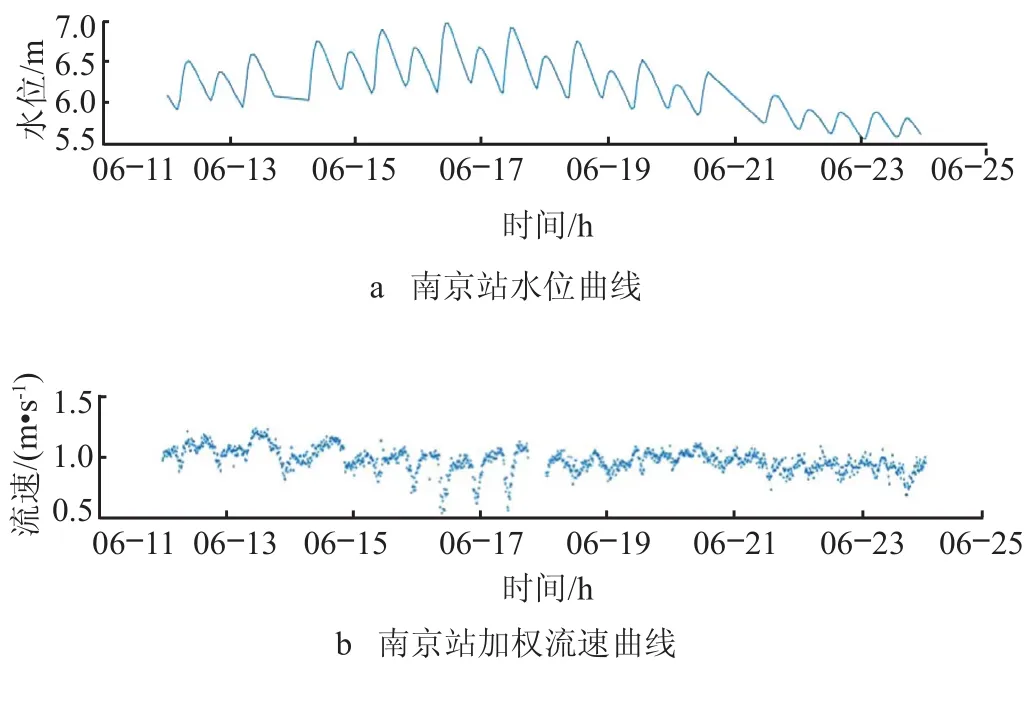
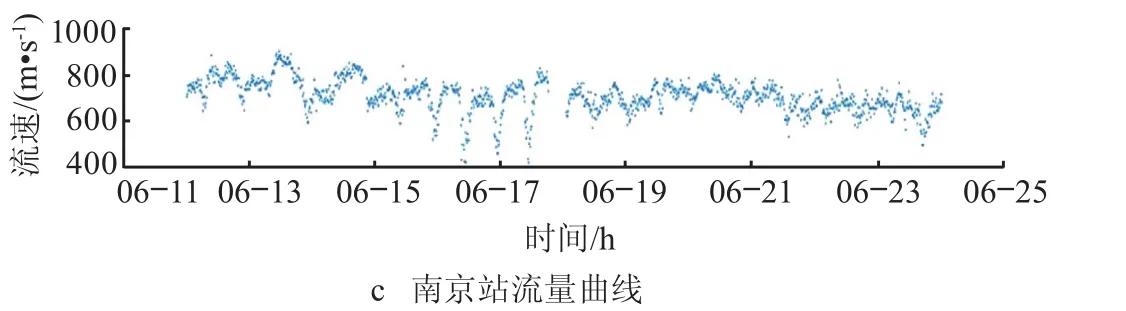
图9 通用平台流量合成显示
5 结语
侧扫雷达测流系统采用非接触式测量,几乎可以用于国内各种河流及湖泊等大面积水域的流速测量,还可安装在车辆上完成应急移动测量。测流系统只需要安装在岸边即可完成河流表面流场及流速测量,并能长期连续提供数据,对设备的使用环境要求降到最低。测流系统可以承担中小河流、渠道的流量监测,能在抗洪救灾、除险加固、江河治理方面发挥巨大作用,特别是使对洪水携带漂浮物、浅滩过水等高难度的流量测验任务变得简单易行。
通过对黄河、长江、图们江及南京秦淮河的实地监测和探测试验,验证了测流系统实施方案的可行性和适用性,目前已在兰州、南宁、郑州、南京、南昌、图们江等地的水文站进行连续比测实验。测流系统将传统的人工施测流量改为每小时数次测流,不仅可高效率获取流量资料,还减轻了职工的劳动强度,使水文监测数据获取得到质的飞跃。
与国外的同类型产品相比,侧扫雷达测流系统在产品价格、售后和数据服务等方面都具有一定优势,也较先应用适用于此类产品的流量合成算法。
现阶段侧扫雷达测流系统在应用时需要设置系统参数,其中最重要的是最大流速限制,这个参数决定了系统误差。如果是低流速模式,则无法在高流速的环境下使用;但高流速模式在低流速的环境中测量,测量结果的系统误差会比较大。所以在后续的研究中,需要在测流系统中引入迟滞回归线的算法实现系统参数的自动切换,提高系统对复杂环境的适应性。
猜你喜欢
治淮(2022年11期)2022-12-03
黑龙江水利科技(2022年4期)2022-05-25
初中生学习指导·提升版(2022年4期)2022-05-11
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
空间科学学报(2021年6期)2021-03-09
黑龙江水利科技(2020年11期)2020-12-11
大众科学(2020年7期)2020-10-26
陕西水利(2020年4期)2020-06-04
小天使·六年级语数英综合(2018年1期)2018-10-08
人民音乐(2016年3期)2016-11-07