无人机森林航摄影像三维点云估测林分蓄积量研究
2019-03-06 03:35李亚东曹明兰李长青明海军
中南林业科技大学学报 2019年3期
李亚东,曹明兰,李长青,明海军
(1.北京工业职业技术学院,北京 100042;2.北京林业大学 精准林业北京市重点实验室,北京 100083;3.内蒙古大兴安岭林管局森林调查规划院,内蒙古 牙克石 022150)
无人机具有机动灵活、时效性强、成本低廉、分辨率高等优点[1],已广泛运用在农林、灾害监测、气象探测、资源环境、市政规划等领域[2-5]。森林对维护生态平衡起着至关重要的作用,是人类赖以生存和发展的资源和环境。森林蓄积量大小标志着林地生产力及经营措施的效果,是评价森林的重要指标[6]。估測森林蓄积量能够把握森林资源量,是制定森林经营计划与林分采伐的重要依据[7]。近年来随着遥感技术的发展,在林业森林蓄积量估测上的应用也进入高速发展的快车道[8]。基于遥感技术的蓄积量估测理论和估测方法均有了长足发展。而基于有人机的森林资源调查费用较高、人力物力投入大,已经无法满足当今森林资源调查和监测的需求。无人机航测技术势必会在森林资源调查和动态监测中发挥极大的优势[9]。
目前,多数基于影像的蓄积量估算,均建立在测绘标准所生成的DOM、DSM、DEM等测绘成果基础上,而无法充分利用原始影像数据上的林业特征,无法从点云层面上加入林业业务逻辑产生成果数据。本文利用无人机航摄影像数据制作出三维点云,利用基于点云提取的森林树冠、树高因子估测了森林蓄积量,并结合实地调查数据进行比较分析。
1 研究区概况
内蒙古大兴安岭阿尔山林业局伊尔施林场位于内蒙古兴安盟阿尔山市最北端,地理位置119°28′~ 120°01′E, 47°15′~ 47°35′N。 本 研究的实测数据来自阿尔山林业局伊尔施林场1号林班10小班。小班地势平缓,树种为白桦天然中龄林,林分郁闭度0.6。经过现场踏查,在距离林缘20 m的区域,布设了50 m×50 m的标准地,标准地内样木为259株。
2 无人机森林航摄影像获取
2.1 设备参数
测图鹰X100固定翼无人机,机长0.6 m,翼展1 m,起飞重量2 kg,巡航速度75 km/h。该航测遥感无人机系统操作简单,弹射起飞、全自动起飞降落、自动航线规划,无人机搭载了Canon 5D Mark II数码相机。
2.2 航线规划
无人机航拍前检查飞行测区内情况,以确定无人机起降点,并确保起降区域没有较高的障碍物。航拍设计航高150 m,规划5条航带,航带间隔84 m,规划航向重叠85%,旁向重叠65%,相机焦距35 mm,空间分辨率0.03 m。航拍当天天空透亮、能见度较好,风力小于2级。航拍完成后,导出拍摄影像和飞行日志数据。经过现场检查,拍摄的图像景物比较清晰、亮度适中、色调饱和,没有漏拍区域。
2.3 生成密集点云
本文获取无人机航摄影像后,利用特征点提取与匹配方法自动相对定向基础上,结合控制点和光束法平差的迭代求解,解算出精确的相机姿态数据即可生成核线影像。在核线影像上沿核线方向一维搜索特征点进行影像密集匹配,从而生成密集点云。生成的密集点云的密度约620 个/m2。数据处理流程,如图1所示。
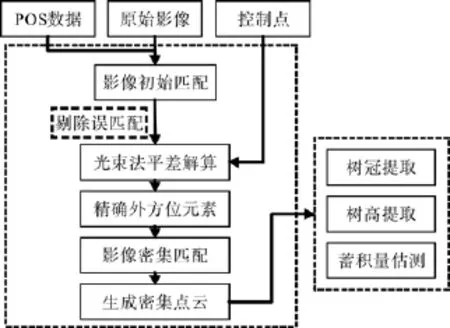
图1 森林调查航摄影像处理流程Fig.1 Aerial stereo image processing procedure for forest survey
3 林分参数提取
生成密集点云后,采用对原始三维点云过滤的方法进行树冠分割[10],所提取的树冠模型(图2)。树冠提取采用公式(1),树高提取采用公式(2)。

式中:X,Y,Z为树冠表面上任意一点的三维坐标;满足条件Zt-ch≤Z≤Zt。


图2 树冠模型Fig.2 Crown model
3.1 树冠的提取方法
对森林调查航摄影像处理得到的原始密集点云进行滤波处理提取树冠信息。与数字图像或信号信息不同,三维点云信息无明显的定义域,因此不存在某种规律或数值关系可定义。因此,三维点云基本依赖几何信息做滤波。PCL等软件已对直通滤波器、体素格滤波器、统计滤波器、半径滤波器等常规滤波手段进行了很好的封装。另外,还可根据林分参数的已知信息以及取值域等可利用的先验信息进行滤波处理。通过滤波处理可过滤掉离散点、地表面点等信息。然后对滤波后的点云进行聚类,将同一类内的点云降维到二维平面上。利用GIS的点要素转线要素算法,将所有点元素转为线元素,再将线元素转为面,合并面元素获得林冠面状数据,如图3所示。

图3 树冠由点云到多边形的过程Fig.3 Process of crown transforming from point cloud to polygon
图3中从左到右依次为同一株树冠的插值后DOM、树冠原始点云聚类后降维到二维平面的点云、点元素转为线元素、线元素转为面的碎面、合并后的树冠平面投影范围Polygon。求出平面投影范围Polygon的外接矩形Envelope,即可得到冠幅的长和宽,再平均即可。
提取的冠幅平均值p是根据自动提取的树冠面积计算得到,冠幅的实测值是测量获得标准地白桦样木的南北冠幅和东西冠幅的平均值。对提取的冠幅与实测冠幅进行分析发现,提取冠幅的最低精度为0.73,最高精度为0.96,平均精度达到0.85以上。提取冠幅值均低于实测冠幅值,并存在线性相关,线性回归R2=0.89。

式中,为冠幅平均值,S为自动提取的树冠面积。

图4 冠幅提取值与实测值关系散点图Fig.4 Scatter diagram of relationship between crown breadth extract values and measured values
3.2 树顶点与树高的提取
聚类分享林冠点云数据后,遍历搜索Z坐标的最大值,将其作为该树冠的顶点。提取树冠顶点后统计测区内提取的树木株数,并与标准地实测数据推算的测区株数进行比较,获得测区内白桦株数的提取精度。航拍影像中提取的白桦株数为975株/hm2,与标准地实测株树推算出的单位株树1 036株/hm2比较,提取精度达到了94.11%。

图5 树冠投影多边形与树顶点叠加示意图像Fig.5 Overlapping of crown projection polygon and tree vertices
如公式(2),通过计算顶点Zt与地面高Zg之差获得树高值。利用所有树冠多边形作为空间查询的输入,将已包含关系作为空间关系条件,在地面高Zg是在原始点云中查询的结果集与原点云做非操作得到地面点,对地面点插值生成小班DEM,再根据顶点坐标(x,y)得到顶点对应的Zg。计算树高的提取精度公式如下:

其中,提取精度ε,提取树高Ht,实测树高Hs。
利用式(4)计算出树高的提取精度最低为0.75,提取精度最高为0.97,树高值的平均提取精度达到0.83以上。分析发现,树高的提取值与实测值之间存在线性相关关系,其线性回归的R2=0.774 9。

图6 树高提取值与实测值关系散点图像Fig.6 Scatter diagram of relationship between tree height extract values and measured values
4 林分蓄积量估算
林分蓄积量是森林单位面积活立木的材积总量。计算林业产出效益时,根据单株活立木材积乘以单位面积株数,计算出单位面积森林蓄积量。目前,主要采用树高与胸径的二元材积模型计算单株活立木的材积。无人机航空摄影无法直接获取活立木胸径信息,但可以提取树高和树冠信息。活立木的材积量除了树高和胸径,还与冠幅值密切相关。因此本文采用以树高和冠幅作为解释变量,建立了立木材积二元模型,以此估測单株活立木材积[11]。

式中,V为立木材积(m3);H为树高(m);Cw为冠幅(m);a,b,c为参数估计值。

式中,M为小班总蓄积量(m3);V为单株立木材积(m3);H为树高(m);Cw为冠幅(m);a,b,c为参数估计值。
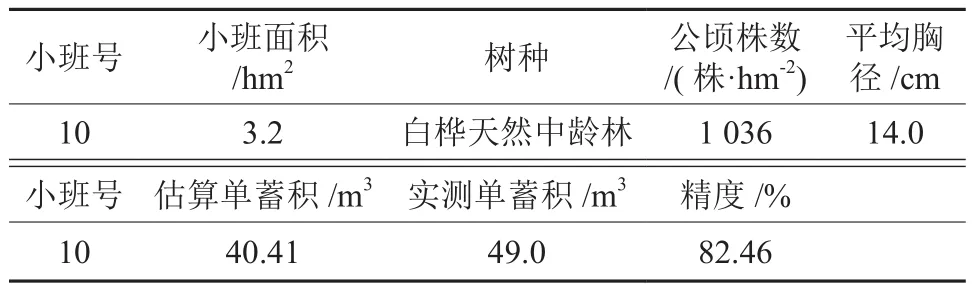
表1 无人机航摄影像三维点云森林蓄积量估算精度Tabel 1 Estimation accuracy of three-dimensional point cloud forest accumulation in UAV stereo photography
利用标准地中测定的实测树高和冠幅数据,应用最小二乘法对公式拟合,获得参数估计值a,b,c。分析表明,无人机航摄影像三维点云森林蓄积量的估测精度为82.46%。
5 结论与讨论
本研究利用无人机航摄系统采集了内蒙古大兴安岭林业管理局阿尔山林业局伊尔施林场航摄影像,利用特征点提取与匹配方法自动相对定向基础上,结合控制点和光束法平差的迭代求解,解算出精确的相机姿态数据生成核线影像。在核线影像上沿核线方向一维搜索特征点进行影像密集匹配,从而生成密集点云。利用林分三维点云提取了树冠、树高、树顶点等林分特征信息,估测了林分单位面积蓄积量。结果表明,无人机航空摄影三维点云中提取的树冠提取精度达到
85.15 %,树高提取精度达到83.69%,林分蓄积量估测精度达到82.46%,满足森林调查精度要求。基于无人机航摄影像三维点云估测森林蓄积量方法,最大限度地保留了原始影像中的林分特征,提高了林分特征提取准确度。该方法实施效率高,短期内可获得大量林分航摄影像图进行林分蓄积量估測,可代替繁重、艰苦的野外人工森林调查工作,不仅降低成本,还提高了效率。无人机航摄影像与机载雷达和高分辨率卫星影像相比,具有航线设计灵活、时相性好、重叠度大、分辨率高等优点,还可以根据任务要求搭载不同的设备来完成。因此,基于无人机航摄影像的林分蓄积量估算等应用前景广阔。由于时间和实验条件限制,仍有很多不足和改进的地方,如倾斜坡度上的树高修正,倾斜摄影技术的应用方面有待进一步研究。
猜你喜欢
安徽农业科学(2022年19期)2022-10-29
绿色科技(2022年11期)2022-07-02
绿色天府(2022年2期)2022-03-16
林业科技情报(2021年3期)2021-09-01
防护林科技(2020年6期)2020-08-12
绿色科技(2019年6期)2019-04-12
绿色科技(2019年6期)2019-04-12
绿色科技(2017年16期)2017-09-22
现代农业科技(2017年12期)2017-07-29
安徽农学通报(2014年9期)2014-06-23