基于毫米波雷达的车辆测距系统
2019-03-06 06:54吴荣燎金钻钟停江代皓宇
汽车实用技术 2019年2期
吴荣燎,金钻,钟停江,代皓宇
(南京航空航天大学金城学院,江苏 南京 210000)
引言
近年来,随着全球汽车保有量地迅速增加,汽车的安全性以及智能化、舒适性等因素越来越多地被消费者所关注。根据中国新车评价规程(C-NCAP),自动紧急制动系统(AEBS)已经在2018年纳入评分体系,因此毫米波雷达的需求量将会上升。另外,展望未来,体积更小、探测距离更长的毫米波雷达将占据更多的传感器市场空间。汽车领域向着无人驾驶的方向日益发展,其根本目的是减少汽车在日常交通环境中由于人为原因造成安全隐患。在汽车上搭载基于毫米波雷达,可以实现前向碰撞预警(FCW)、自动紧急制动(AEB)等功能,大大提高了汽车的安全性。
1 毫米波雷达介绍
毫米波雷达是工作在毫米波波段的雷达,具有体积小、质量轻和空间分辨率高的特点。毫米波导引头穿透雾、烟、灰尘的能力强,具有全天候、全天时的特点。目前市面上毫米波雷达的实物图如图1。毫米波雷达通过信号的发射和接收,处理后获得汽车前方障碍物的各种信息(相对速度、相对距离、相对角度等)与自身车辆信息结合后,提供一定的信息给驾驶员,并在出现危险情况时发出警报给驾驶员。目前市面上主流的毫米波雷达的工作流程图如图2。

图1 毫米波雷达实物图

图2 毫米波雷达工作流程图
1.1 毫米波雷达测距原理
毫米波雷达的测速原理是通过发射信号和回收信号,通过接受到的信号频率与自身的频率对比处理,从而得出该车与障碍物之间的相对距离和相对速度。当传感器发出信号和接收信号的时间差为Δt,距离为R,光速为c,根据公式。即可算出该车相对于障碍物之间的距离。
1.2 毫米波雷达测速原理
根据多普勒效应可知发射和接收的信号存在多普勒频移,即频率会有差别。所以把对于障碍物反射收到的多普勒频移为fd,波形图如图3所示:

图3 雷达识别运动目标及静置目标图
其发射和反射的三角波中频频率可表示为

试中Δf代表中频频率;fd表示多普勒频移,由式1-3就可以求出雷达与目标之间的相对速度,表达式为:

f0代表发射波中心频率,λ代表波长。速度v的符号与目标相对运动趋势相关:目标接近时v为取正值,目标远离时v取负值。[1]
2 各种车载雷达对比分析
2.1 激光雷达
激光雷达有着较好的分辨率,较强的抗干扰能力,还有体积小,质量轻的特点。但是,激光雷达受天气情况影响较大,价格过高,难以普及到大众的车辆中成为驾驶辅助系统的传感器,且激光雷达测距一般适用于静态测距,不适合于本次设计的驾驶辅助系统的测距要求。
2.2 摄像头
摄像头的成本较低,在白天可以较好的识别道路交通环境,摄像头在车上主要应用于倒车或者盲点测控,辅助驾驶员得到更多的车周围的信息。劣势在于受光照和雨雪天气的影响较大,并且光照的变化对其识别精度有很大影响。[2]
2.3 超声波雷达
超声波雷达利用传感器发射超声波并接收由障碍物反射回来的超声波,通过发射与接收的时间差来判断计算车体到障碍物的距离,缺点是由于声波在空气中传播比较慢,对于车速快,探测距离远的情况并不适用,且超声波雷达发散角度大,能量大大降低,会导致分辨能力下降。所以这适用于倒车,不满足我们的无人驾驶系统的测距并制动功能。4种传感器对比如图4。
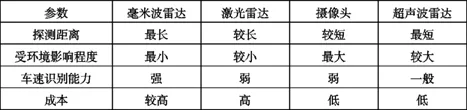
图4 四种传感器优缺点比较
3 制动时间和距离计算分析
3.1 驾驶员制动
驾驶员从发现情况到大脑进行判断之后支配手脚进行操作,这段时间被称为反射时间,约需0.35秒,脚离开加速踏板并且转移到制动踏板上的时间约为0.25秒,所以当驾驶员从发现前方有情况到踩下制动大约需要0.6秒,但是考虑到驾驶员有个自身的判断,所以大约会有1.0秒的自我判断时间,所以由人工完成整个制动的时间大约会达到1.6秒。
3.2 汽车自动制动
因为雷达发射的电磁波在空气中的传播速度基本等于光速,所以从发射信号到接收信号的时间差极小,所以该车的“反应时间”几乎为零。
3.3 距离计算

图5 制动过程
一般踩下制动踏板后,车辆不会立即开始产生加速度,即不会立即产生制动力,这是因为制动器的机械结构之间会有空隙,需要一定的磨合,而克服这种制动间隙所需要的时间大约是0.6秒,之后车辆才能真正开始产生制动力,迫使车辆刹停。图5为车辆制动全过程:
将制动过程中最大的加速度设为a,斜率设为k,那么k与a之间的关系为:

可以得出:

通过对路程S积分,再把a带入得:

所以总的距离S的表达式为:

通常情况下t3取0.1秒,车辆最大制动a平均取7.0m/s2,当我们的车速以25km/h的速度行驶时带入式中可以推测出驾驶员完全自主制动距离为18.9m,而有着毫米波雷达辅助制动系统的车辆只有7.9m的制动距离。对比分析,发现自动制动距离只有人工刹车的0.4倍,这大大减小了危险程度,保障车中人员的安全。
4 毫米波雷达测距系统的设计
4.1 毫米波雷达的硬件系统
对各类应用于汽车的传感器进行比较和分析之后,由于毫米波雷达具有测量距离远,全天候都能达到一个理想的工作状态,测距的精度远高于视觉传感器,并且能够适应城市中复杂的路况和交通环境,因此近几年来,越来越多的车型装备毫米波雷达。目前,毫米波雷达是专用于机动车驾驶辅助系统ADAS(Advanced Driving Assistant System)的微波雷达传感器,主要用于主动碰撞预警,辅助机动车完成障碍物规避的功能。现在随着新能源汽车及车联网技术的发展,毫米波雷达的应用更加地广泛,特别是在汽车主动防撞安全领域。本次车载毫米波测距雷达采用77GHz的毫米波雷达,用于本次车辆测距系统,以77GHz的毫米波雷达位架构进行开发,具有集成度高,可以做更多的通道,识别进度也更高,穿透性也更强,本文设计的车辆测距领域的毫米波雷达硬件框图6如图所示。[3]

图6 毫米波雷达系统硬件框图
4.2 毫米波雷达的软件
毫米波雷达通过整车的CAN网络,ECU对反射回来的雷达波进行数据采集并进行识别与处理,针对当前汽车的行驶情况,如果出现危险的情况,毫米波雷达控制车载仪表盘做出相关的报警,给驾驶员一定的提醒,当驾驶员没有对该危险情况做出反应时,进而控制车辆进行减速或加速等操作。[4]
5 结束语
本文针对毫米波雷达在车辆上的应用,通过分析、计算得到其在行驶中的安全距离。通过与其他传感器的对比综合得出毫米波雷达有着更好的测距能力。在智能网联汽车的背景下,毫米波雷达有着极大的发展可能,又有着很大的提升空间,将传感器融入车载计算机,极大地提高了驾驶安全性,也进一步地为驾驶辅助系统奠定了硬件基础。[5]
猜你喜欢
导航定位学报(2022年4期)2022-08-15
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
电子制作(2019年24期)2019-02-23
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23
好孩子画报(2019年10期)2019-01-10