5G自动驾驶业务网络解决方案探讨
2019-02-27 01:35:30崔波滕琳雅吴坚鹏孙兵范才坤
广东通信技术 2019年2期
[崔波 滕琳雅 吴坚鹏 孙兵 范才坤]
1 引言
3GPP 2017年底已完成5G R15 NSA标准,2018年中已完成5G R15 SA标准,至此形成第一版完整的5G R15标准(主要面向eMBB场景),2019年底将冻结面向eMBB、mMTC、uRLLC三大场景完整版本的5G R16标准。5G具有超高速率、超低时延、超大连接的特性,将实现经济社会产业跨领域发展和产业融合,垂直行业将依托5G网络产生巨大变革。工信部与国家标准委于2018年6月15日联合印发《国家车联网产业标准体系建设指南》,其中指出,未来将加紧研制自动驾驶及辅助驾驶相关标准、车载电子产品关键技术标准、无线通信关键技术标准、面向车联网产业应用的5G eV2X 关键技术标准制定,满足产业发展需求。以自动驾驶等为代表的uRLLC业务是未来5G可能首先推广并落地应用的产业,也是近年5G试验的重要业务示范方向,其对网络侧的需求以及解决方案有待研究。
2 5G自动驾驶业务需求
自动驾驶是未来车联网的一项关键业务应用,国际自动机工程师学会(简称SAE)将自动驾驶分为L0~L5共6个级别,L0代表没有自动驾驶加入的传统人类驾驶,L5代表完全自动化,L1~L5则随自动驾驶的成熟程度进行细分,具体如表1所示。
在SAE的分类标准中,目前日常使用的大多数汽车处在第0级和第1级之间,自动防碰撞、定速巡航属于第1级的辅助驾驶,自动泊车功能介于第1级和第2级之间。
目前,车企研发的自动驾驶车辆仍处于单车智能的状态,没有车联网的支持,实现L5级别的全场景完全自动驾驶几乎是不可能,5G网络的商用将为未来自动驾驶应用提供更合适的契机,主要体现在更高的可靠性(99.999%)、非常低的端到端时延(空口1ms)、非常高的数据速率(1Gbit/s以上)。自动驾驶业务对移动通信网络的需求如图1所示。
3 5G自动驾驶业务网络架构
典型的5G自动驾驶业务网络实现架构分为终端层、网络层和平台层,如图2所示。
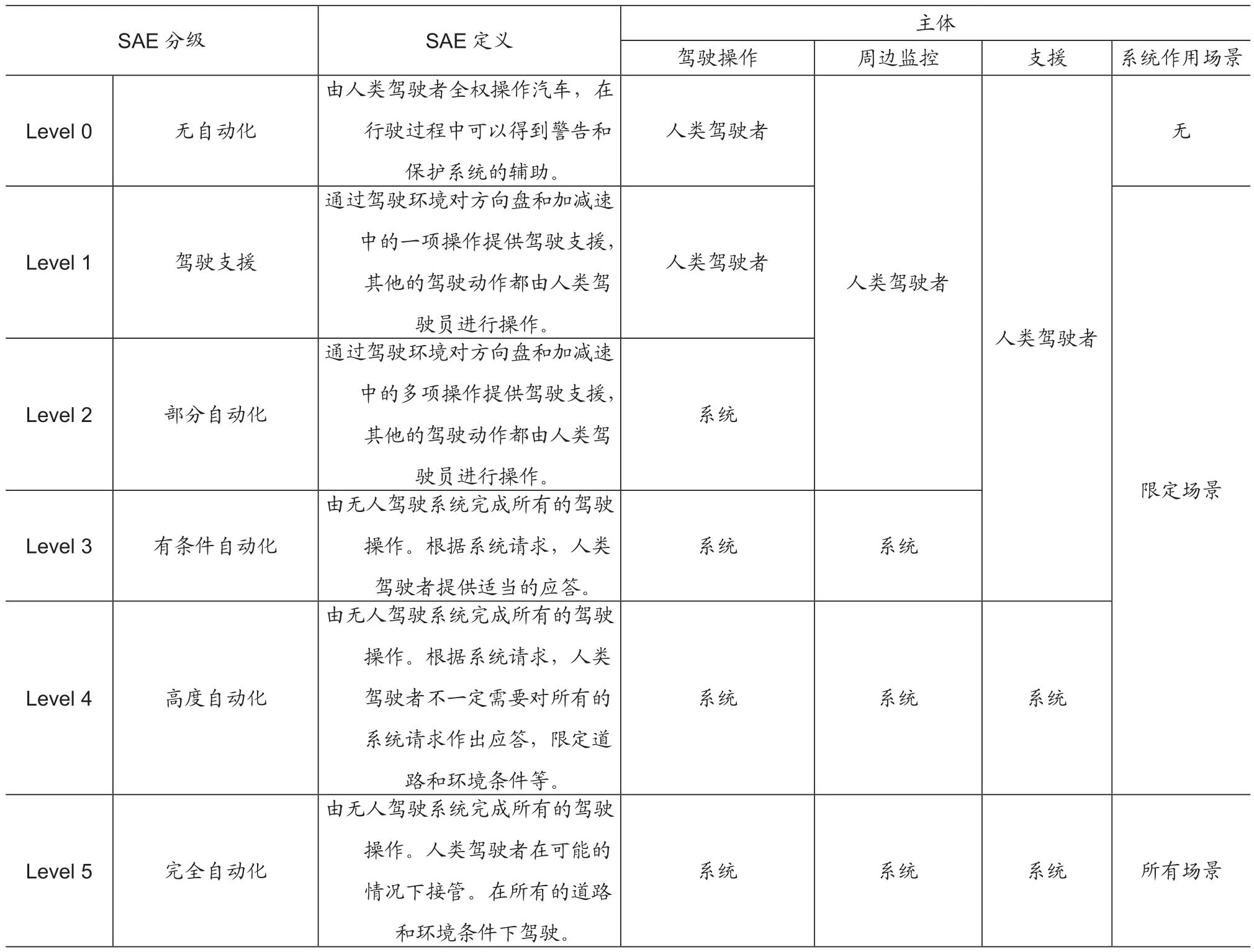
表1 SAE自动驾驶分级
终端层主要包括车辆及车载模组、协同式路边设施、告知型路边设施。车辆及车载模组主要包括车辆、车载通信模块、高精度定位模块、自动驾驶系统等。协同式路边设施主要部署在交叉路口、匝道口等位置,作为智能交通设施完成交通信息收集、上报、控制等功能,进一步发展可具备车车、车路协同能力,以及局部智能交通决策能力等。告知型路边设施主要部署在如急弯限速区域、施工区域等,以信息告知为主,如车速限制、施工告示、弯道告警。
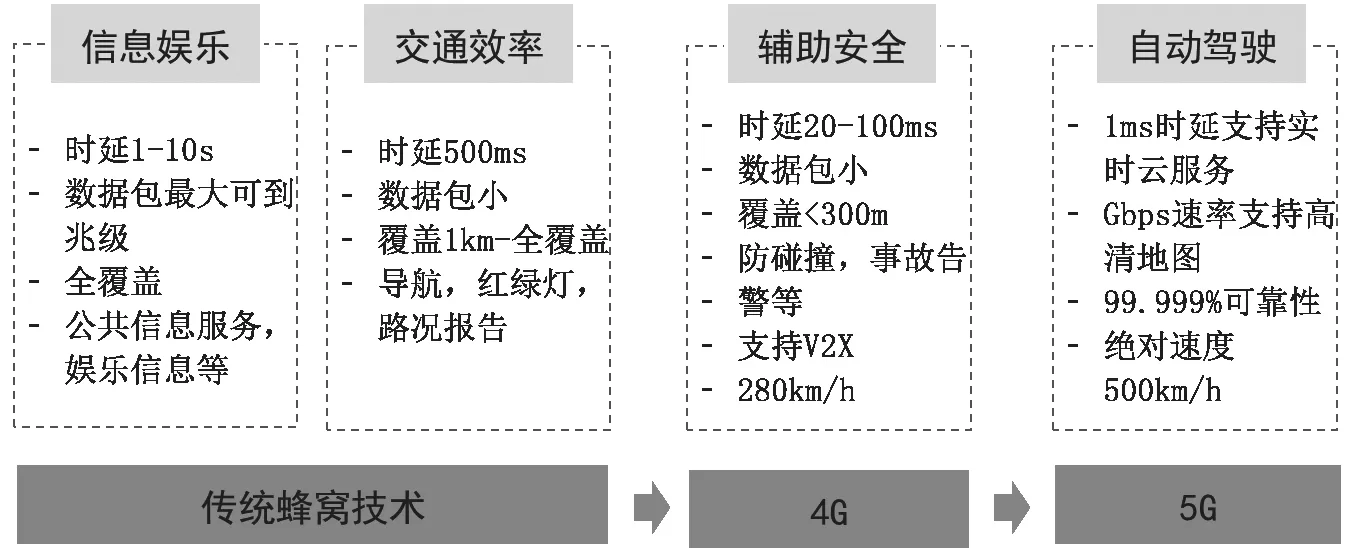
图1 移动通信网络适配自动驾驶业务需求示意
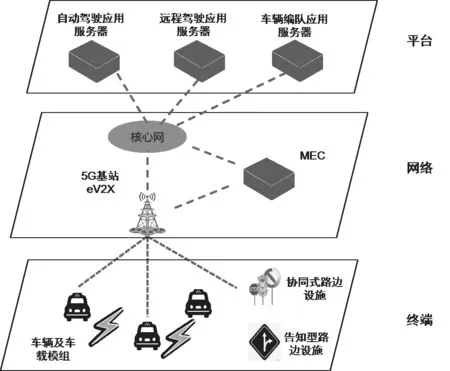
图2 5G自动驾驶业务网络实现架构
网络层主要由5G无线基站及传输、核心网组成,在有网络覆盖的情况下,可通过基站实现车车通信,而在无网络覆盖的情况下,可通过V2V实现车车之间直接通信。为了增强基于基站通信的低时延高可靠业务,加强对自动驾驶业务的掌控,根据业务需求在网络不同位置引入边缘云计算(MEC)[1],实现用户面的业务下沉,降低网络传输时延。在5G建网初期或业务试点时,MEC可部署在覆盖区域的站点机房,实现快速部署,针对特定用户群进行本地分流。远期通过核心网CU分离实现集中式控制面和分布式转发,将核心网的用户面功能下沉到MEC,结合针对业务需求的灵活策略,由核心网用户面负责MEC的数据转发,降低网络传输时延。
平台层主要用于部署各种业务应用服务器,完成信息娱乐、智能交通决策等功能,例如自动驾驶应用服务器、远程驾驶应用服务器、车辆编队应用服务器、智能停车应用服务器、高清视频应用服务器等。实际上应用服务器既可以部署在平台层,也可以部署在MEC上。
4 5G低时延技术保障手段
支持5G自动驾驶业务的协议标准将在3GPP R16中完成,其中超低时延是5G自动驾驶业务最关键的要求,以下将对5G网络低时延技术手段进行探讨。
移动通信系统时延主要包括:空口时延、承载网时延以及核心网时延,其中承载网时延、核心网时延相对较大。
4.1 空口时延保障
降低空口时延的技术手段主要包括超短帧、自包含子帧、V2V等技术。
(1)超短帧
用户面单向时延(DUP)可按公式计算[2]:DUP_typical(ms)=(4+p×8)×TTI,其中 p是数据传输出错概率(BLER),TTI是最小数据传输间隔。可以看出在p一定时,DUP与TTI成正比,为降低DUP,可减小TTI。对于4G系统,TTI固定为1ms,而对于5G系统的NR帧结构,TTI对应一个slot,采用不同的子载波间隔将对应不同的slot,如采用60KHz子载波间隔的帧结构,则TTI对应0.125ms(一个slot的长度),相比4G的1ms最小数据传输间隔缩短了88%,明显降低传输时延。
(2)自包含子帧
自包含子帧(Self-contained subframe)帧结构内包含UL/DL,即一个TTI中同时包含上行和下行信息,通过把数据的传输(transmission)和确认(acknowledgement)包含在一个子帧内,不需要跨时隙的确认(ACK),实现快速发现和解码,从而保障低时延。
(3)V2V技术
V2V(Vehicle-to-Vehicle,车辆间通信)基于D2D(Device to Device,设备间通信)技术[3][4],从3GPP R12和R13版本的短距离通信服务(ProSe,Proximity Services )演进,期间引入发现(Discovery)机制,在R14 LTE-V2X技术中定义了D2D的新交互空口,即PC5(物理层对应SideLink),通过PC5实现终端间的直接通信,实现车辆与周边车辆和路侧基础设施的低时延、高可靠通信,满足碰撞预警、紧急避让等辅助行车安全性应用要求。
4.2 承载网时延保障
承载网时延一般相比空口时延更大,现网实测网络轻载端到端时延约2~3 ms,所以更需要尽量控制。一方面进一步降低设备处理时延,一方面降低转发时延,如通过FlexE交叉或者光层直通提供低时延转发通道。802.1TSN+低时延转发,设备转发延时可下降一个数量级,达到5-10μs级别;采用Flex带宽隔离技术,设备转发时延最低可到百纳秒级。除去设备处理与转发时延外,承载网时延主要取决于传输距离,将在4.3节具体介绍。
4.3 核心网时延保障
核心网时延相比空口时延、承载网时延更大,甚至可达s级,因此降低核心网时延是保障5G端到端时延的一个重要环节。核心网时延保障手段主要包括核心网功能下沉以及边缘计算技术(MEC)。
(1)MEC
基于本地缓存、本地应用、业务优化、数据服务等业务需求,业界提出MEC(边缘计算)概念,通过本地化具备计算能力来满足低时延、传输节省、创新业务(如CDN)等目的。MEC将业务能力部署到网络边缘,实现应用与无线网络更紧密的结合,缩短数据处理时间和传输时延。关于MEC在第3章已有阐述。
(2)核心网功能下沉
5G核心网控制和转发分离,进一步扁平,控制更加集中,用户面简化,可分布式部署。将核心网控制功能集中部署、集中管控、集中优化,简化信令拓扑,提升信令处理效率;核心网转发平面进一步简化下沉,根据不同场景结合业务需求按需分散部署,同时将业务相关的数据存储和计算功能下移到网络边缘,以满足低时延的业务要求。可以看出,对于5G自动驾驶等低时延业务,用户面下沉的边缘位置非常重要,要求尽量靠近用户侧,以节省传输距离带来的时延。通过对传输时延分析,假定业务汇聚机房至基站距离10公里,业务汇聚机房至普通汇聚机房30公里,普通汇聚机房至重要汇聚机房80公里,SPTN设备转发时延10μs,光纤时延5μs/km,对于uRLLC业务,传送网时延不超过0.125ms,则用户面应下沉至业务汇聚机房以下,同时配合MEC的部署,以尽可能满足端到端低时延需求。

图3 传输时延与业务下沉位置示意
5 结束语
5G新技术是当前业界研究的焦点,5G自动驾驶等uRLLC业务是当前业界正在探索的5G应用方向,本文主要介绍了自动驾驶业务对5G网络的需求,5G自动驾驶业务网络实现架构,探讨了相关低时延保障技术手段,对未来5G自动驾驶业务的网络实现提供一定的参考意义。