基于三轴云台的飞行仿真器精度验证试验设计
2019-02-25 10:55:50曾科军
兵器装备工程学报 2019年1期
曾科军
(中国人民解放军92124部队, 辽宁 大连 116023)
在飞行器研制阶段,需对飞行器各项性能指标进行考核,其中包括飞行器的位置、速度、加速度等飞行轨迹参数。在飞行器外场飞行试验中,一般使用光学、雷达等测量设备对飞行轨迹参数进行测量[1-3],而受限于测量设备的性能、测量原理及测量环境,测量数据误差较大,需要建立相应的误差模型对误差进行修正,以提高测量数据精度[4-6]。
为解决上述问题,通常采用实验室仿真试验的方式,利用飞行仿真器对目标运动状态进行模拟及测量,并对测量数据进行分析研究,从而达到提高外场飞行试验数据的使用效能、有效降低飞行器研制的时间及经济成本的目的。
飞行仿真器的研制始于20世纪40年代的美国,随着航空工业的发展,各国相继开展了相关研究工作。目前,以美国的CGC公司和德国的西门子公司技术水平最为先进。我国于20世纪60年代开始飞行仿真器的研制,其中,具有代表性的单位有哈尔滨工业大学、南京航空航天大学、中国船舶工业第6354研究所等,尽管经过近50年的发展,但国内企业在制造工艺、定位精度等方面,与欧美同行仍存在不小差距。
根据输出测元类型进行分类,飞行仿真器分为仿真转台和仿真云台两大类。仿真转台主要对飞行器的偏航、翻滚、俯仰等姿态参数进行模拟及测量,仿真云台则主要对飞行器的位置、速度、加速度等运动参数进行模拟和测量。飞行仿真器定位控制精度决定了飞行仿真器的应用效能,因此在飞行仿真器研制完毕后需对其控制精度进行考核,本研究针对基于三轴云台的飞行仿真器控制精度考核,进行试验方案设计[7,8],并对仿真试验结果进行了分析。
1 飞行仿真器
基于三轴云台的飞行仿真器主要由移动机械支架和伺服控制系统组成。为了精准模拟飞行器的运动轨迹及运动姿态,实验室在综合衡量系统可靠性和精确性的基础上,选用了硬质合金钢性材料作为机械支架的主体材料,其设计参数指标如表1所示。

表1 移动单元机械支架设计参数指标
为确保飞行仿真器的控制精度,实验室使用西门子SINUMERIK 808D全套数控伺服系统进行机械单元的伺服控制系统设计,并使用三组Sinamics V60驱动器和Simotics 1FL5伺服电机组合形成的目标驱动模块。飞行仿真器运行时,目标运动控制信号通过脉冲方向接口传送到驱动器,同时电机编码器输出反馈信号与驱动器形成控制闭环,实现控制X、Y、Z三轴精确联动[9]。
2 缩比飞行轨迹设计
由表1可知,飞行仿真器的最大行程为10 m、最大移动速度为0.4 m/s,远远低于飞行器实际飞行距离及飞行速度,因此在利用飞行仿真器对飞行器真实飞行轨迹进行模拟时,需要按一定规则对飞行轨迹进行缩比。本研究编写了一套缩比飞行轨迹制作软件,使用飞行试验实测参数作为数据驱动,按照用户选定的缩比方式及三轴行程范围,制作适用于飞行仿真器的缩比飞行轨迹。缩比飞行轨迹制作软件界面如图1所示。
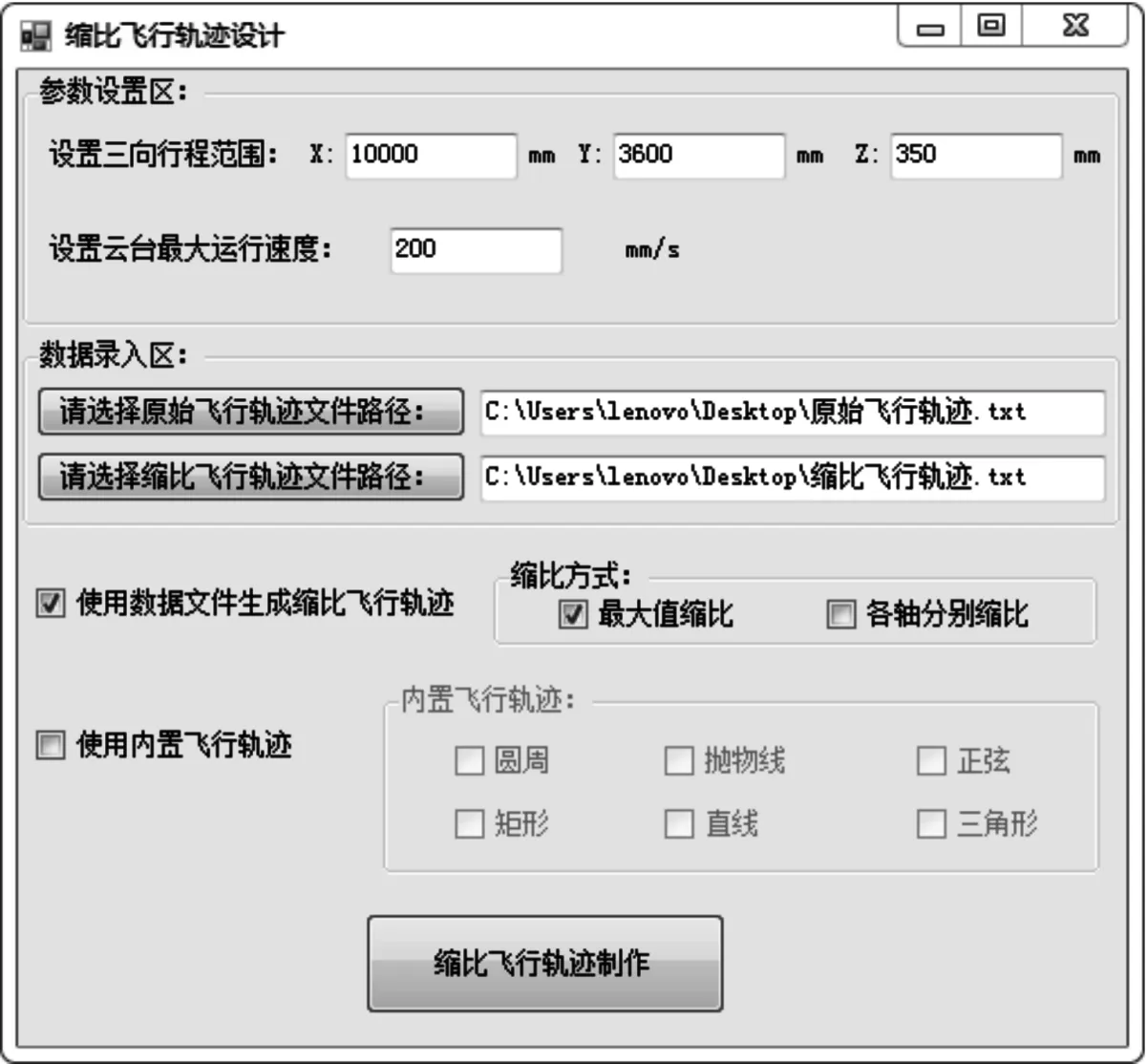
图1 缩比飞行轨迹制作软件界面
软件提供了两种缩比方式供用户选择,分别为“最大值缩比”及“各轴分别缩比”。“最大值缩比”模式,根据原始飞行轨迹各飞行方向与云台各轴行程之比的最大值,确定统一的缩小比例对飞行轨迹进行缩比;“各轴分别缩比”模式,云台各轴分别确定缩小比例。同时,软件提供了圆周、抛物线、矩形、直线等内置飞行轨迹供用户选择。图2为缩比飞行轨迹设计流程图。
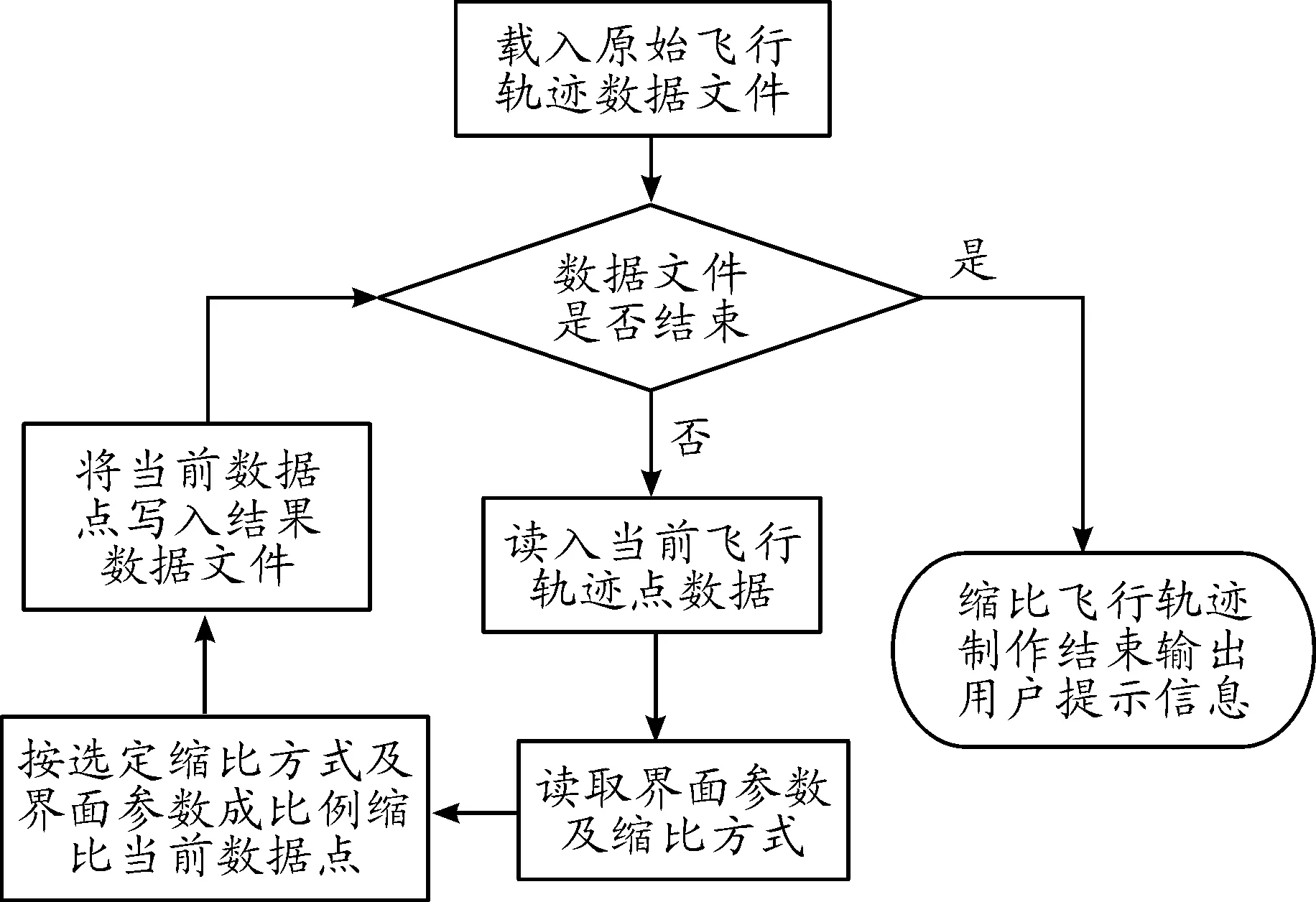
图2 缩比飞行轨迹制作流程
3 试验方案设计
根据实验室现有测量条件,测量仪器选用具备测距和测角功能的全站仪,其有棱镜条件下测角精度为1″,测距精度为2 mm+2 pmm。
目标点测量原理示意图如图3。首先,通过对定标点的精确测量确定全站仪坐标系及其与桁架坐标系的转换关系;而后,利用全站仪对目标点(图中的“棱镜点”)进行测量,确定目标点在全站仪坐标系下的坐标;最后,通过坐标系平移和旋转解算得到目标点在桁架坐标系下的坐标。
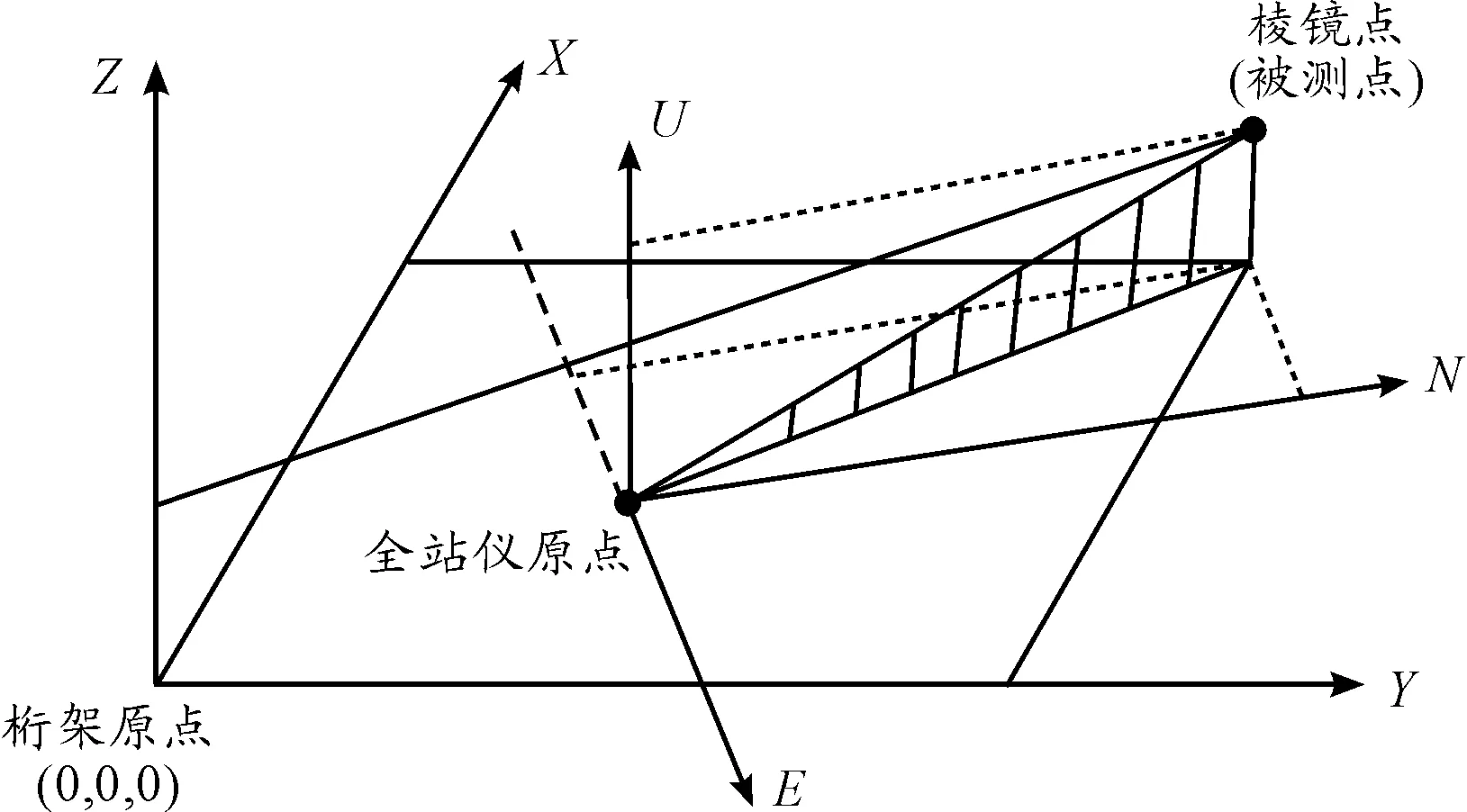
图3 测量原理示意图
外场飞行试验是考核飞行器性能指标最直接最有效的手段,因此,在实验室仿真试验中,以外场飞行试验测量数据为模板,使用本文第二节中提出的缩比飞行轨迹设计软件制作缩比飞行轨迹,可最大程度复现飞行器外场飞行状态,有利于后续研究工作的开展。
在对某型飞行器外场飞行实测飞行轨迹数据进行预处理后,采用“最大值缩比”的方式设计仿真用缩比飞行轨迹,具体参数配置如表2所示。应用上述配置信息,生成图4所示的缩比飞行轨迹,再将该飞行轨迹逐点转换为PLC控制程序语句,即可实现对飞行仿真器的控制。
飞行器仿真器试验主要包括设备标定及参数设置、云台运行控制、测量及数据记录三部分。首先是棱镜安装、云台坐标系归零、全站仪标定、驱动数据(即缩比飞行轨迹)装载、云台运行参数设置等试验前准备工作;然后开始模拟飞行试验,并在云台运行至设定点时,对目标点的位置参数进行测量,同时做好目标点测量数据及控制台显示数据的记录;云台恢复运行至下一被测点,重复上述测量及数据记录过程直至试验结束。仿真试验流程如图5所示。

表2 缩比飞行轨迹设计参数
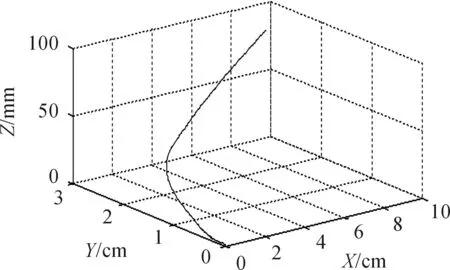
图4 缩比飞行轨迹三维示意图
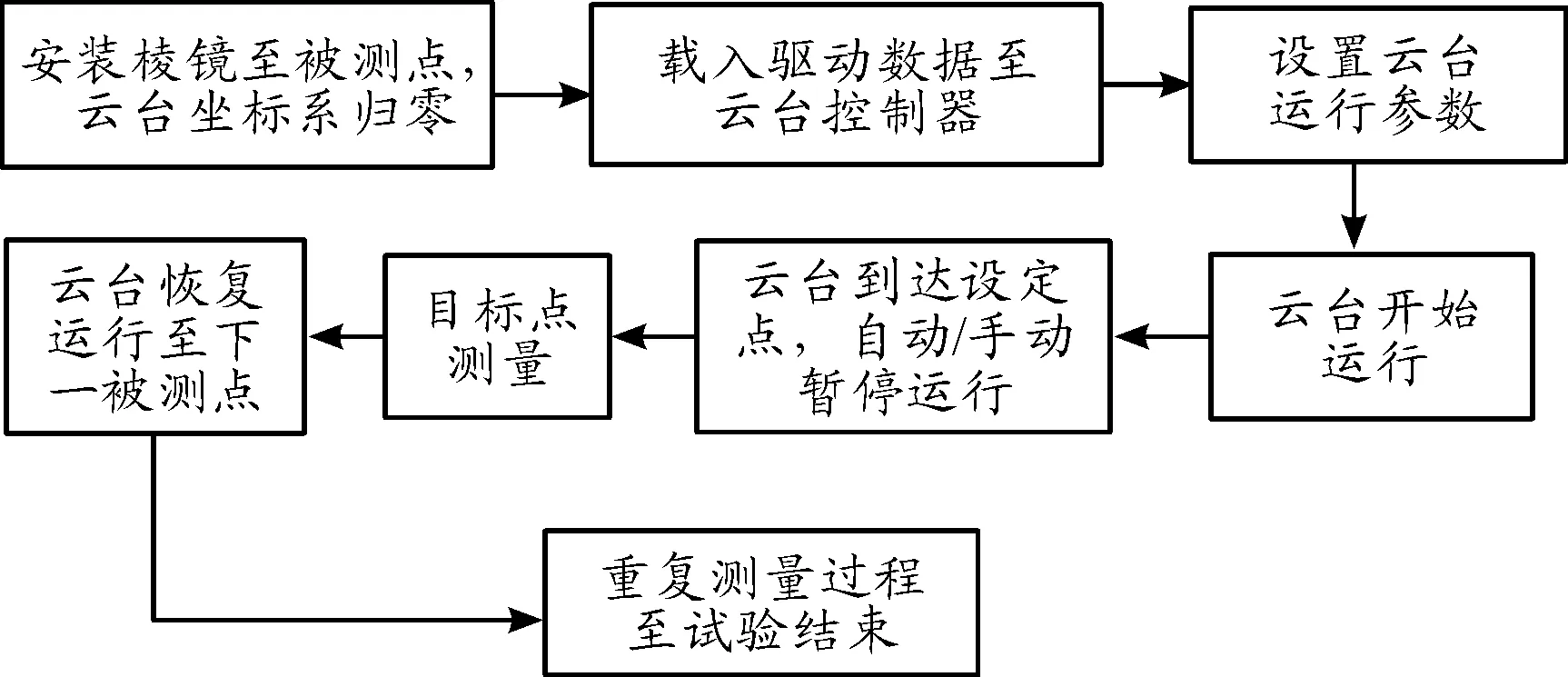
图5 仿真试验流程
4 仿真试验与结果分析
为验证本文设计试验方案的可靠性,利用3.2节设计的缩比飞行轨迹对飞行仿真器进行驱动,并通过手动暂停云台运行的方式选取5个特征点进行测量。将测量数据与云台控制台显示的飞行轨迹设计坐标进行比对分析,即可由误差特性对本研究提出的试验方案的合理性进行判定。
表3为5个特征点的测量结果、设计坐标及误差情况,从表3中可以看出,5个特征点的坐标测量误差最大值为0.12 mm,最小值仅为0.01 mm。统计分析可知,误差的均值和标准差分别为0.043 mm、0.032 mm,轨迹测量结果与设定轨迹的吻合度较高。

表3 缩比飞行轨迹特征点测量结果
5 结论
仿真试验结果表明,本文设计的试验方案合理可靠,试验结果数据精度较高,可用于误差模型修正、数据处理技术优化等后续研究工作,为飞行器研制工作提供了新的思路。
猜你喜欢
现代装饰(2022年6期)2022-12-17 01:10:30
现代装饰(2022年6期)2022-12-17 01:09:42
摄影之友(影像视觉)(2020年2期)2021-01-14 05:34:28
北京测绘(2020年12期)2020-12-29 01:37:18
工程与建设(2019年3期)2019-10-10 01:40:18
电子制作(2019年23期)2019-02-23 13:21:16
电测与仪表(2016年9期)2016-04-12 00:29:52
计算机工程(2015年4期)2015-07-05 08:28:57
河南科技(2014年5期)2014-02-27 14:08:32
测绘科学与工程(2013年2期)2013-03-11 15:07:29