高寒地区高速铁路路基冻胀远程监测
2019-02-22 09:13:24朱力强闻志强邬成健
铁道学报 2019年1期
朱力强,闻志强,邬成健,王 尧
(1.北京交通大学机械与电子控制工程学院,北京 100044;2.北京交通大学载运工具先进制造与测控技术教育部重点实验室,北京 100044)
高速铁路路基的稳定和变形控制是列车高速平稳运行的基础[1-2]。在季节性冻土地区,不仅要控制路基的沉降变形,同时还要控制路基的冻胀变形。相关标准要求路基冻胀的最大值应控制在15 mm以内[3]。自2012年12月1日世界上第一条季节冻土地区高速铁路——哈大高速铁路开通运营以来,我国东北季节冻土地区的盘营、哈齐、长珲、沈丹高速铁路和西北季节冻土地区的兰新高速铁路相继开通运营,季节冻土地区高速铁路的运营里程已经超过3 000 km。以哈大高速铁路为例,最冷月平均气温-23.2~-3.9 ℃,土壤最大冻结深度93~205 cm,每年的10月开始冻结,至次年的4—5月全部融化[4]。采取一系列路基防冻胀措施后,负温期路基普遍存在约5 mm冻胀,个别区段出现了近20 mm的冻胀变形[5]。因此,在严寒、低温、高速条件下,可靠有效地进行路基冻胀监测、查找冻害位置以及掌握高速铁路路基冻胀规律是非常必要的。
目前,国内外非常重视高速铁路路基冻胀监测的研究,研发了多种监测技术。文献[6]采用观测桩测量路基表面冻胀,实施简便,缺点是只能测定结构的外表面冻胀值,不能测定结构体内部某一位置冻胀。文献[7]使用水平测斜仪监测路基冻胀变形,测量精度高、携带方便、受天气变化影响小,缺点是制作成本高,容易断裂失效。文献[8]采用合成孔径雷达差分干涉测量技术监测路基冻胀变形,具有监测面积大、时空分辨率高、可全天候工作等优点,缺点是精确度不高,不便于长期监测。文献[9]采用GPS监测法监测路基冻胀变形,精度高、速度快、可全天候工作,缺点是监测成本高,技术还不够成熟。
综上所述,现有高速铁路路基冻胀的监测方法均有其使用的局限性,亟需一种操作简易、能够实现自动化无损监测的方法。近年来,随着激光器单色性、方向性等性能的提高,通过激光测量位移的光学非接触测量技术日渐成熟。其以光电转换元件为桥梁,将像光转换为电信号,通过对电信号的采集、处理、分析得到像光位移量,依据像光与被测对象确定数学关系,可进一步实现对被测对象位移、距离、角度等几何量的测量[10]。作为一种常用的光电转换元件,位置敏感元件(PSD)能够测量连续特性,具有高灵敏度、高位置分辨率和极好的瞬态响应特性,以及对光束外形质量要求相对较低等特点,在非接触位移测量等领域具有一定的优势[11]。本文提出一种基于PSD的非接触式高速铁路路基冻胀远程监测方法,重点解决了野外光线变化和东北地区大温差对监测精度影响这一问题,具有安装方便、成本低、测量精度高等优点,适合路基冻胀变化过程的长期在线监测。
1 冻胀监测原理
本文提出的路基冻胀测量方法主要利用激光器、反射棱镜和位置敏感元件(PSD),形成一种非接触式的位移检测,其原理见图1。反射棱镜固定在冻胀监测点(如底座板)上,包含激光器和PSD的光电测量装置安装在线路的基准点上。当监测点由于冻胀产生相对于基准点的高度变化时,激光器发射的激光经过棱镜反射后在PSD上的照射位置也会发生变化。这里的基准点可以采用CPⅢ观测桩,由于其地基较深,该处的冻胀量可忽略不计,因此通过测量反射激光点在PSD上的位置,即可获得监测点与CPⅢ之间的高程变化,也就是路基冻胀值。这种棱镜反射式测量可以将测量系统主体与路基分离,保证系统不会对高速铁路线路的正常运行产生干扰,同时也增强了系统测量结果的准确性和稳定性。
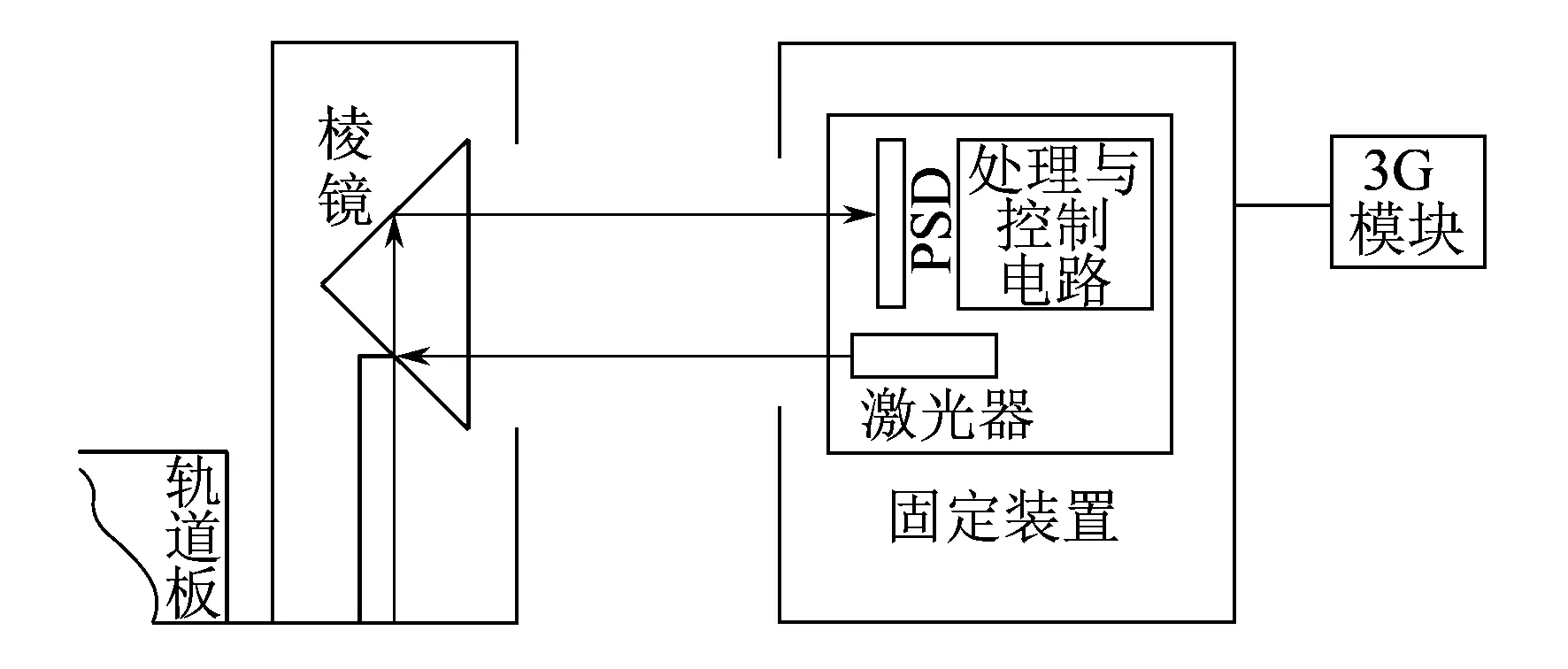
图1 系统测量原理示意图
根据实际需求,冻胀监测范围应达到±30 mm,测量精度需达到0.2 mm。由于路基冻胀主要在垂直方向上产生位移变化,所以选用欧光(OTRON)公司生产的一维PSD元件PSD0375,其有效光敏面积为3 mm×75 mm,量程75 mm,测量精度可达到微米级。
考虑到现场安装条件的限制,实际测量光路与理论光路会有偏差,设备安装后还需要进行现场标定,可将PSD与激光器固定在一个垂直安装的位移台上,利用位移台的读数直接获得冻胀位移与PSD输出的关系曲线。为了验证标定后系统的测量精度,在实验室精密光学平台上搭建了测试系统,见图2。在无光线和温度波动的实验室条件下,调节电动位移台,使反射棱镜与光电检测装置之间产生高度变化。在-10~10 mm的垂向变化范围内,每间隔1 mm设置一个测量位置,共计21个测量位置。均匀选取其中10个位置的测量数据作为系统标定数据,剩余11个位置作为验证数据,结果见表1。其中,给定值为电动位移台数值,定位精度为1 μm。由表1数据可知,标定后的系统测量精度基本可达到0.05 mm。
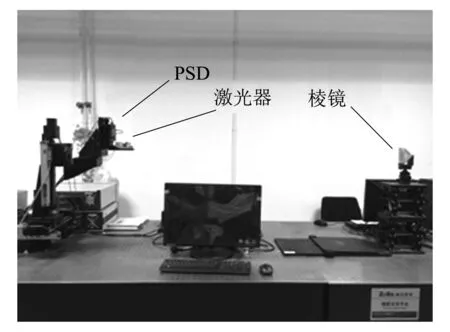
图2 标定测试系统

给定值测量值误差-10.012 5-10.009 50.003 0-8.012 5-7.926 50.086 0-6.022 5-5.958 70.063 8-4.002 5-4.040 9-0.038 4-2.010 0-2.022 9-0.012 9-0.020 0-0.056 4-0.036 42.000 02.098 40.098 44.000 03.976 5-0.023 56.005 05.994 1-0.010 98.012 57.975 7-0.036 810.040 010.056 00.016 0
注:误差标准差为0.050 3 mm。
虽然PSD0375在标定后的位移测量精度仍远高于0.2 mm,但是监测设备受到现场光照变化与环境温度变化的影响,精度会进一步损失,这也是本文研究的重点和难点。
2 背景光变化的补偿方法
2.1 背景光对PSD的影响
一维PSD的工作原理基于横向光电效应[12-16],其等效结构和等效电路见图3。由于环境背景光和测量激光都通过光电效应对PSD的输出产生影响,因此背景光变化必将影响系统的最终测量精度。
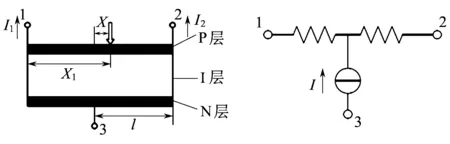
(a)等效结构 (b)等效电路图3 PSD等效结构和等效电路
当只有激光照射在PSD有效检测面上时,其输出的总光电流为I0,见图4。如果照射光源稳定、非时变,则由Lucovskey方程和文献[17]给出的解可得到PSD左侧输出电流
∬ΩJph(x0,y0)dx0dy0-
( 1 )
式中:I1为PSD在只有激光照射时左侧电极输出的电流值;积分区域Ω为光斑在PSD敏感面上的覆盖范围;Jph(x0,y0)为光斑覆盖范围内任意点(x0,y0)的光电流密度;l为PSD长度的一半;xG为激光作用的等效坐标点。类似地,可以求解PSD右侧电极输出电流
( 2 )
由式( 1 )、式( 2 )推导可得
( 3 )
由式( 3 )可以看出,xG即为激光光斑的光强重心坐标。这说明PSD电极输出电流反映的位置坐标就是光斑的光强重心,因此通过测量电流I1和I2,即可计算出激光光斑位置,见图4。
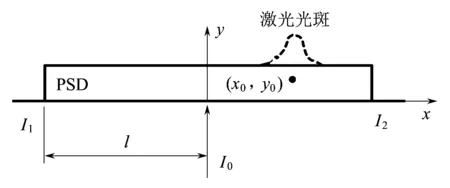
图4 只有激光照射时PSD等效图
需要指出的是,不同观测距离时,激光器在PSD上照射的光斑大小会发生改变,距离越远,光斑越大。对于高速铁路路基冻胀监测系统,激光传播路径的长度主要取决于CPⅢ观测桩到轨道底座板侧面的水平距离,一般为2 m左右。本文选用的激光器为LASERWAVE公司生产的LWRL637红光激光器,发射角小于1 mrad,在PSD上的光斑半径约为1.5 mm。理论上,激光光斑的光强一般服从高斯分布,因此光斑直径的大小与光强重心的位置无关。但是在实际应用中,激光光斑的光强分布不是绝对的高斯分布,特别是光路中的反射棱镜会带来一定畸变。因此,随着测量距离的增加,激光光斑的光强分布可能会发生变化,从而导致其等效光强重心发生变化。对于本测量系统,安装完成之后的测量距离不再发生变化,因此照射到PSD上的激光光斑大小及其光强重心的位置也是稳定的。对于高速铁路线路的不同监测地点,CPⅢ观测桩与轨道的水平距离基本相同,因此可以实现一致的测量精度。
只有背景光照射到PSD时,其作用形式与激光相类似,见图5。此时的背景光可以看作覆盖整个PSD敏感面的均匀大光斑,可以推导得出
( 4 )
( 5 )
式中:Ib为只有背景光照射时PSD输出的总光电流;I1b为PSD在只有背景光照射时左侧输出的电流值;I2b为PSD在只有背景光照射时右侧输出的电流值;xGb为背景光的等效光强重心坐标。

图5 只有背景光照射时PSD等效图
当背景光均匀非时变时,即Jphb(x0,y0)是一个常值时,其等效坐标公式为
( 6 )
式中:积分区域Ψ为背景光在PSD上的照射范围,即PSD整个敏感面;Jphb(x0,y0)为背景光照射时的光电流密度。所以,当背景光均匀时,其等效光强重心的坐标为0,如果非均匀背景光作用,其等效重心坐标在y轴的左侧或者右侧。
当激光和背景光共同照射在PSD上时(图6),则有
( 7 )
( 8 )
式中:x为背景光和激光共同作用时的等效光强重心坐标;I为背景光和激光共同作用时PSD的输出总光电流;Ix为PSD左侧输出电流;Iy为PSD右侧输出电流。
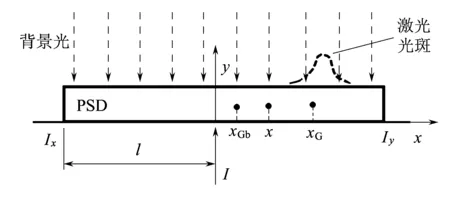
图6 激光和背景光共同照射时PSD等效图
由式( 7 )、式( 8 )可知,存在背景光时,由Ix和Iy计算得到的PSD输出位置为相应的背景光和激光共同作用时的等效光强重心坐标,与激光的光强重心坐标不重合,测量结果存在误差。
2.2 背景光补偿算法
由式( 4 )、式( 5 )、式( 7 )、式( 8 )可以得到PSD在激光照射下输出真值
( 9 )
由式( 9 )可知,只要测得激光与背景光同时影响下PSD输出总光电流值I以及等效光强重心x,并测得PSD只在背景光影响下输出总光电流Ib和等效光强重心xGb,即可求得PSD在只有激光光源照射时的真值,实现对PSD的光照补偿。
基于上述分析,本文提出采用采样-保持法实现背景光的消除。在一次测量中,首先关闭激光光源,测得系统在环境背景光影响下PSD的输出总光电流Ib和等效光强重心xGb;打开激光光源,测量系统在激光光源照射与环境背景光共同作用时PSD的输出总光电流值I以及等效光强重心x;最后,利用式( 9 )对信号进行处理获得PSD输出信号补偿值,即可完成对PSD输出信号的补偿,获得PSD仅在激光光源照射下的真值,提高系统测量准确性。
2.3 背景光补偿效果验证
为了研究背景光对PSD输出的影响,验证提出的背景光补偿算法,在试验环境温度不发生变化的前提下,通过调节实验室的灯光亮度来模拟弱背景光和强背景光,测试环境见图2。在强、弱背景光条件下,调节电动位移台在-10~10 mm间上下移动,每间隔1 mm进行一次测量,PSD光照补偿试验数据见表2。
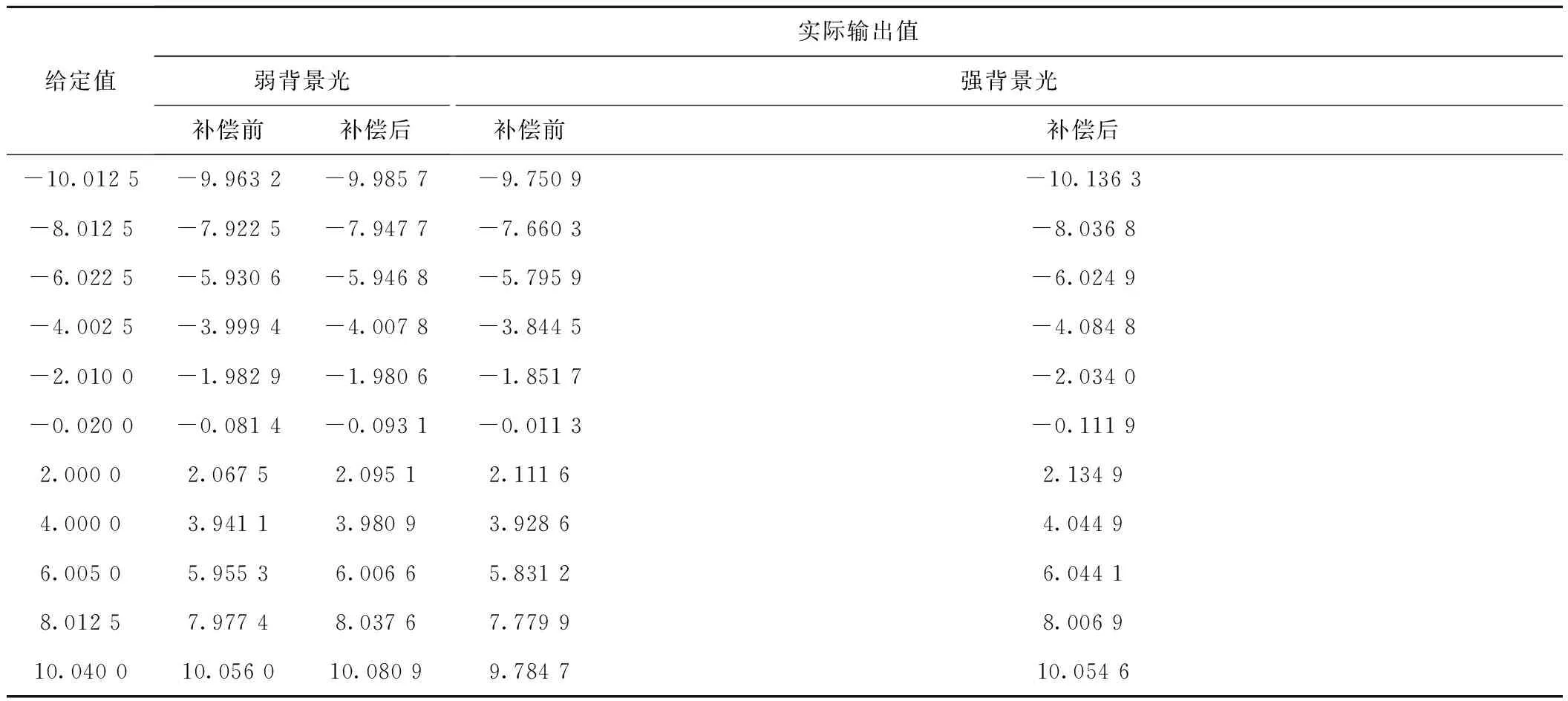
表2 PSD光照补偿试验数据 mm
注:弱背景光下补偿前和补偿后的误差标准差分别为0.058 0,0.047 3 mm,强背景光下补偿前和补偿后的误差标准差分别为0.208 3,0.072 4 mm。
由表2可以看出,PSD在经过光照补偿之后的输出值明显更接近试验给定值。在强背景光条件下,补偿前数据误差的标准差近似为补偿后的3倍,说明了对PSD进行光照补偿的必要性,同时也验证了本文提出的光照补偿算法能明显提高PSD在可变环境背景光影响下的测量精度。
3 环境温度影响分析
环境温度对监测系统的电路和光路都产生潜在的影响。当环境温度超出电路元器件工作温度范围时,电路可能失效。因此,一方面需要选择宽工作温度范围的军用级器件,同时可以在电路板中增设自动加热装置,使电路板温度始终保持在适宜范围内。
环境温度对监测系统的光路也会产生影响。由于材料存在热胀冷缩现象,系统装置的机械结构在温度变化时可能产生变形,导致光路产生额外变化,进而影响测量精度。因此,在机械结构设计中,需要充分考虑材料温度变形对光路的附加影响。
3.1 机械安装结构的优化设计
系统装置的机械安装结构分为两个部分:(1)棱镜固定于全方位云台上,棱镜与云台整体安装在与轨道板一体的路基上,设置云台是为了便于根据实际安装位置调整棱镜的姿态角,与激光器、PSD形成闭合光路;(2)激光器与PSD测量电路固定在可锁闭的手动位移台上,位移台通过固定板固定在CPⅢ 观测桩上。设置位移台是为了方便现场标定。
路基冻胀监测系统的安装示意见图7,编号1~6分别为法兰盘、球形云台、棱镜固定台、PSD安装板、手动位移台、大支撑板,以上均为铝合金材料。编号1~6构件的高度分别为30,107,60,140,100,380 mm。由于金属的线性热膨胀系数不是一个固定的数值,随着温度的升高而增大,考虑系统应用时处于冬季与春季,所以取20 ℃时铝合金的线性热膨胀系数23.8×10-6m/℃作为参考值,同时,低于30 ℃时玻璃的热膨胀系数为0,所以不考虑棱镜本身的影响。因为激光收发装置安装在CPⅢ立柱的高度与测量装置安装的轨道板底座等高,因此可以忽略混凝土热胀冷缩对系统的干扰。当温度每降低1 ℃时,编号1~6构件收缩量分别为7.14×10-4,2.546 6×10-3,1.428×10-3,3.332×10-3,2.380×10-3,9.044×10-3mm。由此可近似计算出每降低1 ℃,系统产生的相对收缩值为
k=(9.044+2.380+3.332)×10-3/2-
(0.714+2.546 6+1.428)×10-3
=2.689 4×10-3(mm)
(10)

图7 系统安装示意
假设初始标定温度为15 ℃,当温度降低至-25 ℃后,由于材料冷缩带来的测量误差约为0.108 mm。
3.2 系统温度特性验证
为了验证上述分析的准确性,本文利用温控箱进行环境温度模拟试验。首先,将棱镜与检测系统安装于同一平台上。为了消除系统自身之外的可能影响输出结果的干扰因素,平台使用热膨胀系数足够小的铟瓦合金材料,其热膨胀系数极低,一般为1.5×10-6m/℃,而且在-80~100 ℃范围内均不发生变化,能在较宽的温度范围内保持固定长度,排除了系统自身之外的可能干扰因素,提高试验结果的可靠性。系统温度试验设备安装示意见图8,实物见图9。

图8 系统温度试验安装示意
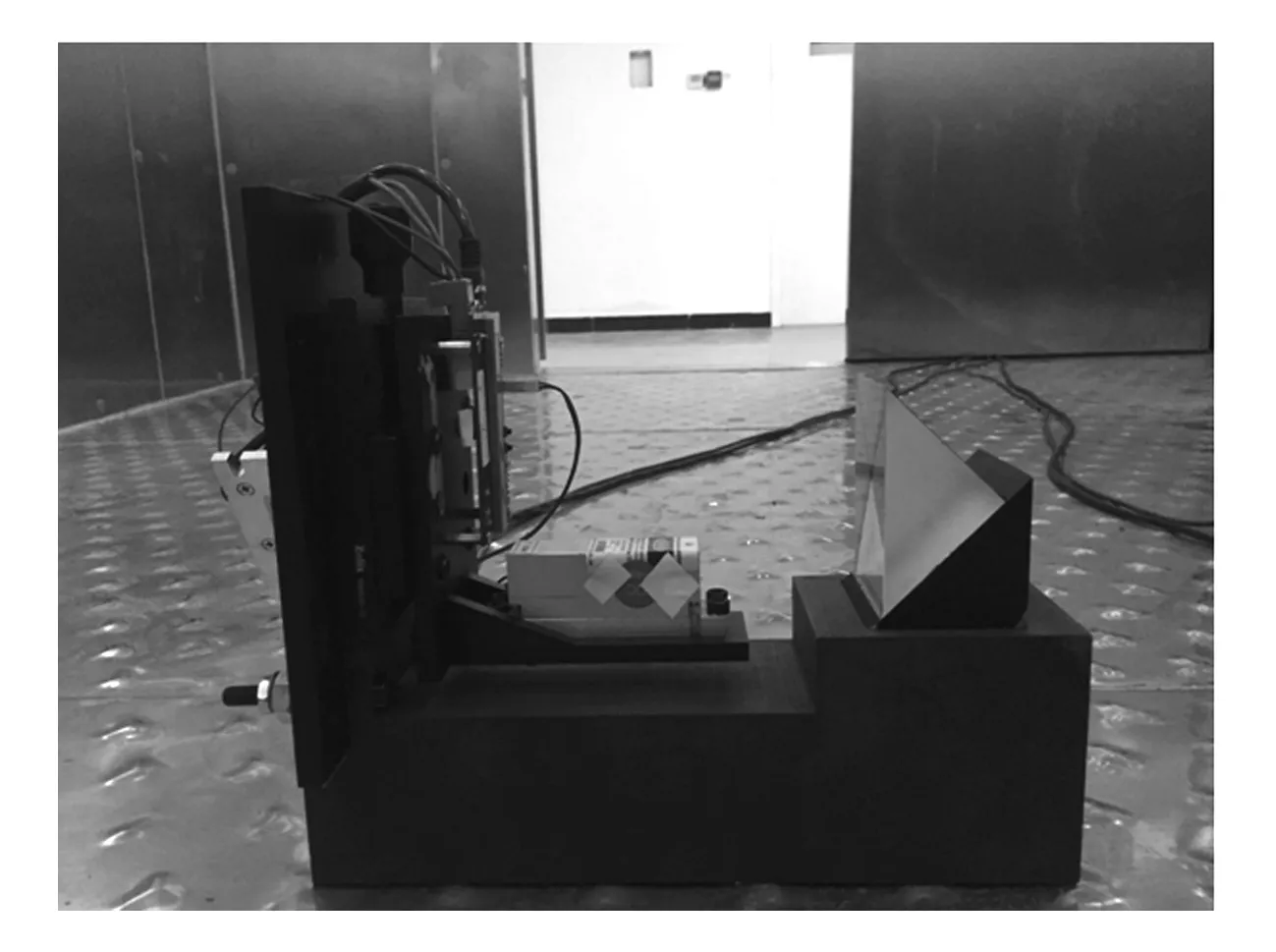
图9 系统温度验证试验
为了模拟系统在高寒地区的测试环境,同时验证系统在低温下的工作状态,试验中将温控箱温度从15 ℃降到-5 ℃再降至-25 ℃。由于温控箱内部无任何光照,所以忽略背景光对系统温度试验结果的影响。试验数据结果见图10,系统输出值xG的最大偏差约为0.08 mm,与理论分析值0.108 mm很接近,考虑理论计算时取得的线性热膨胀系数较大,所以0.08 mm的偏差是可信的。该试验同时也验证了系统装置在-25 ℃环境下仍然可以正常运行。

图10 系统温度验证试验数据曲线
4 远程监测系统现场试验
基于棱镜反射原理的远程监控系统主要包括上位机和下位机两部分。下位机由路基冻胀测量系统、信号处理系统、无线通信系统以及电源系统等4个子系统构成,系统整体结构见图11。冻胀是一个缓慢积累的过程,同时考虑系统节能,经过试验确定系统每间隔1 h测量1次即可达到较好的测量效果,同时也可以利用相邻时刻测量结果排除列车振动造成的干扰。测量时控制器每隔1 h产生信号控制激光器发出激光照射到棱镜上,棱镜将激光反射到PSD上。PSD受激光照射处产生相应电流信号,电流信号通过信号处理电路后进入控制器中,控制器处理后将冻胀数据存于本地SD卡中,并通过3G模块连接无线网络实时传输到上位机。上位机可通过无线网络控制下位机电路,检查其工作状态,并获取下位机上传的路基冻胀实时数据,完成显示、存储及超限报警等功能。

图11 系统总体结构框图
路基冻胀远程监测系统安装在哈齐高速铁路肇东界,哈齐高速铁路的年最低温度在1月,约为-25 ℃,日均温差11 ℃左右。系统由太阳能发电系统供电,安装现场见图12。为了测试背景光补偿算法的有效性,利用固定激光器和PSD电路板棱镜的手动平移台(行程为50 mm,精度为0.01 mm),模拟不同程度的冻胀值,对比补偿前后的冻胀检测数据,补偿算法可以实现1~2倍的精度提升,与表2的实验室验证效果类似。

(a)检测系统现场安装

(b)太阳能电池板安装图12 系统现场安装示意
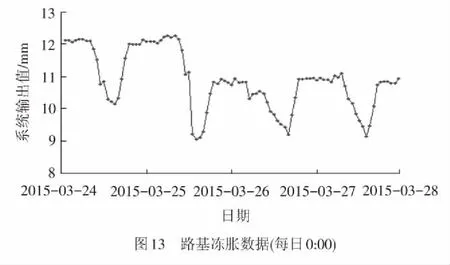
在2015年2月6日至2015年5月7日期间的现场连续监测试验中,环境最低温度达到-28 ℃,系统一直处于正常运行状态。路基冻胀监测数据随每天气温变化呈周期性波动,图13为2015年3月24日0时至2015年3月28日0时共4 d的数据。需要指出的是,本系统的冻胀输出值是相对于一个标定零点的相对位移变化量,冻胀输出值曲线上升代表冻胀加剧,下降代表冻胀消退。由图13可以看出,路基冻胀从每天上午8时至下午6时都出现明显波动,并在14:00达到峰值,随后逐渐恢复稳定。因为白天在太阳的持续照射下,路基表面温度逐渐升高,冻胀逐步缓解,从数据中可以看出路基冻胀每天变化的最大值约2 mm;随着时间的推移,温度逐渐降低,路基重新出现冻胀情况。从图13还可以发现,哈齐客运专线路基冻胀测量点冻胀值在3月25日发生了明显的整体偏移。肇东在2015年3月24日的气温为-2~7 ℃,2015年3月25日气温为2~13 ℃,这是肇东市2015年2月以来最低气温首次在0 ℃以上,并持续了几天。可以发现,正是气温的上升导致了路基冻胀的整体偏移。
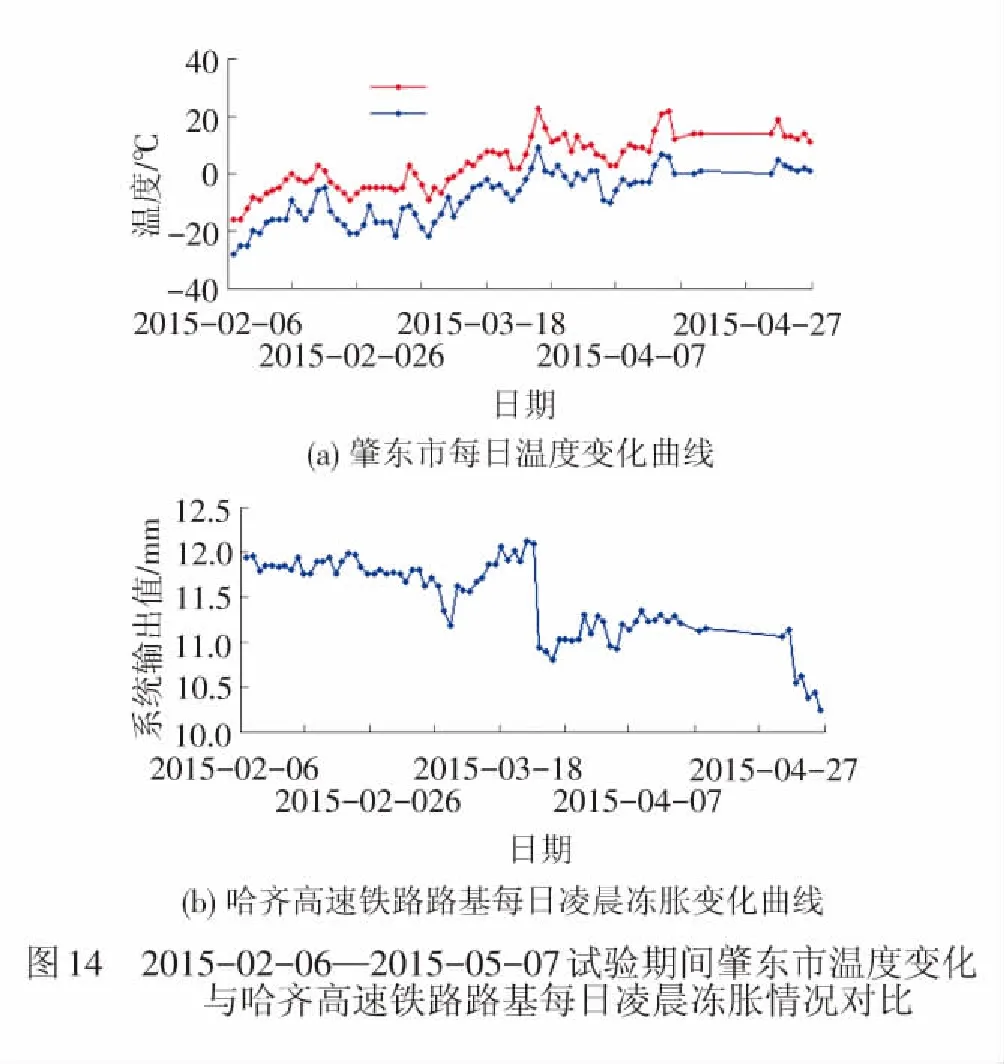
为了判断哈齐高速铁路路基测量点是否真的存在冻胀情况,排除环境光的干扰,本文选取测量期间每日凌晨的冻胀数据分析测量点路基的整体变化情况。哈齐高速铁路路基测量点每日凌晨冻胀数据与试验期间肇东市每日温度对比,见图14。通过处理分析每日凌晨路基冻胀数据,对比肇东市每日温度变化,路基冻胀确实在2015年3月24日到2015年3月25日发生较大变化,由于环境温度的整体升高测量点路基发生约1.2 mm的沉降。在哈齐高速铁路为期3个月的路基冻胀监测中,对比试验前期与后期每日凌晨0:00路基冻胀数据可以发现,哈齐高速铁路系统测量点铁路路基冻胀量最大值约为2 mm。
5 结论
本文提出一种基于PSD的高速铁路路基冻胀远程监测系统,具有安装方便、测量精度高、制作成本低、可以实现无损监测等优点,实现了对路基冻胀的实时远程监测。针对现场监测条件特点,提出了背景光补偿方法,通过试验验证了该算法的实用性与准确性。通过温度试验得到温度变化对系统输出造成的影响。试验表明系统的测量精度可达到0.2 mm以内,能够在严寒恶劣环境下正常稳定工作。对现场试验数据的分析表明,哈齐高速铁路测量点路基确实存在冻胀情况。由此可见,该系统能够作为一种可靠的高速铁路路基冻胀监测方法,为监测路基冻胀情况及数据分析、路基修复等提供支持。
猜你喜欢
都市(2023年6期)2023-12-28 07:56:54
诗歌月刊(2023年1期)2023-03-22 14:06:24
天水行政学院学报(2022年4期)2022-11-18 09:02:36
高速铁路技术(2022年2期)2022-05-05 01:18:16
高速铁路技术(2022年1期)2022-03-17 07:45:06
少儿美术(快乐历史地理)(2020年4期)2020-02-24 13:06:28
阅读(高年级)(2019年9期)2019-11-15 07:22:54
阅读与作文(小学高年级版)(2019年8期)2019-10-16 04:46:50
学苑创造·A版(2019年4期)2019-05-10 00:19:52
铁道通信信号(2016年2期)2016-06-01 12:10:18