基于北斗短报文的震源船跟踪系统设计与实现
2019-02-21 09:36:08王青平林岩钊张树君
应用海洋学学报 2019年1期
王青平,肖 健,郑 超,林岩钊,郑 韵,张树君
(福建省地震局 ,福建 福州 350003)
福建省地处我国东南沿海地震带北段,历史上曾多次遭受7级以上地震的破坏,探明福建及其邻近海域地壳上地幔结构和滨海断裂带的构造信息,绘制跨越台湾海峡的三维地壳结构图,对进一步提升闽台地区地震构造活动的认识水平、拓展对地震灾害风险的控制能力具有重大意义[1-2].为进一步查明滨海断裂带的位置、产状和深部构造信息,福建省地震局从2013年开始实施“福建及台湾海峡地壳深部构造陆海联测”计划,陆域使用移动式气枪震源系统,海域使用延平2号震源船的船载式气枪震源系统,陆海均布设观测系统的方式进行联合观测[3-4].
为确保海上工作顺利开展,并加强总指挥部对震源船实时位置、航速等信息的监控.在2013—2014年的陆海联测实验中,研发了1套“运动轨迹远程动态显示系统软件”[5],利用海事卫星数据链路,陆海联测指挥部定期扫描震源船导航系统生成的导航文件,解析气枪激发的位置,并将激发位置显示在地图上.在气枪上线激发过程中,该系统可以很好地跟踪震源船的位置等信息.为解决气枪未激发时的震源船跟踪,2015年研发了另一套“基于海事卫星的船舶本地和/或远程航迹跟踪软件”[6],在震源船上部署一个Trimble Net系列GPS接收机,利用接收机提供的动态网页编程技术,指挥部通过海事卫星数据链路实时获取震源船位置,并在后续的陆海联测实验中得到应用,获得良好的效果.上述2套系统都是建立在海事卫星数据链路的基础上,其费用较高且存在数据安全隐患[7].
近年来,随着事业的发展,指挥部对震源船实时航行方向和实时速度方向等信息的需求也日益迫切.亟需1套经济实惠、安全可靠,可实时获取震源船位置、航行方向以及航行速度等信息的定位跟踪系统.
1 技术与方法
1.1 北斗短报文
由我国自主建设、独立运行的北斗卫星导航系统(Beidou navigation satellite system,BDS)是继美国GPS和俄罗斯GLONASS之后第三个成熟的卫星导航系统[8].与美国GPS和俄罗斯GLONASS等系统相比,北斗系统除了能够提供其他系统所具备定位、导航、授时服务外,并具有位置报告和短报文通信能力[9-10].
北斗短报文是北斗系统的独特功能,在没有移动通讯信号的情况下,利用卫星进行双向通信,既可以让别人知道自己位置,也可以主动发信息告知别人自己的位置.利用北斗卫星系统全天候、全天时的短报文收发功能将震源船的多个控制点的位置传给远程监控平台,为指挥部监控震源船是否按计划作业以及方案调整和指令下达等提供可靠的第一手资料.
1.2 控制点位置信息
为了更好地对震源船的航向实时监控,分别在船头、船尾以及拖曳的枪阵中心3个控制点各部署1套Trimble Net R9接收机,通过跟踪控制点的实时位置,确定震源船的位置、航行速度以及航行方向等.该接收机不仅提供NMEA-0183协议输出GGA、RMC等信息,还可利用浏览器调用编程接口(programmatic interface)进行参数读取和设置[11].图1为通过网页调用编程接口显示的信息,其中包括GPS周数(GPS Week Number)、GPS周内秒(GPS Seconds of Week)、经纬度、高程等信息.通过格式化输入,可获得3个控制点的时间、位置等信息.
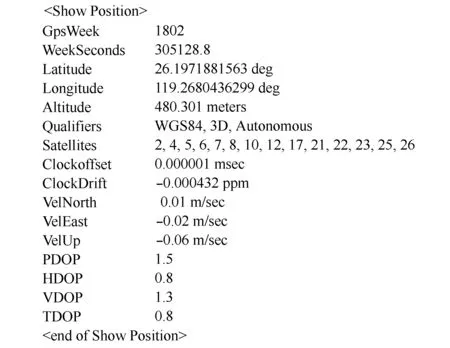
图1 Trimble Net R9接收机编程接口返回的数据Fig.1 Data from the programmatic interface of Trimble Net R9
1.3 数据压缩
北斗卫星通信系统对发送的短报文长度和时间间隔都有严格的要求,一般用户一次可以传输36个汉字(72个字节),且每次发送需间隔15、30s或60s[12].
考虑到GPS水平向和垂直向的定位精度以及监控平台精度设计需求,控制点的经纬度至少应保留到小数点后5位,高程保留到小数点后1位.经纬度有效数位达到8位,需采用双精度浮点数,而高程可采用单精度保存,单个控制点的经纬度和高程至少需要20字节.3个控制点信息加上整型的GPS周数和双精度的GPS周内秒,高达72字节,达到北斗短报文的临界长度,同时还需加入标识符用于判断3个GPS时间的同步性,因此必须对多个控制点信息进行压缩.
以船头为参考点,船头经纬度使用绝对值,考虑到船头与船尾和拖曳的枪阵中心点的距离不超过200m,船尾和枪阵中心点使用相对值.为增加信息可读性,使用ASCII码进行存储.压缩后的总长度为60字节,分为11个字段,表1给出各字段说明.
2 结果与讨论
2.1 系统设计
为适应新时代指挥部远程监控平台对震源船的定位跟踪信息化、可视化与自动化的要求,以提升远程监控平台对震源船的监控和管理水平为目标,设计的方案应遵循实用性、易用性和开放性等原则.
2.1.1系统功能 基于北斗短报文的震源船跟踪系统以历年陆海联测遇到的实际问题为导向,设计的系统应具有以下功能:
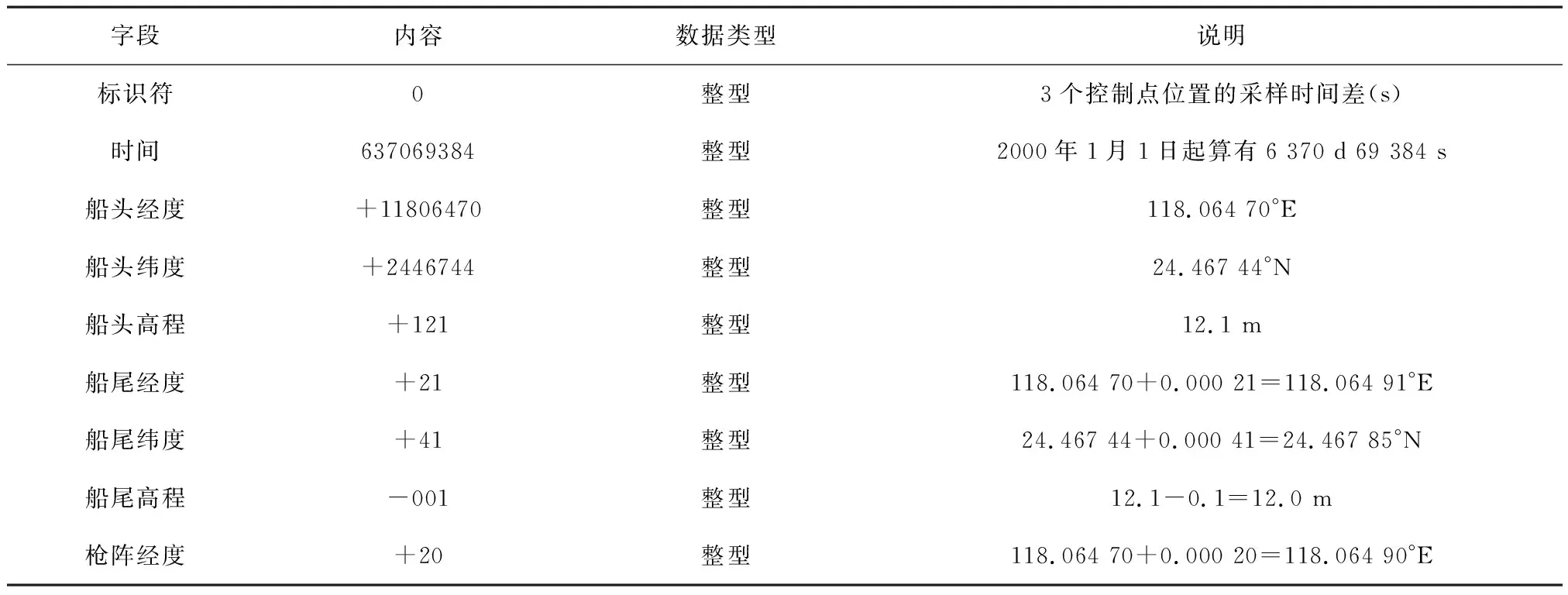
表1 压缩的北斗短报文信息Tab.1 Compressed Beidou short message

续表1
注:表格中北斗短报文信息以“0 637069384+11806470 +2446744 +121 +21 +41-001 +20 +39 +020”为例
①震源船上部署的服务端可以实时获取3个控制点的位置等信息,并通过北斗短报文向远程监控平台推送控制点信息,还可显示震源船实时位置、航速和航向等信息;
②指挥部中部署的客户端可接收服务端推送的北斗短报文获得控制点信息,显示震源船实时位置、航速和航向,对震源船是否按事先设定的航线、航速和航向作业进行监控;
2.1.2 系统架构 根据实际应用的需求,结合系统的功能,设计了相应的系统架构如图2所示.
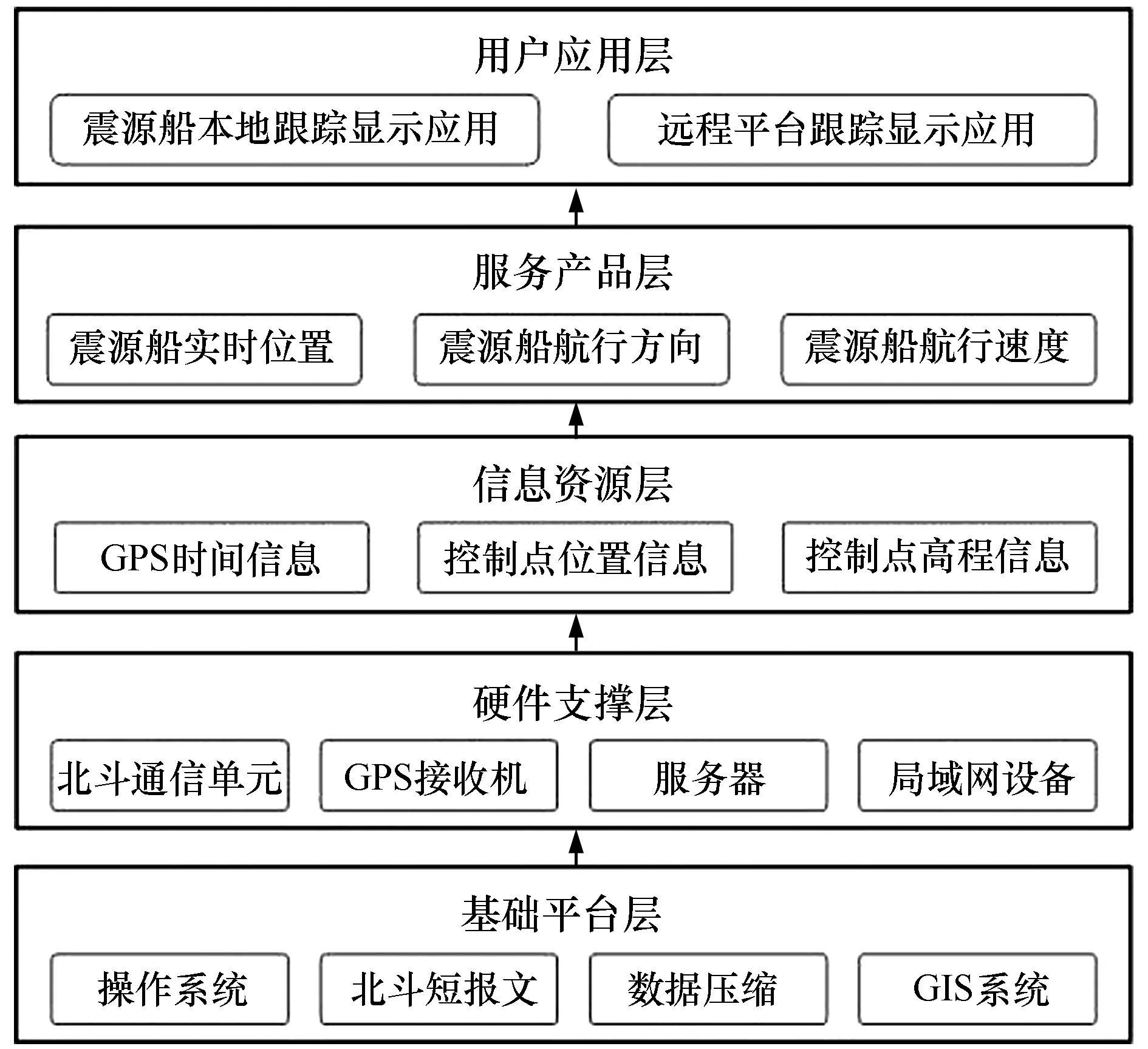
图2 基于北斗短报文的震源船跟踪系统架构Fig.2 Outline of multi-point tracking system based on Beidou short message
系统架构设计分为基础平台层、硬件支撑层、信息资源层、服务产品层和用户应用层5个基础层级.其中基础平台层包含操作系统、北斗短报文、数据压缩及GIS系统的建设,为整体应用系统的全面建设提供良好的基础;硬件支撑层包括1套北斗通信单元、3套GPS接收机以及服务器等设备,是系统的核心部分;信息资源层是项目的数据资源的保障,主要包括GPS时间信息以及控制点的位置和高程信息;服务产品层是系统的主要产出,主要包括震源船实时位置、航行方向以及航行速度等;用户应用层是系统产品的应用,提供震源船本地和远程监控平台的跟踪显示.
2.1.3 设备连接 图3为基于北斗短报文的震源船跟踪系统的设备连接示意图.
部署在船头、船尾和枪阵中心的GPS天线分别通过馈线接入各自GPS接收机;震源船服务器一方面通过网络调用编程接口读取位置信息,另一方面通过串口与北斗通信单元进行信息推送.指挥部服务器通过串口接收北斗信息.
2.1.4 功能模块 基于北斗短报文的震源船跟踪系统由数据汇集、数据存储、信息压缩、短报文封装、短报文推送、短报文接收、短报文解析、信息解压和跟踪显示9个模块组成,图4为系统的功能图.
2.2 系统实现及应用
基于北斗短报文的震源船跟踪系统开发环境采用Windows 7操作系统+MATLAB R2011b,提供了高级开发和调试功能,同时还可对存储的震源船位置信息进行后续的数据分析和挖掘.
在2017年的陆海联测实验中,北斗通信终端使用福建星海通信科技有限公司的北斗船载终端XH/BDI-CY02D,其中震源船和指挥部的北斗终端号码分别为145131和198238,支持北斗4.0协议,短报文发送频度为1 min,串口通讯的波特率为14 400字节/s,8个数据位,1个停止位,无校验.
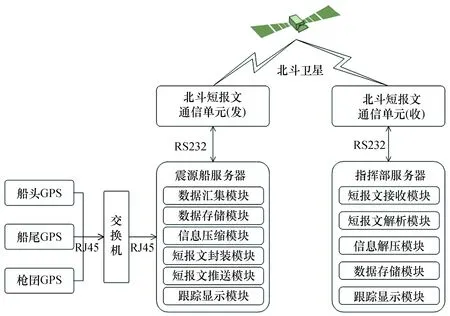
图3 设备连接示意Fig.3 Diagram of device connection
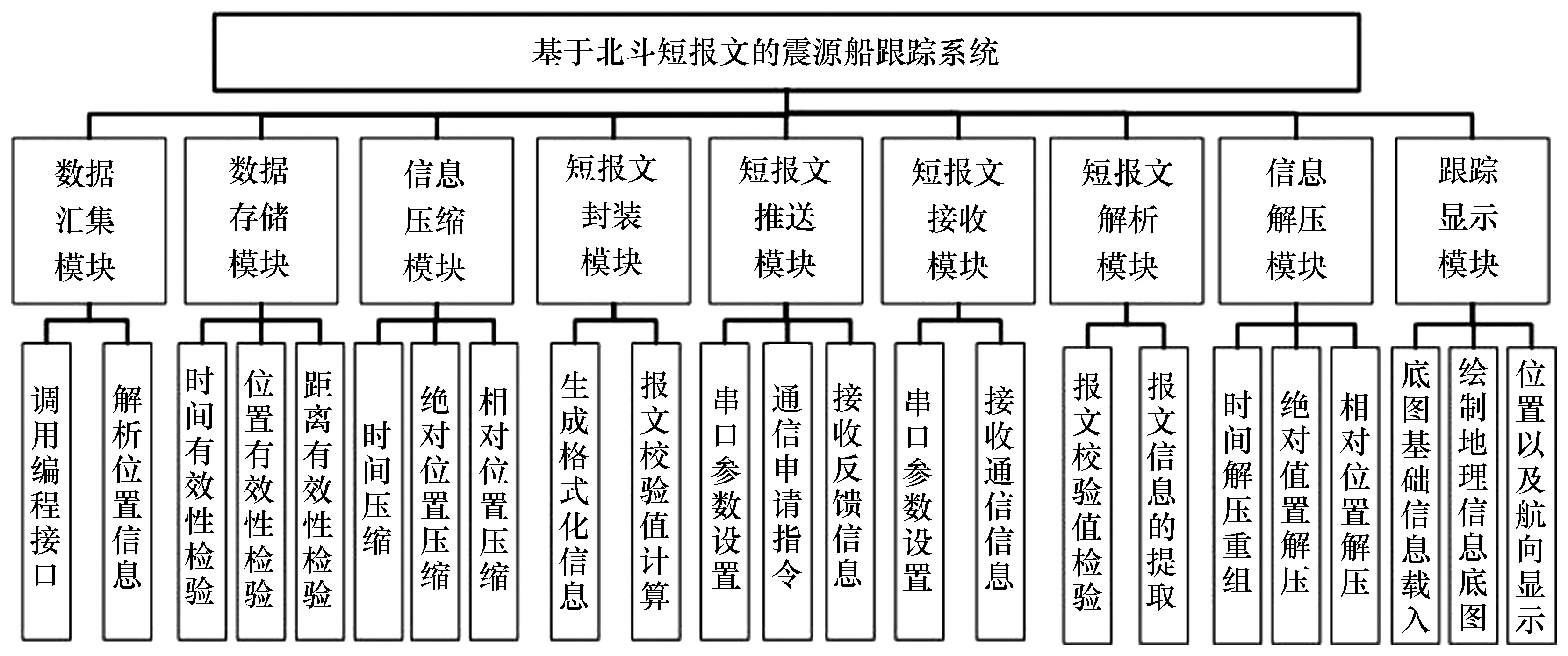
图4 系统功能图Fig.4 System function diagram
图5是截取的震源船推送的北斗短报文信息,每行是1条短报文,记录着时间和3个控制点的位置信息.
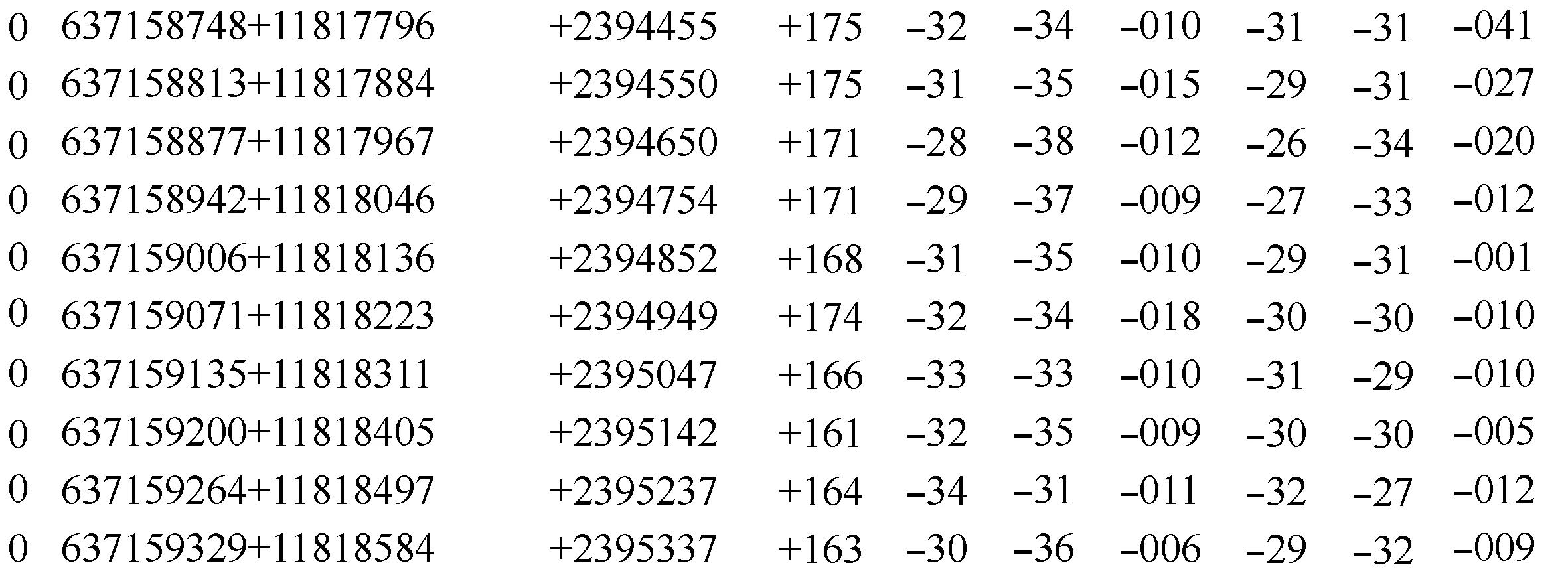
图5 截取的震源船推送北斗短报文信息Fig.5 Interception of Beidou short message information
图6是陆海联测指挥部根据接收的北斗短报文解析得到时间和震源船3个GPS点位的位置信息.
在2017年陆海联测期间,震源船共发出15 244条短报文,指挥部收到14 714条短报文,数据丢失率约为3.5%.遗失的530条主要由于实验期间指挥部设备搬迁、接收模块进行升级以及震源船靠港避风期间震源船和指挥部开机时间不协调造成的.
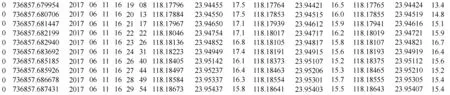
图6 指挥部解析相应的震源船位置信息Fig.6 Parses of the corresponding ship location information by the commander
根据解析的震源船位置信息,可以计算出震源船的位置、航向和航行速度等信息,如图7所示,台湾海峡中,已经连成线的黑点是震源船的轨迹点,显然震源船从漳浦外海南端向东北进行作业,黑色三角形为船当前位置,当前航速为8.7 km/h,航向为北偏东42.4°.一旦收到新的数据,就实时更新震源船的位置,达到实时跟踪的功能.

图7 基于北斗短报文的震源船跟踪系统运行示意Fig.7 Diagram of the tracking system based on Beidou short message 当前航速为8.7 km/h,航向为北偏东42.4°
研发的基于北斗短报文的震源船跟踪系统在2017年的陆海联测实验中得到应用和检验,陆海联测指挥部可以实时查看震源船是否按事先设定的测线、事先设定的速度和航向进行作业,有效保障了监控平台对震源船的监控,提升安全生产的风险控制能力.
3 结语
新时代,面对陆海联测指挥部对震源船的监控提出了新要求,研发了基于北斗短报文的震源船跟踪系统.系统由数据汇集、数据存储、信息压缩、短报文封装、短报文推送、短报文接收、短报文解析、信息解压和跟踪显示9个模块组成.由于使用我国自主知识产权的北斗短报文进行通讯,大大提高了系统的安全性、可靠性和稳定性.
通过在震源船安装部署多套GPS接收机,实时获取震源船的位置,经过信息压缩后利用北斗短报文推送到陆海联测指挥部,实现监控平台对震源船的监控.可有效判断震源船是否按事先设定的测线、事先设定的速度和航向进行作业,便于指挥部对实验方案进行调整,有效保障了监控平台对震源船的监控,进一步提升安全生产的风险控制能力.同时根据3个点位信息计算的实时震源船航向,有助于准确把握震源船在进行固定点悬停激发时的航向,克服了以往使用前后两个时刻推算的平均航向代替实时航向等问题.
猜你喜欢
东方剑·消防救援(2024年2期)2024-03-18 09:03:38
世纪风采(2021年10期)2021-10-21 05:16:18
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
黑龙江省人民政府公报(2020年3期)2020-07-28 07:56:00
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
水文地质工程地质(2017年3期)2017-06-21 15:10:27
电子制作(2017年24期)2017-02-02 07:14:16
中国老区建设(2016年5期)2016-02-28 09:32:53
大江南北(2015年11期)2015-12-01 10:32:52
法大研究生(2015年2期)2015-02-27 10:13:55