基于功率控制的雷达低截获概率探测技术
2019-02-18 02:46:22王亚涛张保群曾小东
无线电工程 2019年3期
王亚涛,张保群,曾小东
(中国西南电子技术研究所,四川 成都 610036)
0 引言
在先敌发现、先敌攻击和先敌摧毁的作战理念下[1-3],机载雷达作为大功率有源辐射源,很容易被敌方截获,进而发起干扰和攻击,使战机的生存受到严重威胁。因此,参照卫星采用功率控制[4-6],雷达需要采取相应的低截获概率(LPI)措施[7-8]。雷达实现LPI的重要途径之一是功率控制,通过降低天线的峰值辐射功率,在保证有源探测距离的前提下,降低被侦察设备截获的距离,从而实现LPI探测[9-11]。文献[12-14]研究了目标跟踪时雷达的自适应跟踪功率分配算法,但没有考虑雷达的初始搜索功率。文献[15]研究了功率分级的实现原理,利用改进的粒子群多目标优化算法对阵元的开关进行了优化设计,然而算法并未考虑对手侦察设备的能力。本文针对对手侦察设备的灵敏度以及目标平台RCS水平,研究了雷达的LPI探测技术,可以实现在搜索和跟踪状态下对敌方平台的隐蔽探测。
1 LPI探测原理
1.1 雷达作用距离
不失一般性,考虑有大气衰减的情况,雷达方程[16]为:
(1)
式中,Pt为雷达发射功率(W);Gt为雷达探测时发射增益;Gr为雷达探测时接收增益;λ为雷达信号波长(m);σ为敌方侦察设备平台的雷达截面积(m2);δ为大气衰减因子(dB/m);R为我机雷达与敌方侦察设备平台的距离(m);Pr,R为雷达接收功率(W)。
令式(1)中接收功率Pr,R=Prmin,R,求解如下非线性方程得到雷达作用距离RD,
(2)
式中,Prmin,R为雷达接收机灵敏度(W)。
1.2 侦察设备对雷达的截获距离
侦察设备截获雷达信号时,侦察设备接收到的信号功率为:
(3)
式中,Gr,E为侦察设备接收天线增益。
令式(3)中Pr,E/Gr,E=SE,求解如下非线性方程得到侦察设备对雷达的截获距离RI,
(4)
式中,SE为侦察设备系统灵敏度(W)。
1.3 临界功率和LPI探测距离
在雷达与侦察设备平台的某一相对距离R处,雷达探测到侦察设备平台所需的最小发射功率等于侦察设备平台截获雷达主瓣所需的最小发射功率,对应的最小发射功率称为临界功率。对应的距离R称为临界距离,即雷达LPI探测距离。在雷达LPI探测距离以内,雷达可以发现目标,但不被侦察设备平台截获。
当敌我双方距离R固定时,令侦察设备对雷达的截获距离式(3)中Pr,E/Gr,E取最小值SE,则侦察设备为实现对雷达的截获,所需的雷达最小发射功率为:
(5)
同时,当敌我双方距离R固定时,令雷达方程式(1)中Pr,R/Gr取最小值SR,则满足雷达探测所需的最小发射功率可记为:
(6)
式中,SR为雷达系统灵敏度(W)。
根据式(5)和式(6),定义截获因子为:
(7)
在雷达采用自适应功率控制的前提条件下,截获因子的取值不同,表示不同的含义:当α<1时,在当前敌我双方相对距离条件下,侦察设备无法截获雷达主瓣信号;当α≥1时,在当前敌我双方相对距离条件下,侦察设备能截获雷达主瓣信号。
令式(7)中α=1,求解如下非线性方程得到的R0称为雷达LPI探测距离。
(8)
在临界距离上,雷达探测与侦察设备截获所需的最小功率是相同的,该功率称为临界功率。
下面给出临界功率的计算公式。首先,由式(8)可以得到:
(9)
进一步根据式(5)可得临界功率为:
(10)
或者根据式(6)可得临界功率为:
(11)
由式(10)和式(11)可以看到,临界功率不包含大气衰减因子和临界距离等量。因此,在RCS、雷达发射增益、雷达和侦察设备灵敏度不变的前提下,有无大气衰减会影响临界距离,但大气衰减因子、临界距离对临界功率无影响。临界功率和LPI探测距离如图1所示。
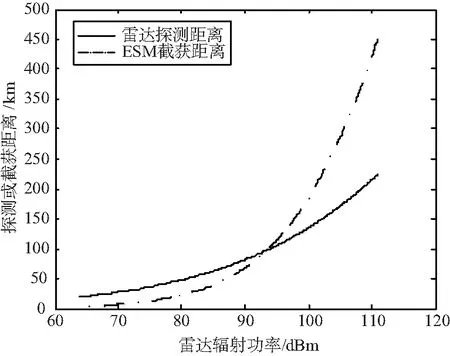
图1 临界功率和LPI探测距离
1.4 LPI探测在隐身作战时的效能分析
通过上述临界功率和LPI探测距离的推导,可以得到雷达在搜索和跟踪2个过程中能够到达的隐身作战效能。
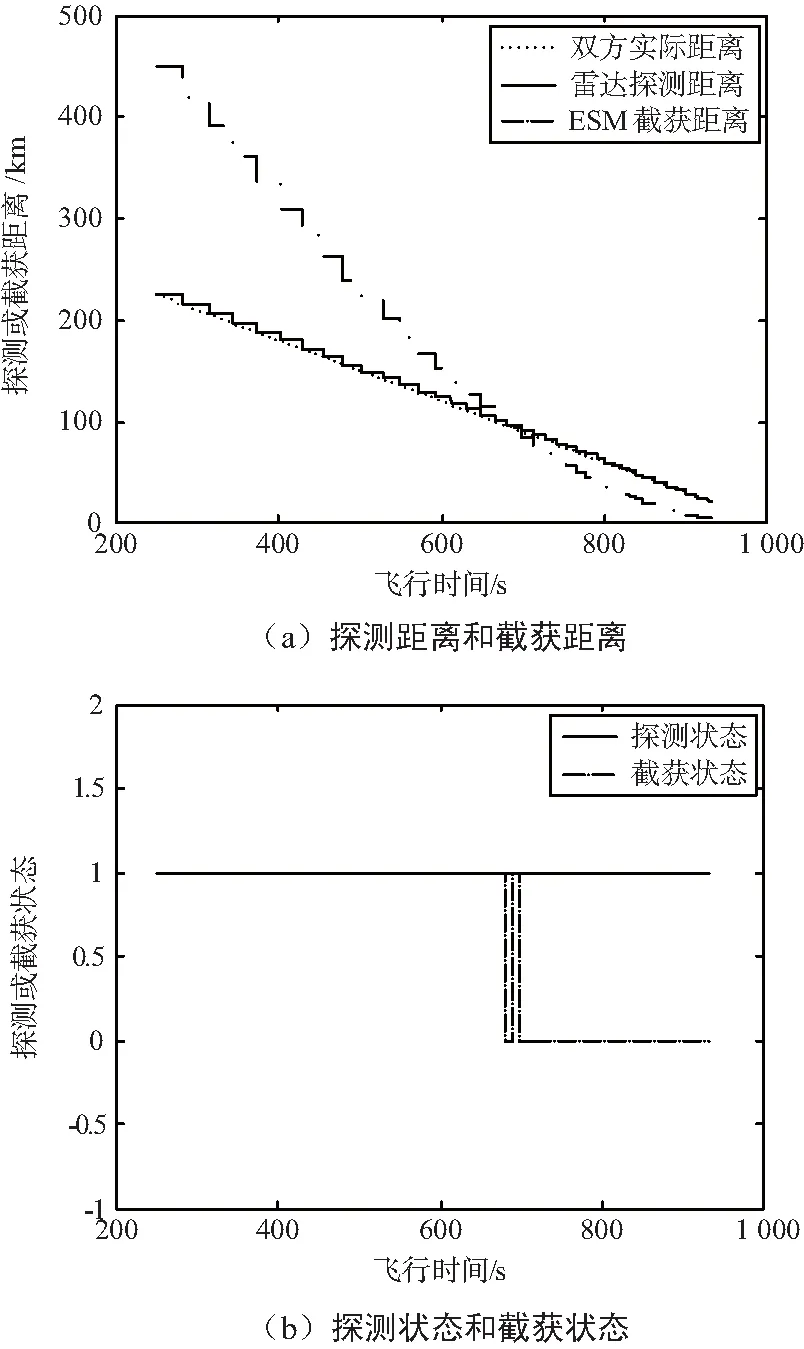
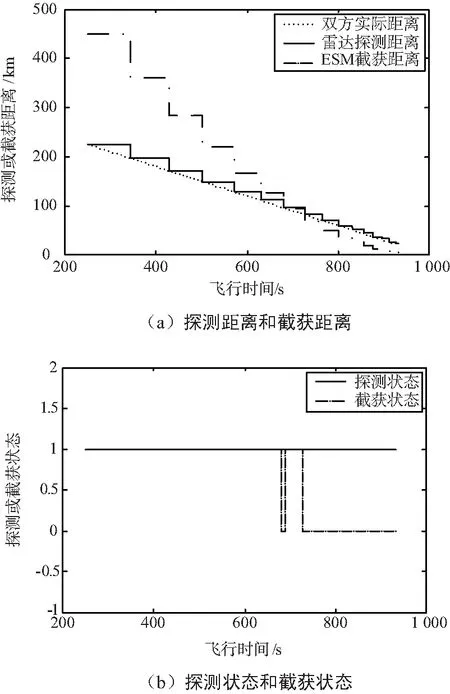
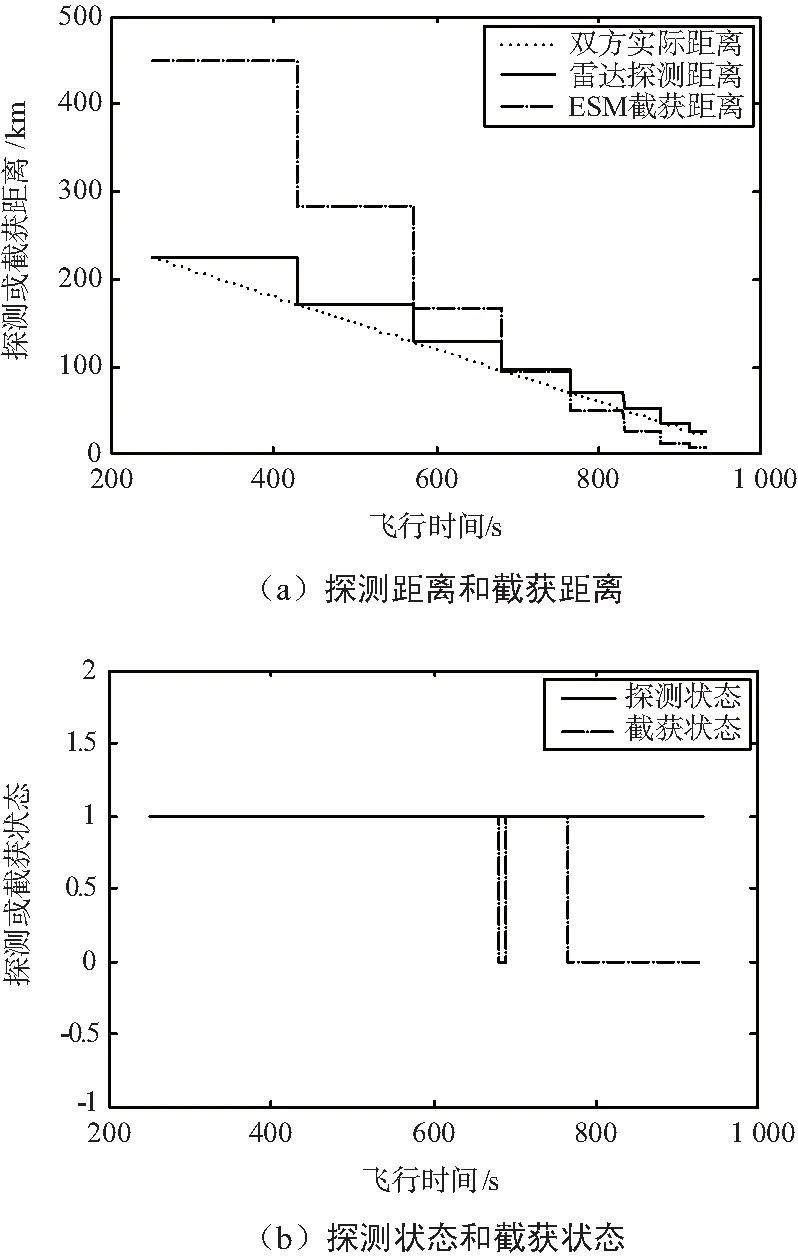
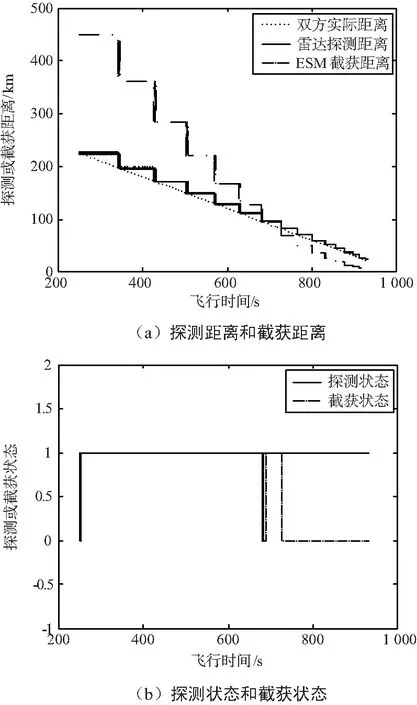
搜索时,雷达根据对抗目标的RCS和侦察设备灵敏度等先验知识,将搜索的初始功率设为临界功率[17]。跟踪时根据目标回波信号大小进行自动功率控制[18]。采用搜索时初始功率控制以及跟踪时自动功率控制联合的方式,将达到如下隐身作战的效能:当R>R0,侦察设备不能截获雷达,雷达也不能探测侦察设备,双方处于均势;R 表1 隐身作战效能 功率控制方式距离段R>RDR0 从表1可以看出,只有同时进行搜索和跟踪功率控制,才能真正实现隐身作战。 通过仿真验证雷达LPI探测算法的有效性。仿真场景为在东北天坐标系下雷达载机与侦察设备飞机沿东向相向飞行,飞行速度均为150 m/s,飞行高度10 km。初始距离为300 km,退出距离20 km。在侦察设备飞机进入雷达作用距离内时,雷达开机,并进行等级功率控制。仿真采样间隔与功率控制时间间隔均为50 ms,考虑大气衰减的影响。 不同功率控制步进下的探测距离和探测状态,以及被侦察设备截获距离和截获状态的仿真结果如图2、图3和图4所示。 图2 功率控制步进1 dB 图3 功率控制步进3 dB 图4 功率控制步进6 dB 从图2、图3和图4可以看出,等级功率控制下,由于控制余量的产生使得侦察设备对雷达的截获状态有起伏,但仅有一次起伏。功率控制步进影响再次截获到雷达的时间长度,步进越大,则再次截获雷达的时间长度越长。随着功率控制步长的减小,震荡时间段在减小。 不同RCS抖动量下的探测距离和探测状态,以及被侦察设备截获距离和截获状态的仿真结果如图5和图6所示。 从图5和图6以看出,RCS抖动使得初始时间段内的个别时刻雷达探测所需的功率大于最大发射功率,因此探测状态也在初始时间段内呈现高频起伏。RCS抖动,会使得侦察设备对雷达的截获状态有高频起伏。RCS抖动量较小时,各高频起伏时间段之间的间隔大小主要由功率控制步进决定。RCS抖动量越大,高频起伏越明显,各高频起伏时间段之间的间隔越小。 图5 RCS抖动0.1 dB 为解决雷达探测时全功率辐射容易被敌方侦察设备截获的问题,本文研究了雷达的LPI探测技术,随着飞行时间的累积,敌我双方的距离减小,功率控制量增加,雷达可达到能够发现目标而侦察设备不能截获雷达信号的LPI探测效果。通过仿真验证了功率控制步进和目标RCS抖动对雷达LPI探测性能的影响,分析结果与实际试验情况一致。后续将进一步研究在复杂电磁环境下,雷达采用不同波形时的LPI探测效果。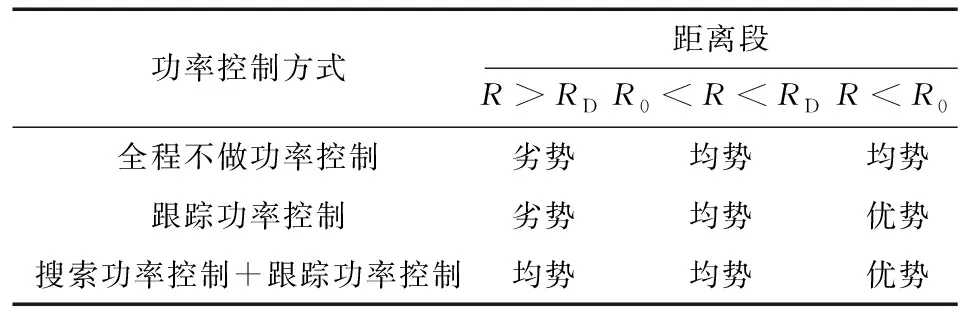
2 仿真分析
2.1 功率控制步进对LPI探测的影响
2.2 RCS抖动对LPI探测的影响
3 结束语
猜你喜欢
现代雷达(2023年11期)2024-01-05 15:01:52延边大学学报(社会科学版)(2020年2期)2020-03-25 13:28:26英语文摘(2020年11期)2020-02-06 08:53:16成都信息工程大学学报(2018年5期)2018-12-06 09:23:52测控技术(2018年3期)2018-11-25 09:45:52现代交际(2018年6期)2018-05-17 06:33:12无线互联科技(2017年24期)2018-01-22 10:39:24中国管理信息化(2017年18期)2018-01-04 18:41:52北京航空航天大学学报(2017年12期)2017-04-23 08:31:51物联网技术(2017年2期)2017-03-15 17:18:11