多平台主动与被动传感器协同跟踪的长时调度方法
2019-02-15 05:44:56乔成林单甘霖段修生郭峰
兵工学报 2019年1期
乔成林, 单甘霖, 段修生,2, 郭峰
(1.陆军工程大学石家庄校区 电子与光学工程系, 河北 石家庄 050003; 2.石家庄铁道大学 机械工程学院, 河北 石家庄 050043;3.北京航天飞行控制中心, 北京 100094)
0 引言
网络化战争中,战场中分布大量多种型号的传感器,如何管理这些传感器资源以满足作战任务需求,具有重要的意义。目前,以主动、被动传感器协同跟踪为代表的调度方法正逐渐受到学者的重视,通过合理地调度主动、被动传感器可以满足任务需求、降低系统辐射。文献[1]研究了单平台主动、被动传感器辐射控制方法,当满足精度需求时调度被动传感器,否则调度主动传感器。考虑杂波环境,文献[2]提出一种机载雷达辅助无源传感器的机动目标跟踪方法。进一步,吴巍等[3]研究了多平台主动、被动传感器调度方法,并提出一种时间- 空间辐射控制方法,即时间上优先选择被动传感器,若不能满足任务需求,则在空间上选择威胁度最小的主动传感器,从而降低系统辐射。实际上,不同主动传感器的使用代价是不同的,文献[4]通过量化主动传感器辐射代价,构建跟踪任务需求下传感器调度模型,实现了对目标的协同跟踪。然而,由于未考虑切换代价,系统容易产生频繁切换,不利于实际应用。
此外,依据决策步长,传感器调度方法可分为短时调度和长时调度。短时调度以当前单步收益为决策准则,因此文献[1-4]的调度方法均可认为是短时调度。相对于短时调度方法,长时调度以未来一段时域内的收益为决策准则,其性能往往更优越。文献[5]研究了多被动传感器长时任务规划问题,采用基于蒙特卡洛Rollout采样的Q值估计方法实现对目标的协同跟踪。文献[6]将空间态势感知中多传感器长时调度问题转化为多Agent马尔可夫决策过程,给出基于随机仿真的随机优化技术,实现了对多个动态目标的协同监测。文献[7]针对声纳传感器长时调度问题,提出一种连续概率状态算法,实现了对多个水下目标的持续跟踪。然而,长时调度方法的计算量随决策步长增加呈指数爆炸增长[8],如何降低搜索空间、提高算法实时性显得尤为重要。
针对上述问题,本文提出一种多平台主动与被动传感器协同跟踪的长时调度方法。首先,构建基于部分可观马尔可夫决策过程(POMDP)的长时调度模型;然后,考虑跟踪任务需求,引入传感器辐射代价和切换代价,建立长时目标优化函数;最后,提出改进的维特比算法(VA),求解最优调度序列。仿真结果验证了所提搜索算法和调度方法的有效性。
1 多平台主动与被动传感器调度模型
在多平台主被动传感器系统中,一方面主动传感器通过向外辐射电磁波获得目标位置信息,但其辐射代价较高;另一方面被动传感器无需辐射电磁波就能获知目标的角度信息,但信息的缺维会导致跟踪精度发散。为此,考虑跟踪任务需求和主被动传感器特性,依据POMDP理论[9],建立基于POMDP的传感器长时调度模型,以满足跟踪任务需求、降低系统辐射代价。
1.1 平台调度动作及传感器调度动作

(1)
1.2 状态空间及状态转移律
系统状态空间Sk由目标运动状态Xk、平台调度动作ak、传感器调度动作gk及目标运动模型mk组成,则k时刻:
(2)
目标状态按照其状态转移律转移到下一时刻,即
Xk+1=f(Xk,mk,vk),
(3)
式中:vk为零均值高斯过程噪声,其协方差矩阵为Qmk.
进一步,机动目标状态转移律可由目标运动模型mk获得,则其对应的状态转移律可表示为Fmk.
1.3 观测空间及观测律
目标观测律取决于传感器观测模型,即
(4)
式中:wk为零均值高斯观测噪声;rk+1表示k+1时刻平台与目标的距离;Th为相应传感器的作用范围,当目标处于传感器作用范围内时,传感器能获得目标量测信息,否则不能。
若调度平台上主动传感器(如雷达),则
Zk+1=h(Xk+1,ak,gk,wk)=[rk+1,θk+1,φk+1]Τ+wk,
(5)
式中:θk+1和φk+1分别表示方位角和俯仰角。
相似地,若调度平台上被动传感器(如红外传感器),则
Zk+1=h(Xk+1,ak,gk,wk)=[θk+1,φk+1]Τ+wk.
(6)
1.4 信念状态
考虑到目标跟踪系统中,状态不能被完全观测,引入目标信念状态bk,以实现对目标运动状态的持续更新[5],则定义信念状态为
bk=p(Xk|X0,p0,Z1,…,Zk,a0,…,ak-1,g0,…,gk-1),
(7)
式中:X0和p0为目标初始状态及其分布概率。
1.5 目标优化函数
不同的应用场景,性能衡量指标往往不同。为此,结合战场应用实际,本文引入3种性能指标,即目标跟踪精度、传感器辐射代价和切换代价,分别表征系统的目标跟踪性能、生存性能和稳定性能:
1)目标跟踪性能ρ(bk,ak,gk)。为了满足跟踪任务需求,需要协同调度各平台各类型传感器。对于杂波条件下的机动目标,由于当前时刻不能准确地获知未来时刻的量测,较难准确地获知其跟踪精度。为此,引入后验克拉美- 罗下界(PCRLB)指标,以表征其跟踪性能。
2)传感器辐射代价E(ak,gk)。考虑到主被动传感器辐射电磁波的差异性,主动传感器的辐射代价要大于被动传感器。结合文献[10],可假设被动传感器的辐射代价为0,此外,由文献[11]可知,不同主动传感器的辐射代价也不同。
3)切换代价γ(ak-1,ak,gk-1,gk)。在传感器调度中,为了获得最优调度性能,系统常面临频繁切换问题,从而极大影响了系统稳定性和可操作性。为此,结合实际,引入切换代价[12]。显然,不同平台间的切换代价要远大于同一平台内传感器的切换代价,下文分别简称为平台切换代价和传感器切换代价。
因此,定义短时代价函数为

(8)
式中:α表示平衡系数;en、cp和cs分别表示传感器辐射代价、平台切换代价和传感器切换代价;δ(x,y)为指示函数,x=y时取值为0,否则为1.
相比于短时代价函数,长时代价函数能进一步提高系统性能。考虑跟踪精度需求,构建长时代价函数的目标优化函数,即
(9)
式中:Ak:k+H-1={ak,gk,…,ak+H-1,gk+H-1},H为决策时长;ρd为任务需求对应的精度阈值。
传感器长时调度包含两种模式:开环调度和开环反馈调度,本文调度属于后者,其调度流程如图1所示。任意k时刻,调度中心根据目标优化函数获得最优调度序列Ak:k+H-1,而后选择第1个调度动作(ak,gk)实现目标信念状态的更新。由于加入反馈环节,开环反馈调度的性能要优于开环调度,但其计算量也更高。
2 问题求解
2.1基于交互式多模型概率数据关联算法的信念状态更新
为有效估计杂波环境下机动目标状态、更新其信念状态,引入交互式多模型概率数据关联(IMMPDA)算法[13],其执行步骤如下:
1)相互作用。依据先验信息,计算混合概率:
(10)

进一步,计算模型j的混合初始状态及其协方差矩阵:
(11)
2)滤波。
(12)
式中:ZXk+1表示实际观测值;l为最大有效区域对应的模型;ε为波门参数;|·|为求行列式。
若ZXk+1满足(12)式,则将其作为候选回波;否则舍弃该观测。
③ 估计模型j状态。假设共有nk+1个候选回波,则
(13)
(14)

3) 更新模型概率。似然函数是nk+1个新息的联合概率密度函数,即
(15)
式中:PD表示检测概率;PG表示门概率;nz为观测向量的维数;cnz为相应超球面体积。
进一步,更新模型概率,即
(16)
式中:πj为列向量;μk和c分别为模型概率和归一化因子。
4) 目标信念状态更新。估计目标状态及其协方差矩阵
k+1)k+1)T],
(17)
更新k+1时刻目标信念状态,即
bk+1~N(Xk+1;
(18)
2.2 机动目标长时精度预测
考虑到当前时刻无法获知未来时刻目标的量测信息,结合PCRLB理论,依据当前先验信息,计算目标的状态估计下界,并以此作为目标的预测精度,从而合理地调度传感器以满足跟踪精度需求。
根据PCRLB理论,则存在
E(
(19)
式中:Jk为Fisher信息矩阵。
进一步,目标状态转移先验概率密度函数为
(20)
式中:mk+1表示k+1时刻目标的运动模型。
Fisher信息矩阵递推公式为
(21)
显然,在k时刻无法获知目标的运动模型。为此,依据k时刻的模型概率,以当前最大概率对应的模型作为目标预测模型[15],则
(22)
因此,机动目标跟踪精度预测流程为
1) 根据k时刻信念状态bk,获得目标状态估计k、协方差Pk及模型概率μk.

3)计算p(Xk+h|Xk)。再依据(21)式计算k+h时刻Fisher信息矩阵Jk+h.
2.3 改进VA
考虑(9)式的优化模型,其共有(2N)H种传感器组合。当N和H较大时,其计算量将是巨大的,难以满足实时性要求。动态规划具有广泛的应用范围,尤其适用于节点状态及路径代价已知的优化问题。然而,本文优化模型中各节点的状态及其路径代价取决于传感器序列,不同传感器序列,节点的状态及路径代价是不同的[16]。为此,提出改进的VA以满足本文应用。
假设以传感器节点状态和决策步长分别代替VA的节点状态和路径长度。此时,VA的节点状态不再是一个标量,而是包含了目标跟踪误差和使用代价的向量。相应地,路径代价由前后传感器节点实时计算获得。为了进一步降低算法复杂度,考虑到被动传感器的辐射代价为0,结合贪婪策略,当平台被动传感器能满足要求时优先调度被动传感器。
以N=3为例,改进VA搜索流程图如图2所示,其具体的执行步骤如下:
1) 初始化,根据目标信念状态bk获得k时刻目标状态Xk及其协方差Pk.


利用上述步骤能够快速求解最优传感器调度序列,若不存在最优解,则采用以下原则:

2)若在执行步骤2时搜索不成功,即下一时刻所有传感器均不能满足跟踪精度需求,则选择跟踪误差最小的传感器作为最优调度序列,以快速满足精度需求。
2.4 复杂度分析
3 仿真实验及结果分析
3.1 仿真参数设置
考虑N=4个平台在杂波环境下协同跟踪一个机动目标,用M=3个模型来描述目标运动,模型1为匀速直线,模型2为左转弯,模型3为右转弯。假设目标初始位置和速度分别为(15 km,4 km,5 km)和(-280 m/s,-260 m/s,0 m/s)。进一步,假设采样间隔τ=1 s,仿真时长为100τ. 在26~50τ时间内目标以角速度5°向右转,在51~74τ时间内向左转,其余时间做匀速运动。各模型初始概率为[0.8,0.1,0.1],不同模型之间的切换概率为0.025. 此外,假定杂波服从泊松分布,主动和被动传感器的虚假量测密度分别为3×10-9个/(m·mrad2)和1×10-3个/mrad2,检测概率为1,波门参数为4,门概率为0.999 7.
各平台分布在Oxy平面内,均距离坐标原点5 km,相互间隔90°. 平台上主动和被动传感器探测范围分别为60 km和10 km. 主动传感器的斜距离标准差分别为100 m、50 m、50 m和20 m,方位角标准差分别为10 mrad、5 mrad、5 mrad和2 mrad,对应的俯仰角标准差与方位角一致。各平台被动传感器性能一致,其方位角和俯仰角标准差均为5 mrad. 各平台主动传感器辐射代价设为[1,2,2,3]。仿真实验中,所有仿真结果均为500次独立蒙特卡洛仿真取平均值。
3.2 仿真结果分析
3.2.1 不考虑切换代价
图3为不同精度阈值和决策步长下的累积辐射代价。由图3可知,随着跟踪精度阈值的提高,可以调度更多的被动传感器满足需求,因此其累积辐射代价更小。相同跟踪精度阈值下,随着决策步长的增加,其累积辐射代价更小,即系统能够获得更优的调度序列。此外,累积辐射代价随着决策步长的增加,其下降幅度逐渐变小,而且决策步长越大其计算复杂度越高。因此在实际应用中,需要权衡各个要素,选择合适的决策步长。
以跟踪精度阈值ρd=50 m为例,表1给出了不同算法不同决策步长的搜索性能对比。表1中ES为穷举搜索,UCS为标准统一代价搜索,表中UCS算法和改进VA的百分比为其相应的节点打开数与ES算法节点打开数的比值。图4为UCS算法和改进VA的节点打开百分比。由表1和图4可知,UCS算法以代价为顺序进行搜索,有效提高了搜索效率,但其节点打开数依然较大且需要较大的存储空间。相比于UCS算法,本文提出的改进VA能够显著地减少节点打开数、降低存储空间。图5为不同决策步长的累积辐射代价。图5中,最优值对应的曲线是由UCS算法获得(之后不再赘述),随着决策步长增大,系统能够搜索到更优的调度序列,使得其累积辐射代价更低,进而验证了长时调度模型的必要性。此外,由于改进VA采用贪婪策略降低搜索空间,当决策步长H>1时,其只能获得次优解,对应的累积辐射代价要略高于最优值。结合图3可知,随着决策步长增加,累积辐射代价下降幅度变小。因此,考虑到算法复杂度,之后的仿真实验以H=4为例。
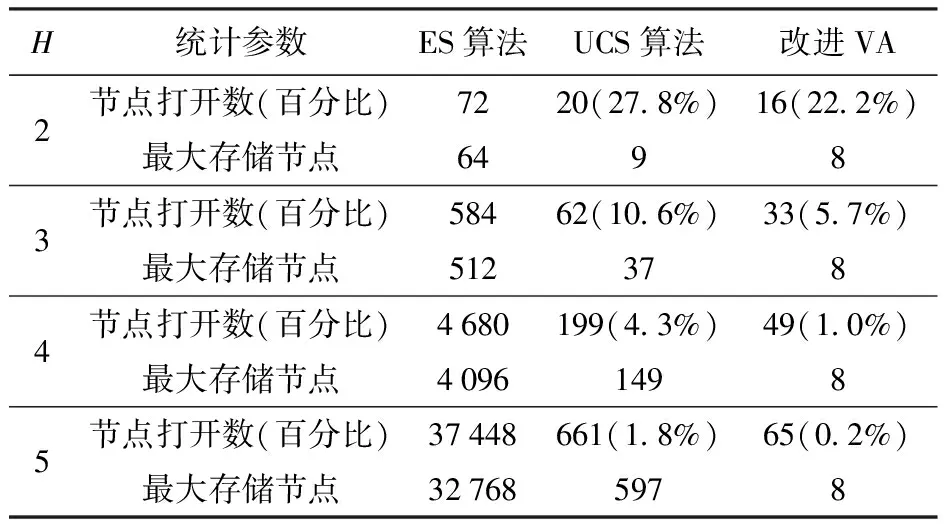
表1 算法搜索性能对比
为了验证本文调度方法的有效性,引入随机调度方法(RSM)、最近邻调度方法(CSM)以及短时调度方法(MSM)进行对比。以ρd=50 m为例,图6为不同调度方法下的目标均方根误差(RMSE)对比。由图6可见,RSM和CSM不能依据跟踪精度阈值,自适应地调度传感器满足任务需求。而MSM和本文方法能够根据阈值要求,自适应地调度传感器以满足任务需求。此外,由于目标机动,在模型切换阶段,其RMSE不能满足任务需求,符合实际情形。图7为不同时间下的累积辐射代价。由图7可知,在整个时间范围内,RSM和CSM的累积辐射代价总体较高。本文方法(H=4)要优于MSM(H=1)。同时,考虑到本文方法采用改进VA,因此其累积辐射代价要略高于最优值。
图8为本文方法下的平台及传感器调度序列。结合图6可知,初始阶段目标较远且跟踪误差较大,为了满足跟踪精度需求,本文方法频繁调度主动传感器以满足精度需求。随着目标靠近平台,系统频繁地调度被动传感器以降低辐射代价,从而解释了图7中在中间阶段MSM和本文方法累积辐射代价几乎不变的原因。当目标再次远离平台时,系统会再次频繁地调度主动传感器以满足精度需求。因此,通过多平台主被动传感器协同跟踪,能够有效地满足跟踪任务需求、降低辐射代价。
3.2.2 考虑切换代价
由3.2.1节可知,不考虑切换代价时,虽然能够获得较低的辐射代价,但会频繁地发生切换、稳定性差。为此,引入切换代价,以权衡系统辐射代价和切换代价。取平台切换代价cp=1,传感器切换代价cs=0.5. 图9为不同平衡系数下累积辐射代价和累积切换代价的关系。由图9可知:平衡系数较小时,系统更注重稳定性,其累积切换代价较小;当平衡系数较大时,系统更注重生存性能,其累积辐射代价较低。不失一般性,取平衡系数为0.6,以权衡系统累积辐射代价和累积切换代价。
图10为不同方法下累积代价对比。由图10可知,RSM和CSM的累积总代价较高,本文方法以多步预测进行决策,要优于MSM以单步预测进行决策。同时,由于最优值能够搜索到更优的调度序列,其累积总代价更低。此外,引入切换代价,MSM、本文方法和最优值的切换代价相差无几,均能较好地平衡系统累积辐射代价和切换代价。
图11为考虑切换代价的平台及传感器调度序列。对比图8可知,当不考虑切换代价时,调度过程中频繁发生切换,其平台切换次数为30.6,同一平台内传感器切换次数为16.0. 当引入切换代价时,其平台切换次数仅为10.7,传感器切换次数为21.8. 引入平台切换代价后,调度过程中平台切换次数明显降低,更易实际实现。同时,由于平台切换代价大于传感器切换代价,为了降低系统辐射代价,根据目标函数优先调度同一平台内的主动或被动传感器。因此,在调度过程中,需要根据任务需求、综合各个因素,选择合适的平衡系数,以满足任务需求及其实际应用。
4 结论
本文建立了基于POMDP的传感器长时调度模型,引入目标跟踪精度、传感器辐射代价和切换代价,构建了长时代价函数;给出了基于IMMPDA算法的目标信念状态更新方法和基于PCRLB的机动目标长时精度预测方法,提出了改进VA搜索长时调度序列。得出以下结论:
1)所提改进VA以累积辐射代价略上升为代价,显著降低了搜索空间和存储空间。
2)不考虑切换代价时,与已有调度方法相比,所提长时调度方法能够获得更低的累积辐射代价,生存性能更优。
3)考虑切换代价时,所提长时调度方法累积代价更低,克服了传感器频繁切换、稳定性更好。
猜你喜欢
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
天津外国语大学学报(2021年1期)2021-03-29 03:07:20
疯狂英语·新策略(2019年9期)2019-10-17 01:51:34
趣味(语文)(2019年5期)2019-09-02 01:52:44
海峡姐妹(2017年12期)2018-01-31 02:12:22
作文与考试·初中版(2017年12期)2017-04-19 20:24:45
河北科技大学学报(2015年5期)2015-03-11 16:16:37
中学生(2015年12期)2015-03-01 03:43:53
电测与仪表(2014年2期)2014-04-04 09:04:00
电力自动化设备(2013年11期)2013-09-18 02:55:16