基于SDN 的分布式无线网络架构及控制器配置策略
2019-02-14 06:15魏德宾
火力与指挥控制 2019年12期
洪 波,魏德宾
(1.大连大学生命科学与技术学院,辽宁 大连 116622;2.大连大学通信与网络重点实验室,辽宁 大连 116622;3.大连大学信息工程学院,辽宁 大连 116622)
0 引言
传统网络设备不仅要完成数据转发,同时要具有生成和管理数据转发规则的控制功能[1-3]。SDN 网络数控解耦,能够更好地解决当前传统网络面临的资源规模扩展受限、组网灵活性差、难以快速满足业务需求等问题[4-6]。
高动态大跨度的无线网络给网络性能带来了新的挑战:高动态的拓扑结构容易导致通信链路的不稳定;大跨度的网络特性容易导致节点间的通信时延长。随着网络规模的不断扩大,单一控制器的SDN 网络已经满足不了高动态大跨度网络的健壮性和鲁棒性需求,从而影响全网的通信质量,甚至会引起网络的瘫痪[7-8]。
为了解决上述问题,本文提出了分布式SDN 网络的概念,并将物理上分散的控制器形成控制器集群。这样一来,既可以弥补单一SDN 控制器网络承载力弱和抗毁性差的问题,同时又可以提升网络的可靠性和可扩展性。目前,分布式SDN 架构分为完全分布式和分层式两种[9-11]。
完全分布式SDN 架构采用的是扁平式控制方式。完全分布式SDN 架构通常将整个SDN 网络划分为多个互不相交的区域,每个区域中都设置了一个SDN 交换机集合,通过一个或多个控制器来实现对SDN 交换机集合的管理。这种完全分布式架构减小了交换机和控制器之间的数据传播时延。完全分布式的SDN 架构中的控制器在物理上分处各个不同且不相交的区域,但在逻辑上是掌握全网状态的全局控制器。因此,一旦网络拓扑发生变化,分布各地的控制器需要同时更新,此时,交换机仅需重新调整与控制器间的地址映射即可,无需进行繁琐的更新操作,所以,完全分布式的结构对数据层产生的影响较小,但是其共享机制复杂且负载不易控制。
分层式SDN 架构采用层次控制方式。上层全局控制器掌握整个网络状态的全局信息,并对下层局部控制器的负载均衡和一致性协调负责。而下层的局部控制只对本区域负责。层次式的控制器有两种交互方式:一种是下层局部控制器和上层全局控制器之间的交互;一种是上层全局交换机之间的交互。所以,局部控制器之间不需要进行信息共享等交互,只需处理好全局控制器之间的信息交互。分层式架构的局域内控制时延小且控制器连接机制简单,但是,全局事件时延大,扩展性差。
鉴于此,本文针对高动态大跨度无线网络特点,结合完全分布式SDN 架构和分层式SDN 架构的优势,提出了一种分布式的软件定义无线网络DSDWN(Distributed Software Defined Wireless Network),并基于该架构设置了主从控制器和事件传播系统,提出了控制器配置算法和主控制器选择算法,以减少网络通信时延,解决网络高动态和大跨度等特征带来的问题。
1 DSDWN
1.1 系统架构

图1 DSDWN 系统
本文将完全分布式的SDN 架构运用到主从控制器的网络中,其系统结构如图1 所示。系统根据控制域进行划分,每个控制域均有一个主控制器(Master_Ctrl)和多个从控制器(Slave_Ctrl)。在同一个控制域内,控制器形成集群,拥有该区域的网络视图,每层控制器集群中设置一个主控制器,各层的主控制器通过事件传播系统共享全局信息。
1.2 事件传播系统
主控制器间事件的传播采用发布/订阅消息模式,如图2 所示。每个控制器订阅网络中的数据信道、控制信道及自身信道,并被授予权限以发布和订阅信息。控制器将本地网络和应用程序发布到数据信道中,针对一个特定的控制器事件和OpenFlow 命令在相应控制器的信道内发布。此外,每个控制器必须利用控制信道周期性地通告自身信息。
负责控制器通信服务的发布/订阅消息模式需提供以下服务:
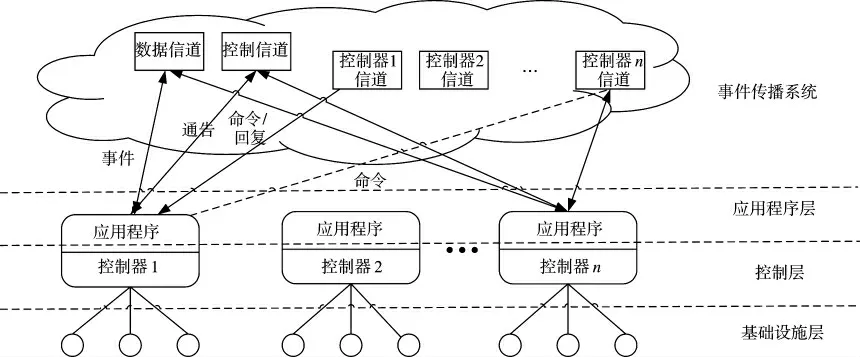
图2 事件传播系统
1)提供发布事件的持久性存储(提供有保证的事件交付),保持同一个控制器发布事件的顺序;
2)免疫网络分割,每个分割必须独立继续运行并在重新连接时实现同步;
3)尽量减少传播事件所需的跨站点的流量,即一个站点的控制器应该从附近的控制器得到大多数其他站点的更新,以避免跨区域连接的拥塞;
4)加强访问控制,以确保访问拥有权。
WheelFS 分布式文件系统[12]是一个可实现上述事件传播的发布/订阅消息模式。WheelFS 带来了应用程序的可控性、一致性、耐久性以及根据语义线索的要求放置数据的能力。语义线索可以直接嵌入在路径名中,以改变文件系统的行为。WheelFS分布式文件系统采用目录表示信道并采用文件表示信息,因此,为检测信息的到达,控制器应用程序对目录进行定期轮询。
此外,使用WheelFS 还能够免疫网络分割。一旦网络被分割,每个分割上WheelFS 能够继续独立运作。控制器会得到分割断开时其他分割中所有发生的事件,经过重播后使得所有控制器的网络级视图重新一致。
2 控制器系统配置策略
2.1 问题描述
在DSDWN 架构中,组成控制器集群的前提是对控制节点进行选取,进而部署交换机节点。本文用G=(V,E)表示该无线网络,各网络参数如表1所示。

表1 无线网络参数
2.2 算法设计
现有的配置策略有基于聚类算法[13]的控制器集群算法和基于贪婪算法[14]的控制器配置两种。基于聚类的控制器配置算法的优势在于可用于降低一个控制器所连通信节点中的所有链路的时延最大值,使得每个通信节点到控制器的最大值都不会太高。基于贪婪的控制器配置算法优势在于节点控制器间的平均时延较小。然而,在本文提出的分布式SDN 系统结构下,以上两类算法都无法实现最优控制器节点的选择,故需设计新的控制器配置策略。
假设无线网络通信周期为T,T 划分为S 个时间片,一个时间片内,控制器Ck与交换节点v 间的时延记作d(v,Ck),控制器个数为M,计算权重uk。

结合以上描述,本文设计的控制器配置算法的具体步骤为:
Step1:依就近原则对全网进行区域划分R={R1,R2,R3,…,RL};
Step2:对于每个Ri,依据权重计算公式,按升序方式生成权重序列为{u1,u2,…,uM,…,uN},则初始聚类中的控制器为{v1,v2,…,vM};
Step3:聚类中添加符合d(vi,v)≤Dreq,i=1,2,…,M 的节点V;
Step4:对已有聚类进行迭代,重新计算权重并升序排列,控制器则由选出局部最小节点替代。
Step5:重复上述步骤,直到所有的节点都包含在某一聚类中。
3 主控制器选择策略
对于已经获得的控制器集群,还需从中选择出主控制器,以实现控制域之间的正常通信。为保证主控制器与其他节点间的通信在时延、链路连接时长、资源等各方面均为最优,本节利用多目标优化算法实现了主控制器的选择。
3.1 问题描述
令t 时刻下控制器集群所在的卫星网络为G(t)=(V,E(t)),0≤t≤T,其中节点集合为V={v1,v2,…,vs},E(t)是链路集合。对链路参数进行定义,如表2所示。
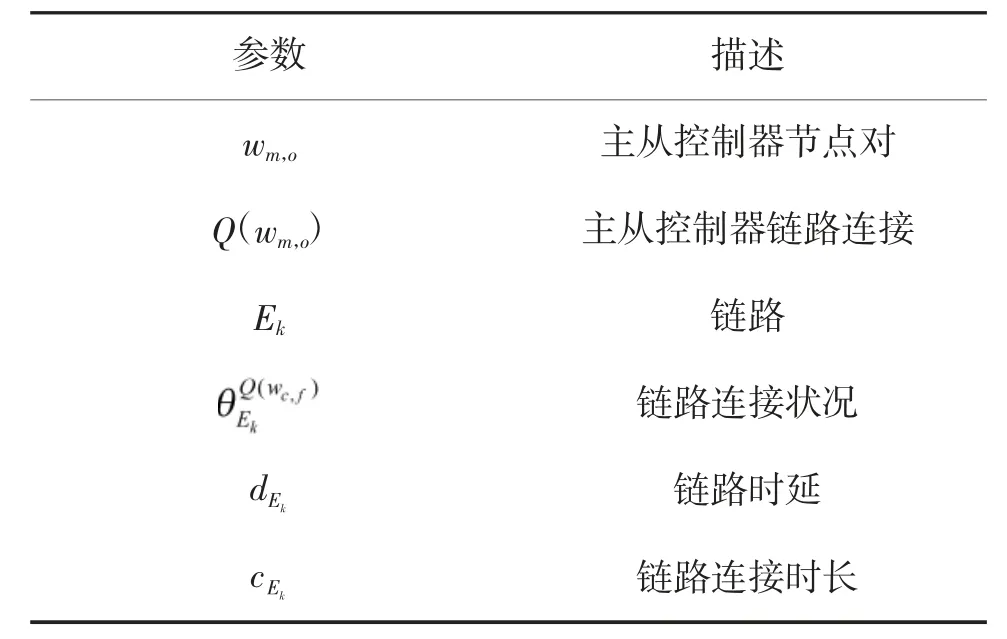
表2 链路参数
其中链路连接状况函数为:

用m 表示节点集合V={v1,v2,…,vs}组成的控制器系统中共有m 类资源,每个节点上有若干资源。
对链路连接时长c,链路总时延d,及节点的资源Rj进行多目标优化,其优化函数和约束条件如下:

将上述问题通过数学描述简化为单目标优化问题,如下式:

3.2 权值计算

本文的权重是指,把第1 个属性链路连接时长的权ω1和第2 个属性总时延的权ω2之比记为α12,第2 个属性总时延的权ω2和第3 个属性节点资源的权ω3之比记为α23,以此类推,构成决策矩阵。则

式中,I 是单位矩阵,若矩阵A 中的值估计准确,上式严格等于0;若估计不够准确,则A 中元素的小的摄动代表本征值的小的摄动,于是有


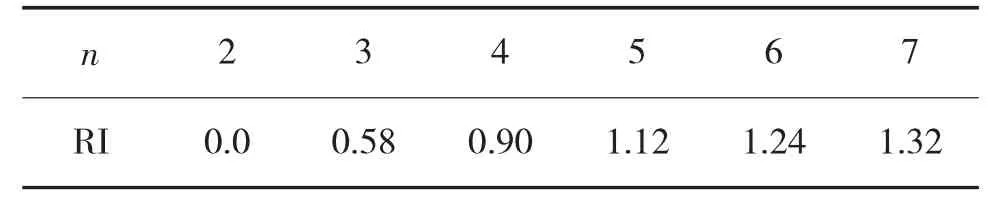
表3 阶数为n 的矩阵对应的RI 值
此处CR 应不小于0.1,否则必须重新考量w,可由式(7)求出。
4 仿真与性能分析
4.1 仿真参数设计
本文基于mininet 平台,采用floodlight 作为控制器,对文中所提出的架构及配置策略的性能进行仿真验证,仿真在基于主从架构的网络模型中进行,其仿真的参数如表4 所示。
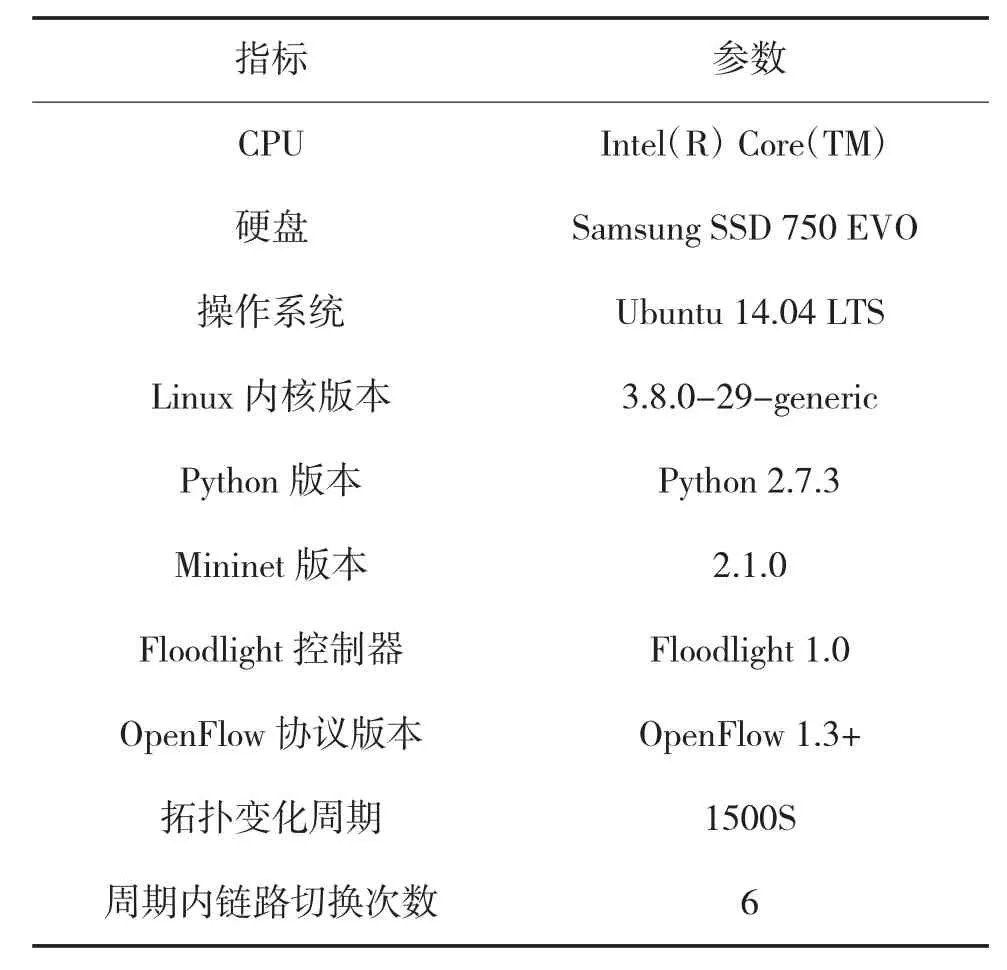
表4 仿真参数
4.2 控制器配置策略性能仿真
依据第3 节设计的算法和以上仿真参数进行仿真,其时延仿真结果如图3 所示。

图3 时延性能对比
由图3 可知,本文算法在时延方面比贪婪算法降低了13%~18.2%,比聚类算法降低了8.3%~15%。且当控制器个数M 值越小时,本文算法的优势更加显现。
4.3 主控制器选择策略性能仿真
本节对提出的基于多目标优化的控制器选择策略进行仿真验证,仿真对象为4.2 中得到控制器集群。
在仿真中,定义链路连接时长权值为ω1,总时延权值为ω2,节点资源权值为ω3,权向量w=(0.25,0.55,0.2)T。
根据3 种属性权值设置计算得CR=0.07,因此,权向量估计可被接受。
在Other_Ctrl 中任选一个作为目的节点Destination_Ctrl1,再从Other_Ctrl 中随机选择Oth er_Ctrl1,Other_Ctrl2,Other_Ctrl3,比 较Master_Ctrl到Destination_Ctrl 及,Other_Ctrl1,Other_Ctrl2,Other_Ctrl3 到Destination_Ctrl 的路由开销。这里的路由开销为传递数据分组时使用的控制分组总和。仿真中hello 包发送周期为10 s,仿真时间为300 s,仿真结果如图4 所示。
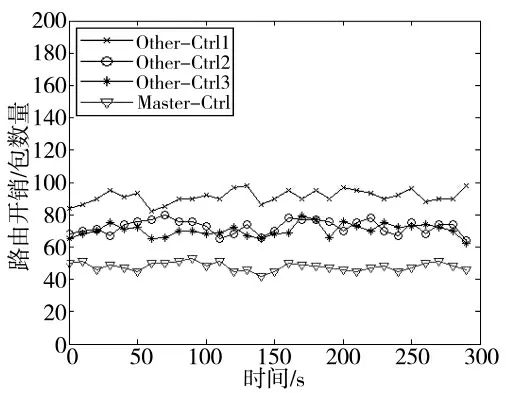
图4 路由开销性能对比
由图4 可知,Other_Ctrl1,Other_Ctrl2,Other_Ctrl3的路由开销均高于Master_Ctrl 的路由开销,最多高7.8%。这是由于通过本文主控制器策略选择出来的Master_Ctrl 优化了链路连接时长,总时延及节点资源,拥有更好的性能。
5 结论
本文基于分布式SDN 思想,设计了一种分布式的软件定义无线网络架构DSDWN,利用事件传播系统实现了各集群主控制器的通信及同步。仿真结果表明,本文提出的控制器配置算法在时延上有明显优势,更适合无线网络环境控制器的配置部署,提出的基于多目标优化主控制器选择策略,路由开销更小,综合性能更优。
猜你喜欢
火力与指挥控制(2022年8期)2022-09-16
网络安全与数据管理(2022年6期)2022-07-13
载人航天(2021年5期)2021-11-20
移动通信(2021年5期)2021-10-25
电脑知识与技术(2021年22期)2021-09-14
现代电子技术(2021年7期)2021-04-08
电子技术与软件工程(2019年8期)2019-07-16
花火B(2019年3期)2019-04-27
电子制作(2019年24期)2019-02-23
电子制作(2019年23期)2019-02-23