
三维电子腹腔镜系统
2019-02-13 07:16毛昊阳梁向南何裕源毛亮亮
中国医疗器械杂志 2019年1期
【作 者】曹 伦,毛昊阳,梁向南,何裕源,朱 祥,毛亮亮,邵 辉,何 超
微创(上海)医疗机器人有限公司,上海市,200031
0 引言
腹腔镜作为微创外科领域中最具代表的技术,能够直接呈现内脏器官的表面组织形态帮助医生进行疾病的诊断和治疗。近年来,随着半导体行业和计算机技术的发展,市场上有两种主流的腹腔镜:光学腹腔镜(以下称光学镜)和电子腹腔镜(以下称电子镜)。
光学镜由物镜组、中继系统和目镜构成[1],其中中继系统为棒镜组起导像和修正像差的作用,分辨率高。但是光学镜结构固定、不能弯曲、重量大、外径大、操作舒适性差。电子镜通过图像传感器将光信号转为电信号,经图像处理后在监视器中获得真实、高清画面[2-4]。和光学镜相比,高清电子镜分辨率已经达到1 080 P可与光学镜媲美;同时电子镜减少了光能损失,采集到的图像光亮度高、画质好;除此以外电子镜重量轻、体积小、成本低装配工艺简单,可以设计头部弯曲结构,比如:奥林巴斯Endo EYE FLEX 3D采用头部可弯曲设计可以取消非零视向角的镜头加工。
传统的腹腔镜都是二维(2D)图像,缺少腹腔内组织的深度信息。医生需要经过长期严格的学习训练才能适应,手术过程中还需要通过触碰、透视投影、遮挡等方式大致判断病灶位置[5],这不仅仅会延长手术时间,还有可能伤及组织器官。近几年,随着三维(3D)技术的发展,3D腹腔镜的出现可以弥补2D腹腔镜的缺陷。国内外研究表明,3D成像技术在术野距离判断[6-9]、手术正确率、手术时间、学习曲线[10-12]等方面均优于2D成像技术。
目前,市场上流行的三维电子镜依然被国外产品垄断,主要品牌有卡尔史托斯、奥林巴斯。国内还没有三维电子腹腔镜上市。本文介绍的三维电子腹腔镜系统基于双目视觉原理自主设计了双光路物镜系统;采用GPU方式实现了1 080 P、30 Hz高清图像实时处理。目前该三维电子腹腔镜已经实现了量化生产,并且进行了多例动物试验,具有良好的成像效果。
1 系统的工作原理及组成
1.1 双目立体视觉原理
双目立体视觉基于视差原理利用两个完全相同的摄像系统(焦距 f 和其他内部参数均相同)从不同角度拍摄被测物体图像,通过计算图像中对应点之间的位置视差获取被测物体的三维信息。双目立体视觉有两种实现方式,一种是两摄像系统与光轴成一定角度,另一种是两摄像系统与光轴平行。本文采取后者获取立体图像信息。
如图1所示,两摄像系统x轴重合,轴线距离为b(基线);y轴相互平行;光轴z与成像平面垂直。其中:左右两摄像系统中心分别为各自原点OL、OR;像平面为CL、CR与各自原点距离为焦距f;空间任意一点P在左侧摄像系统的坐标为(XP,YP,ZP);OLP、ORP与左右像面交点为Pl、Pr。由三角形相似原理可知:

因此,只要找到空间中左右两个摄像系统的对应点,通过摄像系统标定的参数就可以获得被测物体的三维信息。
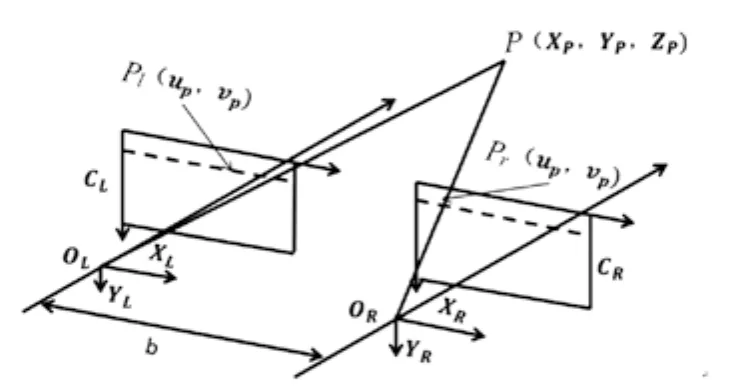
图1 平行光轴双目立体视觉系统示意图Fig.1 Binocular stereo vision system with parallel optical axis
1.2 系统组成和工作原理
三维电子腹腔镜系统主要包含三维电子腹腔镜、内窥镜图像处理器两大部分。三维电子腹腔镜具有高分辨率三维镜头,能够实时采集手术区域的三维立体图像信息,内窥镜图像处理器包含内窥镜图像处理主机、三维显示器、二维显示器及图像车。所有设备都放置在图像车上,内窥镜图像处理主机对采集到的信号进行处理,并运用立体成像算法,将图像信息传递至三维显示器及二维显示器。术者戴上三维显示器标配的三维眼镜即可从三维显示器上看到三维画面。
1.2.1 双光路物镜系统
三维电子腹腔镜实物图如图2所示,采用传感器前置方案,简化了光学系统结构,减轻了电子镜重量。与以往传感器置于手柄中相比,减少手柄体积提高了操作舒适性。

图2 三维电子腹腔镜Fig.2 Three-dimensional electronic laparoscopy
其物镜设计要求,如表1所示:视向角分别为0°和30°,视场角约为65°,镜头口径小于5 mm,畸变小于25%。
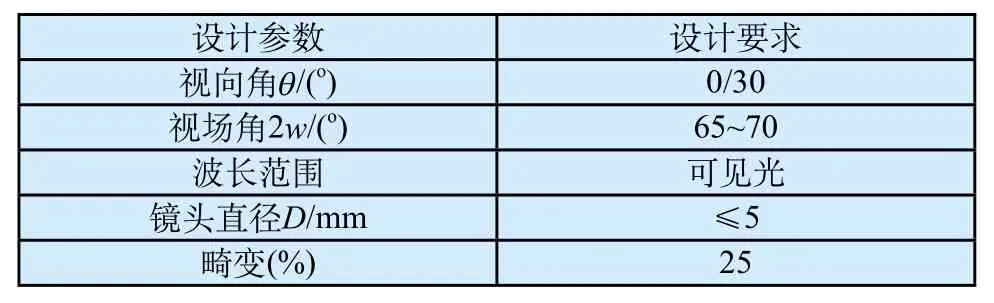
表1 物镜系统设计要求Tab.1 System design requirements
常用腹腔镜物镜系统结构示意图如图3所示,依次为负透镜组、正透镜组和双胶合透镜组。入射光经过负透镜组发散,再经过正透镜组会聚,最后经过双胶合透镜组修正像差,最终在像平面成像。负透镜组起到扩大视场角的作用。对于视向角为30°的物镜系统,还需在负透镜组前端添加转向装置,目前技术较为成熟的转向棱镜为反射式转向棱镜[13],其结构如图4所示,依次分别为保护玻璃、第一物镜、转向棱镜和第二物镜。
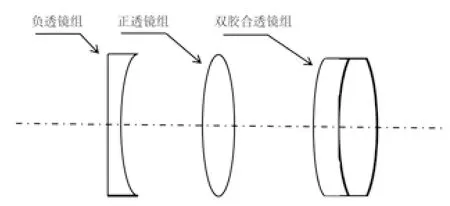
图3 物镜系统结构示意图Fig.3 Structure of objective lens

图4 反射式转向棱镜Fig.4 Reflecting steering prism
通过选择合适的初始结构并对其进行像差分析和优化,得到视向角为0°和30°的物镜组。其点列图、光学传递函数MTF曲线、场区/畸变如图5所示。从图中可以看出无论是0°还是30°视向角物镜系统RMS Radius均小于5 μm,GEO Radius均小于11 μm;1/2奈奎斯特频率处MTF大于0.2,MTF曲线接近衍射极限,畸变小于25%。因此,该物镜具有较好的分辨率和成像质量。

图5 0o和30o视向角点列图、MTF曲线、场度/畸变图Fig.5 Spot diagram, MTF curves, field curvature and distortion map when the viewing angle is 0° and 30°
1.2.2 基于GPU的1 080 P、30 fps高清图像实时处理系统
微创外科手术要求腹腔镜显示系统具有实时性、稳定性、高分辨率等特点。内窥镜图像处理主机结构如图6所示,内窥镜图像处理主机前面板上有开关按钮,USB接口和腹腔镜通信接口。采集的数据信息传递到内窥镜图像处理主机后,由图像处理主机对数据处理并运用立体成像算法在三维监视器和二维监视器中显示被测物体信息。

图6 内窥镜图像处理主机Fig.6 Medical video system of endoscopy
系统结构如图7所示,该系统先由信号采集模块实现被测物体图像采集并将图像数据传输至信号接收编码模块对接收到的信号进行接收和数据编码;再经信号解码模块对接收的信号解码并将解码后的数据传输至信号处理模块;最后将处理后的数据传输至1 080 P高清3D和2D医用监视器。信号处理模块是整个系统核心,主要实现图像数据ISP算法处理、确定图像左右、数据缓存、控制图形界面、数据交互、2D/3D切换、白平衡等功能。
本系统图像的采集和显示分辨率均为1 920×1 080,采用3D录播设备对动物实验过程录制,截图如图8所示,整个系统成像清晰,满足医生手术需求;视频帧率为30 Hz,动物实验过程中镜头移动或者旋转不会引起拖影或者模糊的现象,具有良好的动态效果和稳定性。

图7 1 080 P、30 fps高清图像实时处理系统Fig.7 Real-time image processing system with 1 080 P, 30 fps

图8 动物实验截图Fig.8 Picture of animal experiment
2 临床应用价值
三维电子腹腔镜技术和传统电子腹腔镜技术相比,提高了手术成功率、减少了手术时间,医生在三维视野内手术操作更加精准。国外MCINTIRE等[14]分析了162篇文献184项实验证实三维电子腹腔镜技术在空间操作、物体辨别和位置识别上有绝对优势;他们还专门挑出与临床相关的文章进行分析,其结果显示三维电子腹腔镜技术在教学和腹腔镜手术训练中具有明显优势。
国内三维腹腔镜技术虽然比较落后,但是也有很多医师对其进行临床分析,比如:李汉忠[15]在3D腹腔镜下完成62例泌尿外科手术,其中包含有肾囊肿去顶术、全膀胱切除、肾盂输尿管成形术等等;姚健等[16]运用3D腹腔镜进行了胆囊切除、胃癌肛管癌根治、阑尾切除等手术。他们的手术结果表明三维腹腔镜性能优于传统腹腔镜。
综上所述,三维腹腔镜技术对手术医生和患者来说都有好处:对于初学腹腔镜的医生来讲可以帮助他们尽快熟悉腹腔镜手术视野,提高手术准确率;对于患者来说提高了手术成功率,降低了对组织器官的伤害。
3 总结
本文提及的三维电子腹腔镜系统,已经突破理论和工艺困难实现了量化生产,并且进行多次动物实验,效果良好。本公司生产的三维电子腹腔镜系统某些指标已经高出国外某些知名品牌。综上,本公司生产的三维电子腹腔镜具有以下优点。
采用1 080 P全高清传感器前置的方案,简化了腹腔镜光路结构;自行设计的物镜系统提升了腹腔镜光学分辨率。
采用GPU方式对图像进行实时处理,目前已经可以实现1 080 P、30 Hz高分辨率腹腔镜图像处理,镜头移动或者旋转过程中无拖影或者模糊的现象,具有良好的动态效果和稳定性。
本公司生产的三维电子腹腔镜弥补了国内无上市三维电子腹腔镜缺陷,将打破国外垄断局势,具有广泛的应用前景和显著的临床应用价值。
猜你喜欢
桂林电子科技大学学报(2022年3期)2022-10-26
现代仪器与医疗(2022年1期)2022-04-19
现代仪器与医疗(2021年6期)2022-01-18
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
现代仪器与医疗(2021年4期)2021-11-05
中国内镜杂志(2017年2期)2017-03-20
中学生数理化·八年级物理人教版(2015年11期)2015-11-30
