
纹影系统的灵敏度的实验设计与分析
2019-02-13 10:22:28吴慧兰曾朝元代珍兵段满益
物理实验 2019年1期
吴慧兰,胥 佳,曾朝元,代珍兵,段满益
(四川师范大学 物理与电子工程学院,四川 成都 610101)
纹影法是由Toepler. A于1864年基于用纹影仪系统对流场进行显示和测量而提出的光学方法[1]. 该方法是利用光在被测流场中的折射率梯度正比于流场的气流密度的原理,将流场中密度梯度的变化转变为成像平面上相对光强的变化,使可压缩流场中的激波、压缩波等密度变化剧烈的区域成为可观察、可分辨的图像. 纹影系统的可视化功能广泛应用于流体力学实验中,特别是在气流的边界层、燃烧、激波、气体内的冷热对流以及风洞或水洞流场的检测[2-8]. 如1981年冯天值等人利用纹影技术对风洞进行检测[2];2004年Kashitani. M等人用聚焦纹影系统对双楔翼型模型的流动进行显示[3]; 2006年Neumann. T等人利用纹影可视化超声波场[4],2018年胡斌等人也利用纹影技术直接观察到声光介质内部的超声波图像[5];2010年房喜荣等人将纹影技术应用到超燃流场中[6]. 随着实验和工程上的需求发展,对纹影系统灵敏度检测要求越来越精细. 实际中纹影系统利用刀片成像,图像背景亮度分布不均,而仅用图像平面的光强变化来表示密度变化没有考虑到背景亮度分布不均带来的影响,因此,对背景亮度进行有效修正就显得尤为重要. 本文将对纹影系统理论进行修正,并设计纹影系统实验来对理论进行验证.
1 理论分析
图1(a)是纹影成像的原理图,光源a发出锥形光投射至凹球面反射镜,被反射镜反射后聚焦于b点,调整光源与反射镜距离为2倍焦距,反射光将聚焦在2倍焦距处,即接近光源a处的b点. 使用刀片c在接近b点处遮挡部分反射光线, 使用相机作为像屏接收纹影像,当光路中无扰动时纹影图像呈现为背景. 当在d区域有气流密度变化时,背景中将呈现明显可见的气体流动图样,成像即纹影图像,如图1(b)所示.

(a) 实验原理图

(b) 实验效果图图1 纹影成像原理及实验效果图
平行光照射相位物体,光线通过区域无扰动时成像平面光波复振幅为F(x,y)=eiφ(x,y),光强分布I(x,y)=c是常量;当光线经过区域出现扰动时,相位物体各点厚度不同或折射率不同,会引起随空间位置变化的相位延迟使得成像平面光强分布不再是常量,构成了相位物体的轮廓或细节以此可视化密度分布. 为方便定量计算将光线的空间位相延迟转化为光线光程差的形式,则因为扰动区域气体密度分布不均匀,空间折射率不为常量,光线偏折角度不等,导致成像光强分布不均以显示密度差异[9-10].
1.1 刀口位置对纹影成像的影响
1.1.1 光线经扰动区域的偏转角
根据图1(a)所建立的直角坐标系, 光线经过扰动区域后偏折角度为Δα[11]
(1)
加热恒温板以恒温热源场来提供扰动实现密度差异,扰动区域气体近似为理想气体,则利用理想气体物态方程
pV=νRT,
(2)
得到恒温热源场T(x)中密度梯度与温度梯度之间的转换关系
(3)
根据洛伦兹-洛伦茨关系,气体折射率趋近1,折射率和密度的关系简化为格拉德斯通-戴尔公式

(4)
式中K是格拉德斯通-戴尔常量,与气体种类和光波长有关. 将(4)式代入(1)式中,用密度ρ代替折射率n得到密度表示的偏转角
(5)
由(5)式知,若密度场分布已知便可以求得光线偏转角. 将(2)和(3)式代入(5)式,得温度表示的光线偏转角
(6)
即可通过测量温度场来进行实验验证.
1.1.2 纹影图像光强差分布
纹影系统使用刀口遮挡光线聚焦点b的部分光线,使得纹影像光强分布差异明显. 但是由于刀口的遮挡使得纹影成像在无扰动时的背景光强减弱,且分布不均. 若用光强分布方法来分析有扰动情况,就必须考虑刀口遮挡对背景光强分布的影响,不能直接用观察到的光强来描述密度,即用纹影图像背景光强与纹影图像光强之间的差值表示密度分布将会更加精确,简称光强差. 将恒温热源场温度分布函数代入(3)和(6)式,解出光线偏转角随密度的分布
(7)
若同一水平面温度认为近似相等,因此可忽略密度在yoz平面的差异,则被积分函数不含z,积分得通过z1-z0扰动厚度区域的偏转角为
(8)
由纹影图像光强差分布关系[12]
(9)
式中ΔI为有扰动时的纹影图像的光强与无扰动时的背景光强之差,I为背景光强,x0是光线经折射后偏离原路径的距离,s为光斑的直径,x为刀口距光斑中心的距离,l为折射点到刀口的距离,如图2所示.

(a)正视图

(b)侧视图图2 刀口挡光示意图
将光线偏转角表达式代入(9)式得纹影图像光强分布与密度分布的关系为
(10)
1.2 刀口厚度对纹影成像的影响

(11)
即光强差与刀口厚度成正比,对纹影图像的影响是非常显著的.

图3 刀口厚度实验的光路示意图
2 实验设计
2.1 纹影图像测量
图4为实验装置图,光源采用LED蓝光灯,避免白光等强光作为背景造成的背景太亮的影响;使用美工刀片挡光,反射镜半径R=22 cm,焦距f=77 cm,相机作为成像屏.

(a)

(b)图4 实验装置图
2.2 恒温热源场测量
恒温热源实验测量装置如图4(b),在扰动区域外从恒温板所在水平高度建立一维坐标系,每间隔1 cm测量1个温度值,恒温板使用小支架悬空在镜子底部,以防止与实验装置的热传导,接通电源待恒温热源场稳定后,使用电子测温计测得热源场的分布.
根据热传导方程[13-14]
(12)
由于恒温板热源强度稳定,因此Tt=0,(12)式简化为
kTxx=-F(x).
(13)
而恒温热源强度随空间位置分布为[13-14]
(14)
结合(13)和(14)式解出恒温板在竖直方向上提供的温度分布为
(15)

以恒温板为原点,1 cm为梯度测量竖直方向上温度分布,多次测量并进行数据拟合,如图5所示,拟合函数为
T(x)=86.4e-x+28.95.
(16)

图5 恒温热源空间温度分布
从实验结果所拟合公式将(15)式简化为
T(x)=ae-x+b.
(17)
由图5可知恒温热源场的温度在竖直空间呈指数分布,且随空间高度的增加而指数减小. 结合(2)和(10)式可得所对应的纹影图像亮度差为
(18)
即得出纹影系统对于测量密度差异的灵敏度[15].
2.3 纹影图像亮度差空间分布
建立与温度场测量时相同的坐标系,每间隔1 cm使用Tracker测量1次背景光亮度和图像亮度,并计算差值ΔL. 图6为实验纹影图像的亮度差值空间分布曲线,由图6可知以亮度差表示的对应空间光强差分布与理论曲线趋势相一致,即使用亮度差分析纹影图像的方法是可行的.
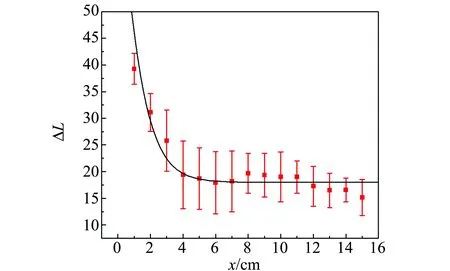
图6 纹影图像亮度差空间分布曲线
3 结果讨论
3.1 刀口位置
根据刀口位置与纹影图像光强差分布关系[2]
(19)
依次改变刀口位置,得到纹影图像光强差所对应的亮度差与刀口位置关系,如图7所示.

图7 刀口位置对纹影图像亮度差的影响
由以上数据可以看出,纹影像亮度差分布与刀口位置的关系是正相关,即随着刀口遮挡越多,纹影图像越明显. 但刀口遮挡越多,会导致纹影像亮度分布越不均匀和不完整,不利于图像分析,因此,本纹影系统的刀口位置在0.01 cm处观察效果最佳.
3.2 刀口厚度
设置刀口厚度d,R=11.5 cm,l=154 cm,测量相对应纹影图像亮度差变化图如8所示,随着刀口厚度的增加,纹影图像的亮度差逐渐增加,且增加越来越快,可以看到图8中最后的数据与理论曲线稍有偏差,主要是因为当刀口增加一定厚度后,由于其厚度所带来的立体角和衍射的影响不可忽略. 理论和实验结果表明,在一定条件下增加刀口厚度对纹影系统灵敏度的影响与增加刀口遮挡的面积的影响可以互相转换,但考虑到刀口边缘衍射等对于纹影图像的影响等,一般不采用增加刀口厚度的方法.

图8 纹影图像亮度差与增加刀口厚度关系图
图9是在上述恒温热源场条件下选取刀片遮挡60%光点测量出的纹影系统图像亮度差分布结果. 该结果是纹影系统亮度差值随密度变化趋势,这一结果与理论上的式(10)相吻合,可以看出理论图9(a)在很小一段密度变化内趋于线性变化,与实验值变化趋势相同,而理论值与实验值在数值上有很大差异,主要是因为理论值是纹影系统的光强差,而实验处理结果是由Tracker测得纹影图像的亮度值之差,图像亮度与实际光强之间有转换关系所导致的. 虽然无法直接测得光强值,但可以根据密度每改变1个单位所带来的亮度差值之差来表示纹影系统的灵敏度. 由实验结果可以得出图像亮度差随密度变化趋于线性,因此可以对实验结果进行线性拟合以表示纹影系统灵敏度. 拟合结果为ΔL=361.35-301.94ρ,即可认为本次实验中搭建的纹影系统灵敏度为301.94 m3/kg.

(a) 理论计算结果

(b) 实验测量结果图9 纹影图像亮度差随密度分布曲线
4 结束语
本文设计纹影实验装置和采用分析图像亮度差的方法直观描述纹影系统灵敏度,主要研究纹影系统的刀口位置和刀口厚度对系统灵敏度的影响. 纹影图像亮度差分布与刀口位置和刀口厚度都是正相关,且随着刀口遮挡越多,纹影像越明显. 实验趋势和理论结果吻合,并且采用1个单位密度变化所对应的纹影像的亮度差的变化来量度纹影系统呈现密度差异的能力,该方法不仅消除了纹影系统成像背景亮度分布不均带来的影响,还使得纹影系统的边界效应得到了一定的消除,测量结果更精确可靠.
猜你喜欢
河北农机(2020年10期)2020-12-14 03:13:42
兵器装备工程学报(2020年10期)2020-11-05 06:11:02
河北省科学院学报(2020年4期)2020-03-19 02:02:40
现代职业教育·职业培训(2018年9期)2018-05-14 09:57:14
牡丹(2018年31期)2018-01-03 12:33:26
大陆桥视野·下(2017年11期)2017-10-31 11:02:24
电子制作(2017年24期)2017-02-02 07:14:16
化工学报(2016年7期)2016-08-06 07:11:51
中国卫生标准管理(2015年25期)2016-01-14 09:29:16
中国卫生标准管理(2015年6期)2016-01-14 05:17:16
