
多机被动定位协同平台自适应选取研究
2019-02-13 01:06:26
雷达科学与技术 2019年6期
(中国航空工业集团公司雷华电子技术研究所, 江苏无锡 214063)
0 引言
定位精度是被动定位能否发挥其探测效能的关键因素[1]。多机测角被动定位系统的定位精度除了与雷达角度测量误差、平台位置误差有关外,还和协同编队与辐射源目标相对位置有关[2]。雷达测量误差与平台位置误差受到传感器装备发展的制约,很难在短时间内有大幅提升。因此要提高系统的定位精度,重点需要从协同编队与辐射源目标相对位置方面考虑。
目前大部分研究成果都集中在对协同编队的运动轨迹进行实时控制与规划方面,其中文献 [3-4]对多机测角被动定位载机编队轨迹优化进行了研究,文献[5-6]对多机时差被动定位载机编队轨迹优化进行了研究。上述研究对提高系统定位精度有较好的效果,但载机的运动受到控制与规划,约束了飞行员的空战战术。另外,在低速数据链条件下,机间通信能力受到较大限制,参与目标位置解算的协同平台数目是有限的,因此低速数据链条件下载机运动无约束的被动定位精度提升方法的研究具有现实的意义。
本文提出了一种基于低速数据链的多机测角被动定位协同平台自适应选取方法,可根据协同平台与目标空间态势的实时变化,动态选取参与目标位置解算的协同平台,在保证协同平台数目不大于设定值的条件下,使多机测角被动定位系统的性能最优,同时该方法对载机的运动也没有约束。
1 问题描述


图1 系统协同平台k时刻位置分布图
2 协同平台自适应选取函数

(1)

由式(1),对目标位置、方位角和平台位置取微分(用符号Δ表示),可得
(2)

dV=CdX+dXs
(3)

(4)
系数矩阵:
(5)
由式(3)可得目标位置误差矢量为
dX=(CTC)-1CT(dV-dXs)
(6)
相应的误差协方差矩阵为
(7)
系统定位误差的圆概率误差值(CEP)可表示为
(8)

(9)
(10)

(11)

两平台系统定位误差的圆概率误差值(CEP)具体表达式为
(12)
3 协同平台自适应选取设计与计算步骤
协同平台自适应选取的基本思想是将系统定位圆概率误差值作为优化设计指标,寻求协同平台数目不大于设定值的条件下,系统定位性能最优,即考虑协同平台中采用哪个子集参与目标位置解算。
3.1 自适应选取模型
假设空中存在n个平台,参与目标位置计算的协同平台数目不超过m个,则协同平台编队组成的样本空间为

it≠il∀t,l}
(13)
将系统圆概率误差值(CEP)写成一个与样本空间S相关的函数,即σR(CEP)=f(S)。将其作为目标函数进行优化设计,协同平台自适应选取系统优化设计模型描述为
(14)

图2 系统优化设计框图
3.2 穷举优化算法
本文所要求解的问题为具有约束条件的最优化问题,可描述为
(15)
由于协同平台编队组成的样本空间的参数元素是有限的,因此拟采用穷举法求解该优化问题,具体步骤为:
1) 根据动态网络拓扑平台数目,计算获取协同平台编队组成的样本空间S;
2) 在样本空间编队组合元素中任意两平台基线距离需小于设定值的约束条件,统计满足约束条件的集合元素,得到约束参数集;
3) 根据式(14)计算优化函数值,保留函数最小值,同时记录相应的协同平台编队组合元素。
4 仿真条件及结果分析4.1 仿真条件
各平台观测器角度测量误差为0.3°,符合零均值高斯分布,采样时间T=0.1 s,目标辐射源的初始位置为(200 km,200 km),位置导航误差为100 m,符合零均值高斯分布,目标辐射源蛇形机动,径向速度200 m/s,切向速度200 m/s,转弯半径5 km,航向角-90°。协同平台菱形编队、倒T形编队与倒Y形编队时,参与目标位置计算的协同平台数目不超过3个;协同平台正三角形编队与倒三角形编队时,参与目标位置计算的协同平台数目不超过2个。各协同平台编队初始运动状态信息描述如下:
1) 菱形编队,各平台初始运动状态信息分别为(0,0,200,200),(20,0,200,200),(0,20,200,200),(20,20,200,200);
2) 倒T形编队,各平台初始运动状态信息分别为(0,0,200,200),(14.1,-14.1,200,200),(-14.1,14.1,200,200),(14.1,14.1,200,200);
3) 倒Y形编队,各平台初始运动状态信息分别为(0,0,200,200),(0,-20,200,200),(-20,0,200,200),(24.1,24.1,200,200);
4) 正三角形编队,各平台初始运动状态信息分别为(0,0,200,200),(5.17,-19.31,200,200),(-19.31,-5.17,200,200);
5) 倒三角形编队,各平台初始运动状态信息分别为(0,0,200,200),(19.31,5.17,200,200),(5.17,19.31,200,200)。
上述平台运动状态信息矢量分量分别为北向位置、东向位置、北向速度和东向速度;单位分别为km,km,m/s和m/s。
各协同平台构型如图3~图7所示。
图3 菱形编队
图4 倒T形编队
图5 倒Y形编队

图6 正三角形编队
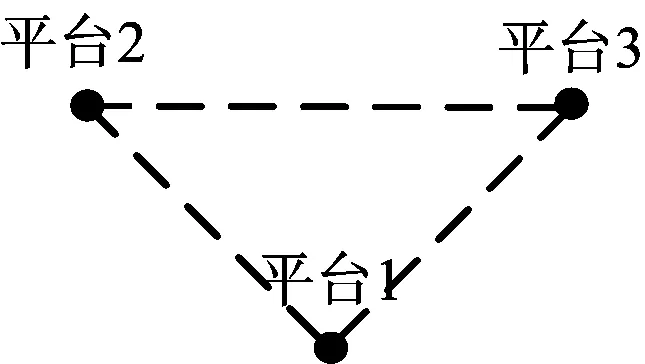
图7 倒三角形编队
4.2 仿真结果与分析
图8~图12分别给出了5种不同平台编队距离跟踪误差曲线。相比较而言,在参与目标位置计算的协同平台数目相同的条件下,采用平台自适应选取技术对参与目标位置计算的平台选取后,其组合滤波的距离跟踪精度误差结果要小于其他固定编队组合的滤波误差结果。
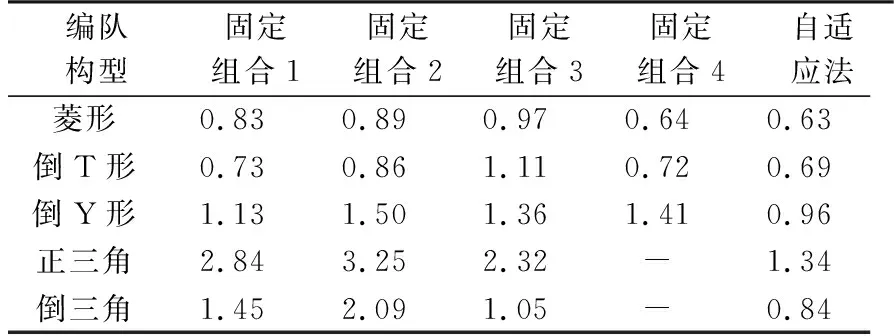
表1 距离跟踪误差百分比比较表 %

图8 菱形编队距离跟踪误差曲线
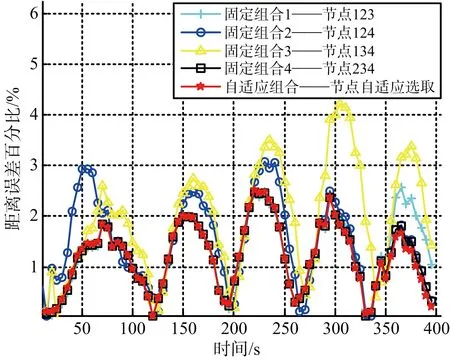
图9 倒T形编队距离跟踪误差曲线
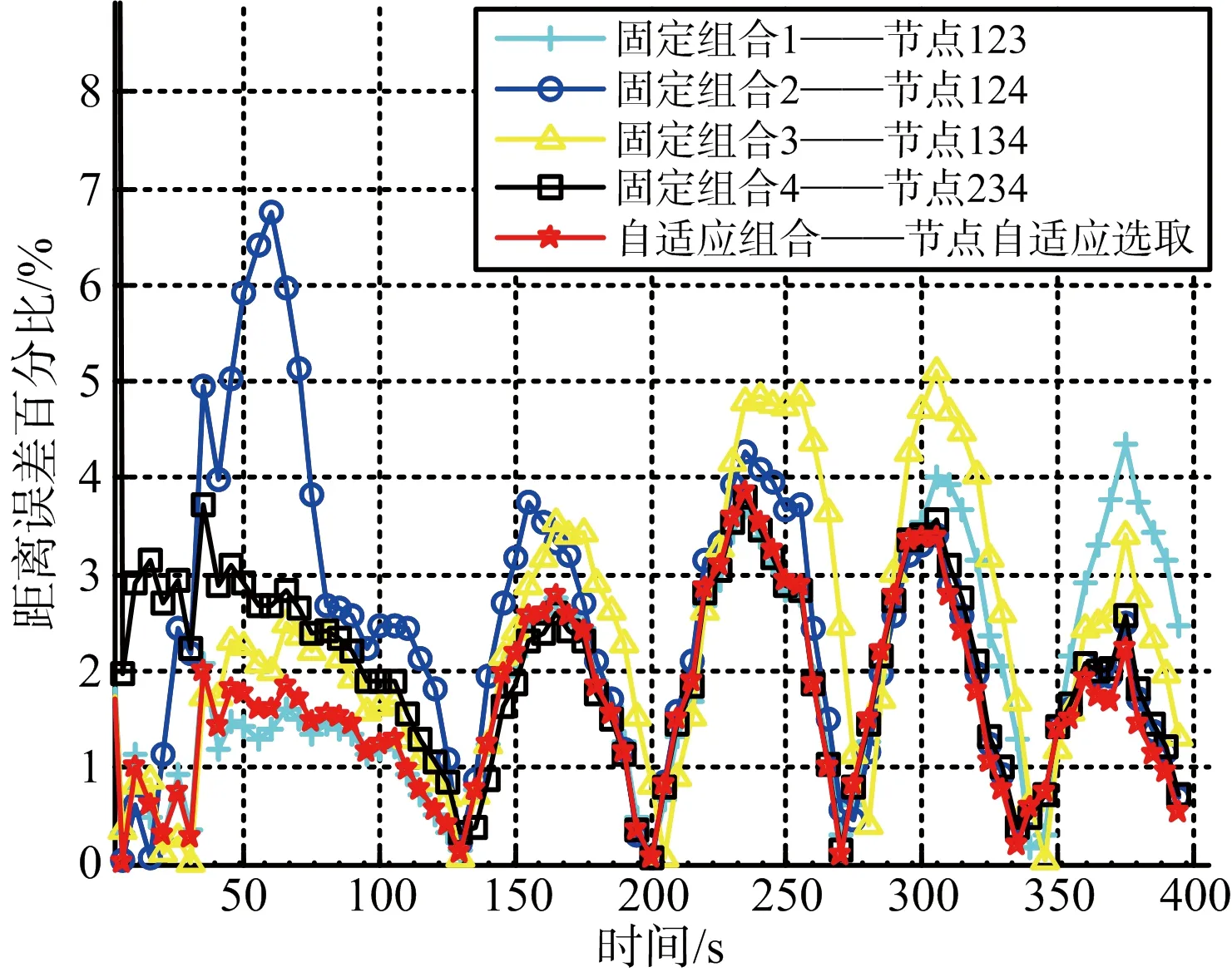
图10 倒Y形编队距离跟踪误差曲线

图11 正三角形编队距离跟踪误差曲线
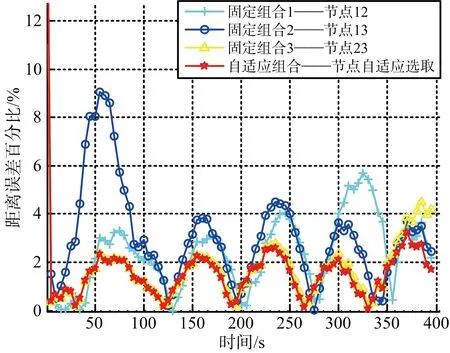
图12 倒三角形编队距离跟踪误差曲线
5 结束语
本文紧密结合工程应用背景,针对多机测角被动定位精度提升问题,提出了一种低速数据链条件下载机运动无约束的协同平台自适应选取方法。仿真结果表明,本文提出的协同平台自适应选取方法能够针对不同场景,根据敌我双方空间态势,动态选取参与目标位置解算的协同平台,大大提高了多机被动定位系统的定位精度。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
军事文摘(2023年5期)2023-03-27 08:56:26
天津外国语大学学报(2021年1期)2021-03-29 03:07:20
疯狂英语·新策略(2019年9期)2019-10-17 01:51:34
趣味(语文)(2019年5期)2019-09-02 01:52:44
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
北京航空航天大学学报(2017年3期)2017-11-23 05:14:41
海军航空大学学报(2015年4期)2015-02-27 13:45:56
导航定位与授时(2014年2期)2014-04-27 13:41:08
