
基于比例归一化LMS算法次级通道模型辨识
2019-02-10 08:54陈媛媛周德好
导航与控制 2019年6期
陈媛媛,周德好,王 强
(1.南京理工大学,南京210094;2.北京航天光华电子技术有限公司,北京100039)
0 引言
作为公共交通工具的一种,地铁已经在国民经济发展中发挥出了越来越重要的作用。受限于地面空间的种种局限,我国的地铁多建设于地下。为确保乘客及地铁工作人员所处环境的舒适性,以及确保地铁设备的安全稳定运行,通常需要使用大功率的轴流风机来满足地下通风、散热、排烟等的需求。这些风机主要包括隧道风机、回排风机、新风风机、排热风机、变功率大风量空调等,以及用于各类机房、车控间等通风需求的小系统风机。这些风机必须无间断运行,并且已成为地铁通风隧道的主要噪声源。常见的地铁通风隧道的噪声控制方式,如消声器、表面加贴吸声材料等,均为被动噪声控制手段。其缺点在于:1)对气流产生较强阻抗作用,不利于节能减排的需求; 2)对低频噪声(20Hz~2000Hz)的控制效果差,而在通风隧道中多为低频噪声;3)噪声控制设备安装复杂,综合费用高昂。
主动噪声控制技术已被证明是一种行之有效的噪声控制方法,在低频段具有很好的降噪效果。主动噪声控制技术基于声波干涉原理,利用次级声源作为控制源,生成与初始噪声等幅反相的次级噪声,再将其与初始噪声进行叠加,从而达到消除噪声的目的[1]。控制的关键点在于通过误差声传感器实时跟踪噪声场的变化,以动态调节控制器参数。滤波⁃X 最小均方 算 法 (Filtered⁃X LMS,FXLMS)是最为典型的控制算法,FXLMS算法中包含一项滤波⁃X或滤波⁃U的信号矢量,它是输入信号矢量与次级通道脉冲响应函数的卷积[2]。次级通道(Secondary Path)是指系统中从次级声源到误差声传感器之间的信号通路,其传递函数特性对于整个主动噪声控制系统有着非常重要的影响。其影响主要表现在:1)次级通道模型误差影响系统的稳定性和降噪效果[3];2)次级通道模型参数在很大程度上影响着控制算法的计算量[4]。可见,对于次级通道模型的准确辨识,获得精确的传递函数是实现主动噪声控制的关键因素之一。
对次级通道的辨识是影响主动噪声控制效果的一个关键因素。1989年,Eriksson等[5]提出了有效的次级路径辨识方法。但是,由于引入了附加噪声,导致主动控制过程与次级路径辨识过程之间产生了相互干扰,从而使得整个系统的性能出现了下降。相关研究者也做出了很多有意义的改进。针对Eriksson所提出的算法的不足,窦长胜等[6]提出利用误差预测滤波器来减少主动控制环节对辨识环节的影响,但其忽视了隔离附加噪声对控制器系数的影响,需要选用特定的激励信号才能取得满意的效果。Zhang等[7]采用了交叉更迭(Cross⁃updated)方法,使用了3个交叉更新的自适应滤波器,来尽量避免主动控制部分与次级路径辨识过程之间的相互干扰。Akhtar等[8]在Zhang的基础上避免了第3个滤波器的引入,将变步长LMS算法用于建模滤波器,取得了较好的性能效果。遗憾的是,Akhtar的方法忽略了控制滤波器及附加噪声对辨识的影响,且算法步长范围的控制也不能让人满意,难以被应用于实际。针对次级通道的不确定性,玉昊昕等[9]通过建立滤波⁃X最小均方算法(FXLMS)的等效传递函数,用线性时不变系统的稳定性判据求解算法的稳定条件,求得次级通路误差存在时收敛系数的取值范围,然后通过系统极点来分析此时算法的收敛特性,并研究收敛系数取值对次级通路误差的承受能力。针对含次级通道辨识的窄带ANC系统,为了降低辅助噪声对次级通道辨识的影响,提出了一种变遗忘因子、变步长的滤波⁃X加权累加最小均方算法[10]。利用互相关的误差信号构建了变遗忘因子策略,并通过遗忘因子构造了变步长策略,使系统获得了更优的参数值,更好地平衡了算法的收敛速度、跟踪能力及稳态误差之间的矛盾。但是,这些改进方法都无一例外地引入了额外的自适应滤波器,使得计算的复杂性大幅提高,产生了不必要的计算量,这一问题阻碍着噪声主动控制技术在微处理器平台上的实现。在主动噪声控制应用中,由于次级声通道的存在,将会使进入控制算法的误差信号产生延时,进而导致误差信号与参考信号二者在时序上出现差异,造成算法的不稳定。这一点也会因为复杂的声学环境而被放大,控制系统将无法正常地完成控制任务。达到满意的消声效果的必要条件是对隧道中声学环境的准确评估,这主要就需要对次级声通道进行辨识。
考虑到噪声主动控制的实际应用一般是基于微处理器平台实现的,在满足计算复杂度的前提下需尽可能快地提高其次级通道辨识的速度与准确性,这也是上述算法很难应用在实际场合中的主要原因。本文将自适应算法中较为成熟的 “比例”、“归一化”等思想应用在了地铁通风隧道的次级通道辨识场合,在不需要增加额外自适应滤波器的前提下改善了次级声学路径的辨识性能。
1 次级通道辨识
次级声通道的辨识就是对实际的声学物理通路传递函数的估计过程,其实际的物理模型一般被称之为对象。
由图1可知,主动噪声控制系统的核心是设计合适的控制器,其结构一般为线性自适应滤波器。线性自适应滤波器一般由两部分组成:特定结构设计的滤波器和相应的自适应算法。滤波器结构一般选定为有限脉冲响应(FIR)结构。在主动噪声控制的实际应用中,常用的自适应算法是基于最小均方误差准则的算法,其中包括最小均方算法(LMS)及以此为基础的改进算法。在实际的应用中,还必须就具体的应用背景对相关算法做出改进,本文所用的噪声控制算法是滤波⁃X最小均方算法(FXLMS)。
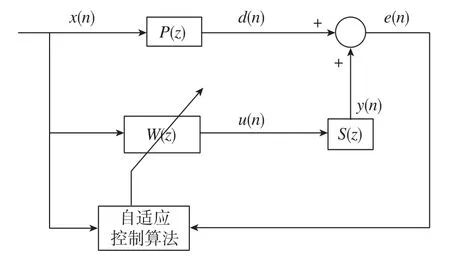
图1 主动噪声控制系统的原理Fig.1 Principle of active noise control system
在图1中,P(z)为参考传声器到误差传声器之间的主路径传递函数,S(z)为次级扬声器到误差传声器之间的次路径传递函数,W(z)为控制器传递函数,x(n)为初始噪声信号,d(n)为初始噪声经过主声学通道P(z)后的期望噪声信号,y(n)为次级声源发出的“抵消噪声”,e(n)为噪声抵消后的残余误差信号。由图1可得

假设控制器W(z)收敛到最佳值,此时误差信号 e(n)=0,即
则 W(z)可表达为

由式(3)可知,控制器传递函数W(z)是与次级通道传递函数S(z)密切相关的,次级通道的建模与辨识是必不可少的[11]。
设计次级声学路径的建模框图如图2所示。
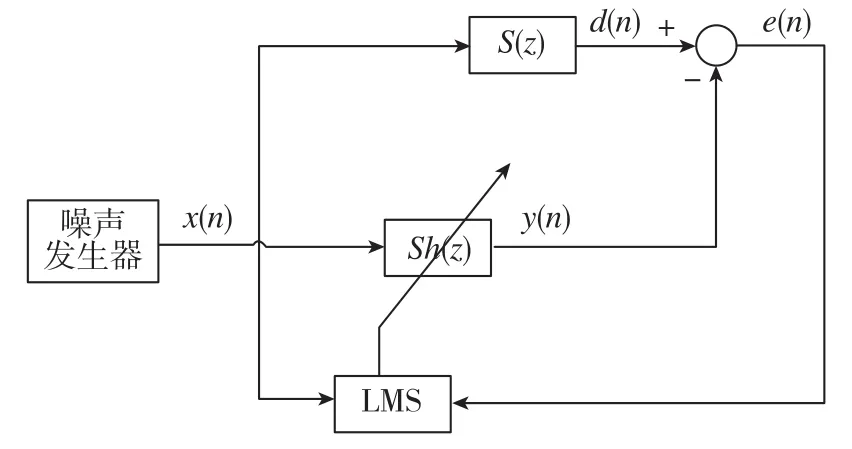
图2 次级声学路径建模框图Fig.2 Block diagram for secondary path modeling
在图2中,信号源为噪声发生器,x(n)为实际的噪声信号,S(z)为未知的次级声学路径传递函数,Sh(z)为通过自适应算法辨识出的模拟次级声学路径传递函数,e(n)为残差信号。假设传递函数Sh(z)权向量为Sh(n)=[b0(n) b1(n) …bM-1(n)]T,M 是滤波器长度,X(n)=[x(n) x(n-1) … x(n-M + 1)]T为输入向量,则自适应滤波流程为:
1)初始化;
2)更新:n=1,2,3,…
滤波:y(n)=ShT(n)X(n)
误差估计:e(n)=d(n)-y(n)
权向量更新:Sh(n + 1)=Sh(n)+ μe(n)X(n)
其中,μ是用来控制稳定性和收敛速度的步长参数。μ值越大,算法收敛越快,但稳态误差也越大;μ值越小,算法收敛越慢,稳态误差越小。综合考虑,一般必须满足0 < μ <2/MPin,Pin=E[X2(n)]为输入功率。采用固定步长μ,就很难满足算法追求的快速收敛性能。为了改善算法的快速收敛性能,对权向量的更新做归一化,权向量的更新表达式为

式(4)中,δNLMS为一极小正值,用于防止在初始化时由于分母为0而导致算法无法运行。
尽管在进行归一化后,算法的快速收敛性得到了一定程度的改善,但其尚不足以满足实际的应用需求。本文将比例的思想融入自适应算法中以加快算法的收敛速度,同时保持了较小的稳态失调量。比例化的自适应算法充分利用了冲激响应中的稀疏性(Sparse)的结构特征[12]。稀疏性结构特征是指这样一种特性:在描述冲激响应的大量数据中,大部分的系数均为0或较小的值,只有少量的系数具有较大的值。稀疏性通常用来衡量冲激响应的能量集中程度,狭小的封闭空间或回声路径等通常都是一个典型的稀疏性冲激响应(Sparse Impulse Response)。传统的自适应算法影响其收敛性能的一个原因就是其为所有的系数配上了相同的步长因子,这样就导致较小的系数能够很快得到收敛,但较大的系数需要经过多次迭代才能够收敛到最优值。利用比例思想的自适应算法为小系数配上了小的步长因子,为大系数配上了较大的步长因子,从而加快了其收敛速度。融入比例思想的自适应算法在其自适应过程中,通过引入一个步长控制矩阵K(n)来分别为各个滤波器系数赋予不同的步长。

式(5)中,M为滤波器的长度。
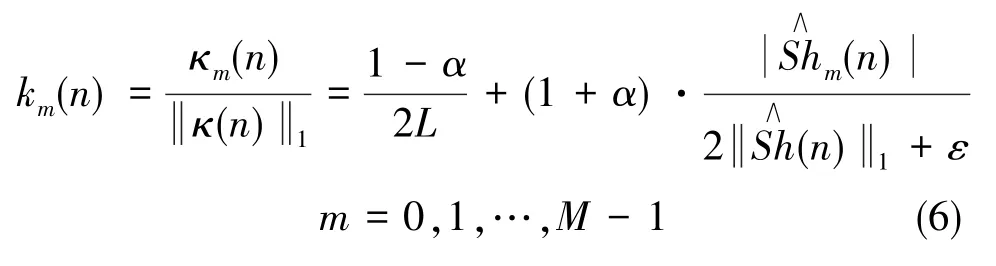

式(7)中,μ为算法的固定步长,K(n)为步长控制矩阵,δ为防止算法发散的一个极小正值。将式(5)代入式(7),即可得到比例归一化LMS算法。
2 数值分析与实验
评价自适应算法主要从收敛性能、稳态失调性能、计算复杂度、鲁棒性等几个方面来考虑。在主动降噪的实际应用中,对算法的评价将更加侧重于收敛性能、稳态失调性能。收敛速度的快慢可以表征算法能否在非平稳的环境中准确地跟踪权系数的变化;稳态失调则表征了在权系数收敛到最优值时,由噪声梯度估计引起的瞬时偏差产生的额外最小均方误差。由于在LMS算法中,系数的跟踪能力依赖于输入信号相关矩阵的特征值,在仿真中将采用多种稀疏度不同的冲激响应来充分验证算法的性能。
输入信号为白噪声信号,目的在于充分激励冲激响应的各个频率分量。在实际工程应用中,可以根据需要选择合适的输入噪声信号,用以激励特定的频率分量。其中,考虑到输入信号的自相关矩阵原因,LMS算法的步长选择为0.003(步长单位均为 1),NLMS与 PNLMS的步长则选为0.1。
图3为算法模拟的冲激响应。从图3中截取部分细节进行放大,红色曲线为初始冲激响应,黑色曲线为LMS算法的识别结果,蓝色曲线为归一化LMS算法的识别结果,绿色曲线为比例归一化LMS算法的识别结果。可以看出,对于该冲激响应,3种算法模拟出的冲激响应基本上均能与次级通道的实际冲激响应相吻合。但在冲激响应系数变化较大时,仍能看出PNLMS算法的吻合度要高于其他两种算法,这表现为绿色曲线对红色曲线的跟踪最为准确。图4为高稀疏度冲激响应条件下算法的仿真结果。从图4(a)可以看出,PNLMS算法的稳态失调量最小,LMS算法的稳态失调量最大,说明PNLMS算法的稳定性要好于其他两种算法。从图4(b)可以看出,PNLMS算法的收敛速度最快。在算法稳定的情况下,3种算法的最小均方误差均能稳定维持在一个很小的区间内,这充分说明PNLMS算法在处理具有稀疏性结构特征的冲激响应时的优势。
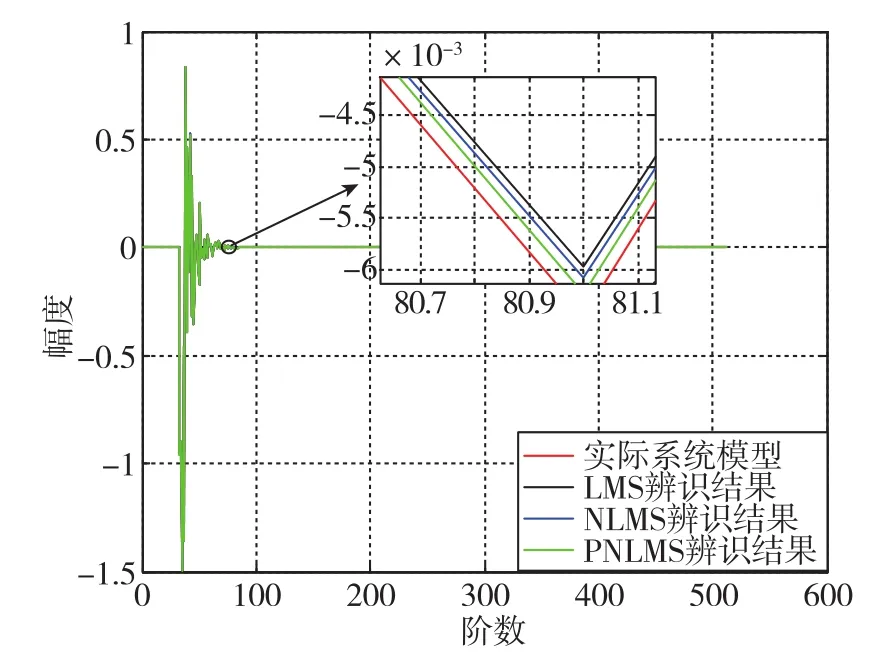
图3 算法模拟的冲激响应Fig.3 Impulse response simulated by algorithms
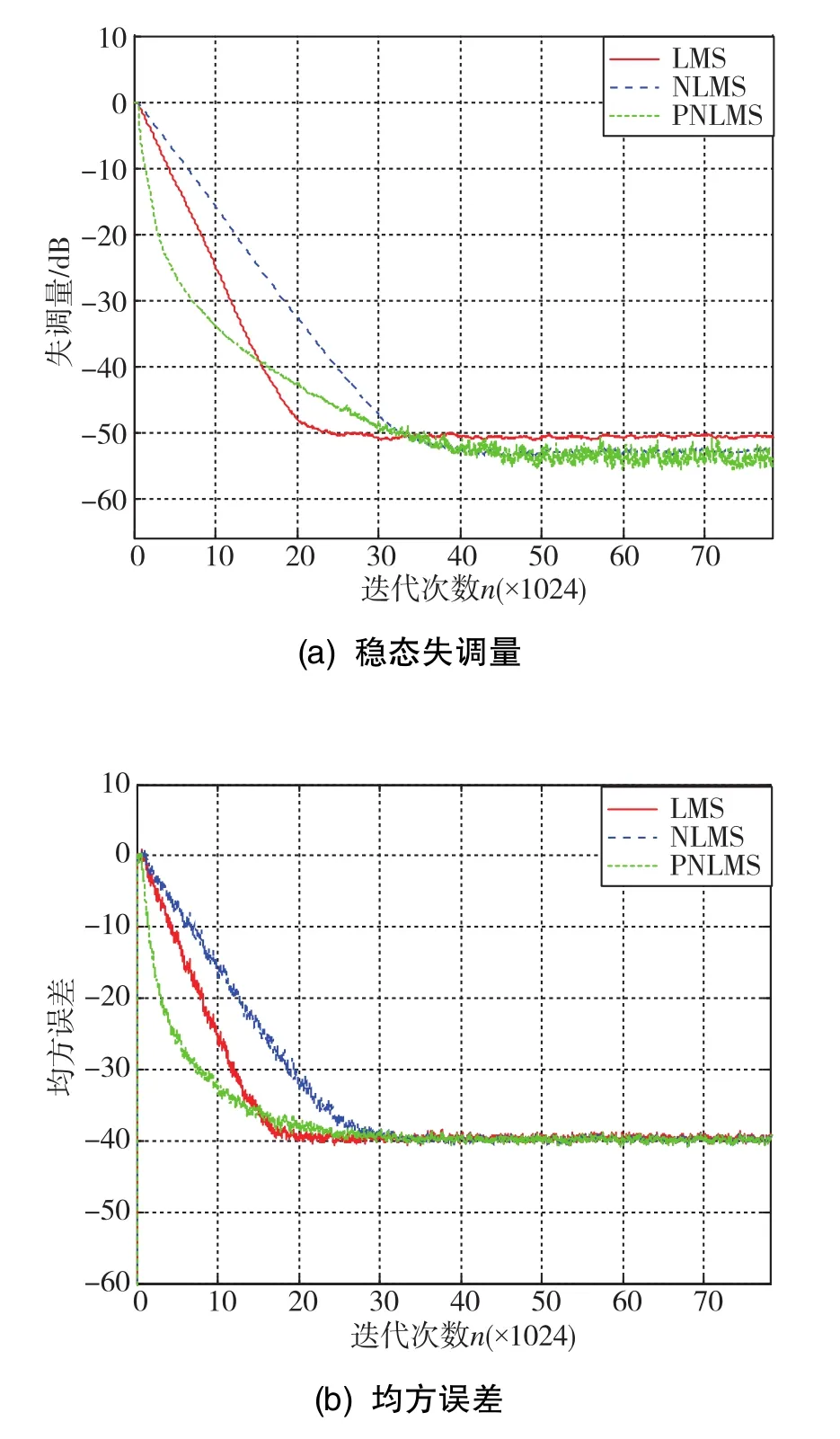
图4 高稀疏度冲激响应的算法性能对比Fig.4 Performance comparison of algorithms for impulse response with high sparse
图5为系统冲激响应在稀疏程度降低、其他参数均相同的情况下的仿真结果。可以看出,随着稀疏性程度的降低,LMS算法的性能有了较大的退化。在图5(a)中,LMS算法的稳态失调量逐渐增大;在图5(b)中,LMS算法的收敛速度也严重减慢。对比图4(b),在迭代次数为20时能够收敛退化,到迭代次数为30时才能收敛。同样,在稳态失调性能与收敛性能上,NLMS算法也有了一定程度的退化,只有PNLMS算法维持了很好的收敛性能,保持着较低的稳态失调量和较快的收敛速度。
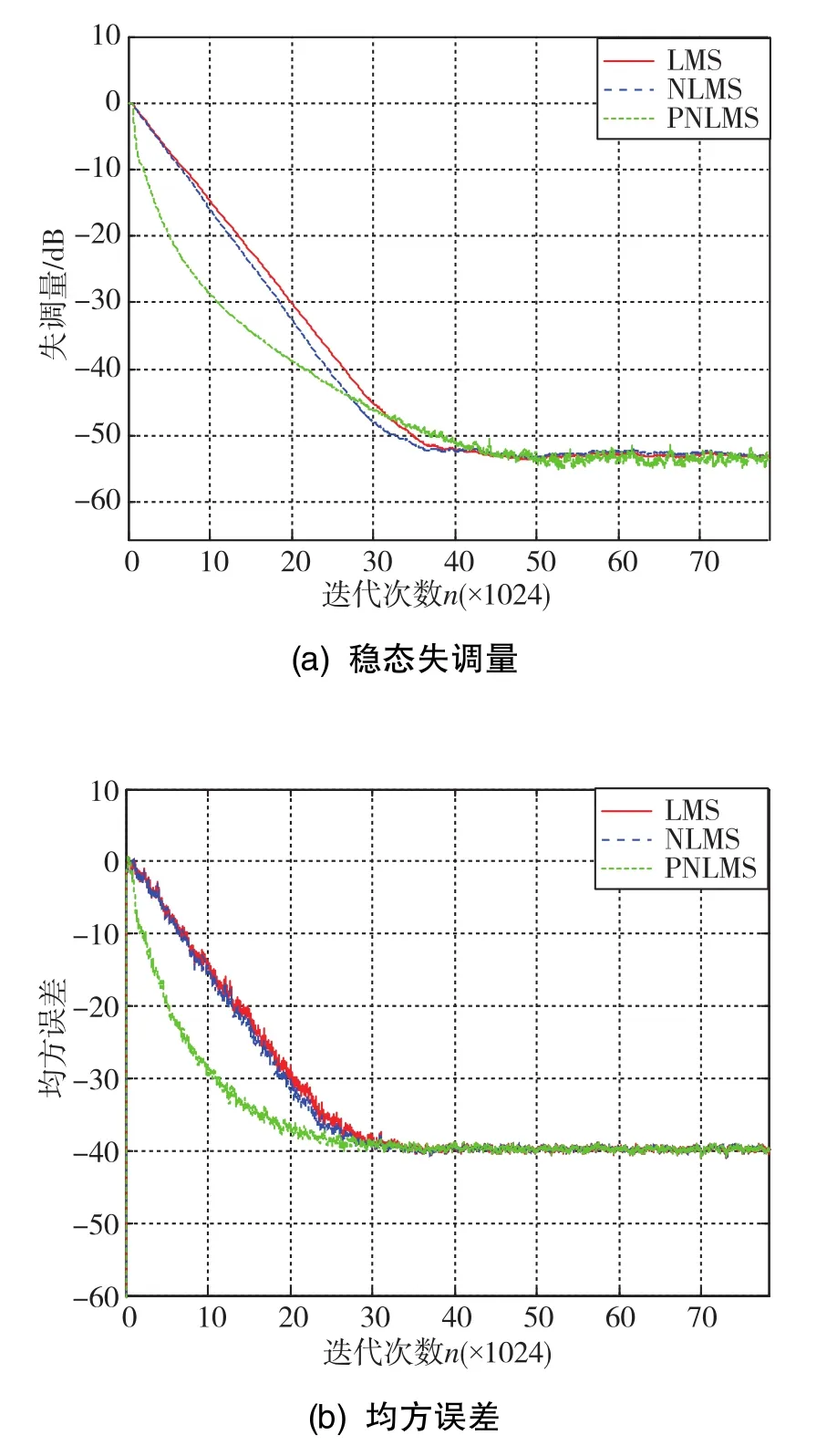
图5 稀疏度降低时算法性能对比Fig.5 Performance comparison of algorithms for impulse response with low sparse
为了对上述仿真结果进行验证,设计了地铁通风隧道噪声次级声通道的辨识实验。实验依据国标 《城市轨道交通车站站台声学要求和测量方法》(GB 14227⁃2006),测量时传声器应置于车站站台中部、距地面高度为1.6m的位置。传声器前端应朝向被测列车的轨道一侧,其轴向与线路方向垂直,测量时传声器应使用风罩。实验设计原理如图6所示。
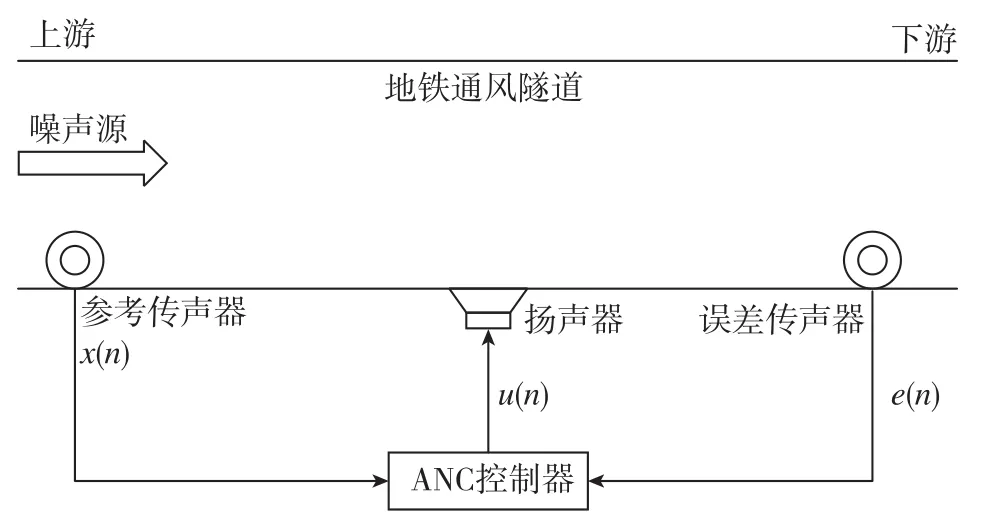
图6 隧道次级声通道辨识实验原理图Fig.6 Block diagram for secondary path modeling in tunnel
采集地铁通风隧道中的实际噪声,根据上述步骤,辨识出的次级通道冲激响应如图7所示。
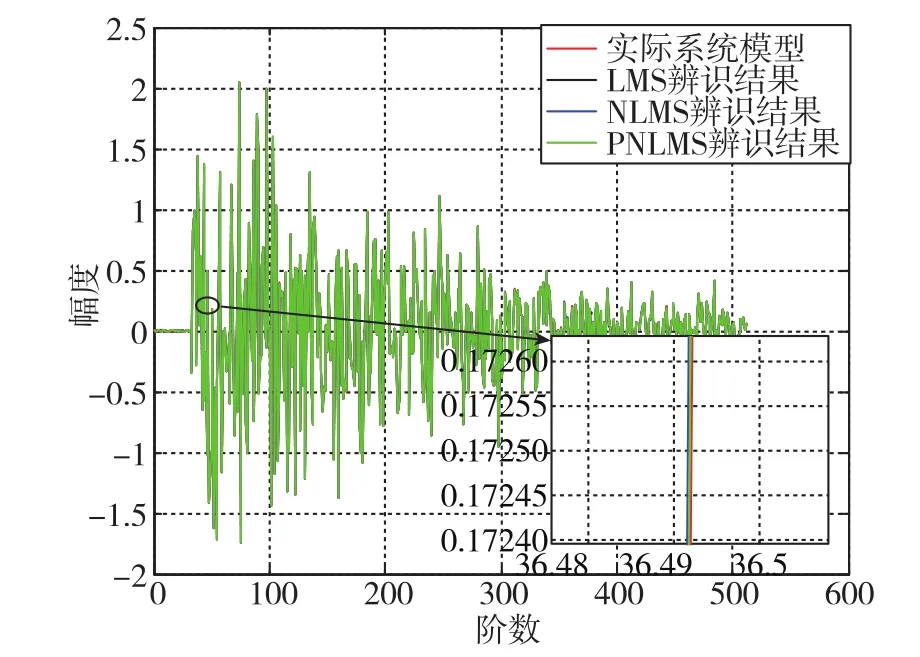
图7 隧道实际冲激响应Fig.7 Actual secondary path impulse response of tunnel
图8为冲激响应条件下算法的实际结果。由图8(a)可以看出,LMS算法的收敛速度明显慢于另外两种算法,且其稳态失调量最大,NLMS算法的稳态失调量也稍稍高于PNLMS算法。由图8(b)可以看出,PNLMS算法在收敛速度上占有一定优势,而LMS算法在70次迭代的时间内仍未完成收敛。在实际的地铁通风隧道主动降噪系统中,采用PNLMS算法不仅能够以较快的速度收敛到稳定状态,而且还能保证较小的稳态失调量,对整个主动降噪系统的稳定与性能都有着明显的优化效果。
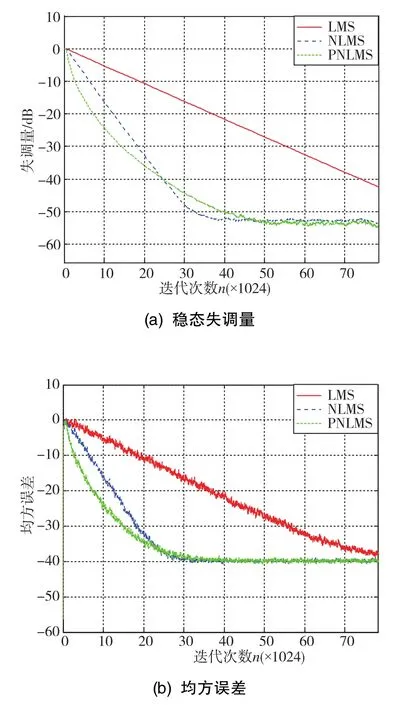
图8 实际冲激响应算法辨识性能对比Fig.8 Performance comparison of algorithms for the real sparse impulse response
3 结论
由于地铁通风隧道的复杂环境,次级通道的辨识问题始终是其噪声主动控制的一个重点。使用单一的LMS算法进行辨识,效果完全无法适应地铁通风隧道复杂多变的环境,故本文使用比例归一化改进的LMS算法来对次级声学通道进行辨识。从仿真与实验的对比结果可以看出,使用PN⁃LMS算法能够加快自适应算法的收敛速度,稳态失调性能也能保持恒定,可提升次级声通道辨识的精确性与及时性,最终使得噪声控制效果有了较大幅度的提升。值得说明的是,本文式(6)中的α的取值为固定值0,这会导致PNLMS算法的性能介于NLMS算法与LMS算法之间,无法始终保持最优性能。对不同的冲激响应进行预判,从而自适应地选择合适的α值,是本文进一步的工作重点。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
灌溉排水学报(2022年6期)2022-07-13
舰船科学技术(2022年10期)2022-06-17
成都信息工程大学学报(2021年5期)2021-12-30
西安邮电大学学报(2021年1期)2021-04-19
无线互联科技(2020年12期)2020-09-03
科学大观园(2019年10期)2019-09-10
演艺科技(2017年1期)2017-03-09
中国高新技术企业(2016年32期)2016-12-27
科技视界(2016年6期)2016-07-12
