转发式测轨系统地面设备时延测量方法
2019-01-29 05:17黄承强杨旭海李志刚李伟超
导航定位与授时 2019年1期
黄承强,杨旭海,3,成 璇,李志刚 ,李伟超 ,曹 芬
(1.中国科学院国家授时中心,西安 710600;2.中国科学院精密导航定位与定时技术重点实验室,西安 710600;3.中国科学院大学天文与空间科学学院,北京 100012)
0 引言
转发式卫星测轨方法是我国自主创新的高精度卫星测轨技术,被广泛应用于中国区域定位系统和其他C波段转发测距系统[1-3]。通过该技术,中国科学院国家授时中心建立了转发式卫星测轨系统,可以实现对地球同步轨道(Geosynchronous orbit,GEO)卫星的精密测定轨,目前该系统已成功支持GEO卫星轨道位置保持及快速恢复、卫通公司GEO卫星漂移控制、空间信号精度与性能评估、国家无线电干扰源探测等多个重大项目[1]。
对于转发式测轨系统,其测轨数据中包含地面设备时延误差、卫星转发器时延误差、对流层时延误差、电离层时延误差等多个测距系统误差[4-8],这都制约着GEO卫星的定轨精度。在卫星定轨解算中,通常认为卫星转发器时延变化很小,可将其作为待估参数与轨道参数一并求解[2];对流层时延误差可使用并址的IGS站解算对流层天顶延迟,然后通过映射函数投影至卫星方向,得到对流层延迟进行改正;电离层时延误差可以使用电离层网格模型进行改正[1];剩余的系统误差中地面设备时延是主要误差源。地面设备时延的精确测量是提高转发式卫星定轨精度以及导航定位服务性能的关键[9-10]。
转发式卫星测轨方法是在双向卫星时间频率传递(Two Way Satellite Time and Frequency Tr-ansfer,TWSTFT)技术的基础上提出的,在转发式测轨系统中,其地面站不仅可以实现对GEO卫星的精密测定轨,还可以实现高精度的卫星双向时间比对功能[11-13]。在TWSTFT系统中,对于地面设备时延,可以通过卫星模拟器、全球定位系统(Global Positioning System,GPS)校准和移动站等方法进行测量。卫星模拟器法由荷兰的G.D.Jong最早提出,是一种绝对时延测量方法。GPS校准和移动站是一种相对时延测量方法,要求用于测量的基准设备在搬移前后具有较高的时延稳定性[14-16]。本文在卫星模拟器法的基础上,设计了一种外环设备时延测量方法,用于测量转发式测轨系统地面设备时延,着重说明了该方法的基本原理和硬件实现,对测量结果进行了统计分析,在解算卫星轨道时,将测量结果用于改正地面设备时延误差,以便提高卫星定轨精度。
1 转发式卫星测轨原理
转发式卫星测轨方法的原理是将各地面站原子钟产生的高精度时间信号使用不同的伪码调制生成相同载波频率的伪码扩频信号,同时向同一颗卫星发射。经卫星转发后下发至各地面站,每个地面站接收所有站发射的时间信号,测定信号路径的时延,从而确定地面站到卫星之间的距离。信号的不同组合,形成不同模式的转发式卫星测轨观测方法。各站仅接收卫星转发自己站发射的信号,这种信号组合形成了自发自收模式观测方法;各站接收同一站发射的信号,这种组合形成了一发多收模式观测方法;多站发多站接收各站信号,这种组合形成了多发多收模式观测方法[3]。自发自收模式观测方法在转发式卫星测轨应用上比较成熟,目前也是转发式卫星测轨主用的观测模式。本文主要研究了自发自收模式下的转发式测轨系统地面设备时延测量方法。
图1所示为自发自收模式的转发式卫星测轨原理图。对于自发自收模式下的转发式卫星测轨,i站发射的信号经卫星转发后,被i站接收,则信号传递关系为:

图1 自发自收模式的转发式卫星测轨原理图Fig.1 Schematic diagram of satellite orbit observation for transfer ranging system in self-transmit self-receive mode
(1)


2 外环设备时延测量模型
2.1 外环设备时延测量原理
图2所示为外环设备时延测量原理图。在图2中,假设S1为卫星天线相位中心,S2为卫星模拟器天线相位中心,A为卫星模拟器底端在大天线主发射面上的投影点,B为地面大天线相位中心,O为大天线三轴交点,M为调制解调器。

图2 外环设备时延测量原理图Fig.2 Schematic diagram of outer loop equipment time delay measurement
定义发射设备时延起点为原子钟产生的时间信号到达调制解调器的时刻,终点为信号经大天线相位中心发射出去的时刻,则发射设备时延测量路径为M-O-B。定义接收设备时延起点为大天线相位中心接收到下行信号的时刻,终点为调制解调器解算出环路时延值的时刻,则接收设备时延测量路径为B-O-M。地面设备收发组合时延测量路径为M-O-B-B-O-M。
外环设备时延测量方法可用于测量地面设备收发组合时延,测量原理如下:在地面站大天线主发射面边缘装置一个卫星模拟器,用于模拟远距离的卫星,与地面站形成环路。地面站调制解调器输出的70MHz中频测距信号经上变频器变频为6GHz射频信号,通过功率放大器放大后经由大天线发出。卫星模拟器接收地面大天线发出的6GHz射频信号,并将该信号与其本振信号混频变为4GHz信号发射出去。地面大天线接收卫星模拟器发射的4GHz信号,经低噪声放大器放大和下变频器变频处理后,变为70MHz中频信号输入到调制解调器中,用于解算环路时延[2]。外环设备时延测量路径为M-O-B-A-S2-S2-A-B-O-M,外环设备时延测量值中包含地面设备收发组合时延。星地距离测量原理与外环设备时延测量原理类似,星地距离测量路径为M-O-B-A-S1-S1-A-B-O-M。
在进行定轨解算时,为了改正地面设备时延误差,将星地距离测量值扣除外环设备时延测量值,但是这样多扣除了卫星模拟器天线相位中心点S2到卫星模拟器底端在大天线主发射面上投影点A之间的路径时延以及卫星模拟器的转发时延。由于点S2到点A的距离是常量,卫星模拟器的转发时延变化很小,将多扣除的部分时延融合到卫星转发器时延的求解当中。
2.2 硬件实现
卫星模拟器是外环设备时延测量的核心设备,由天线模块和变频模块组成。天线模块包括一对圆极化收发天线,由振子完成信号的收发,由于地面站大天线为线极化,将卫星模拟器的天线设计成了圆极化以保证大天线转动到任意极化角处均能与卫星模拟器天线进行正常信号收发[17]。变频模块在收发天线之间,包括混频器、衰减器和滤波器,由地面站室内设备模拟转发器为混频器提供频率为2227MHz的本振信号,低通滤波器用来过滤2227MHz本振信号,高通滤波器用来过滤6GHz射频信号。图3所示为卫星模拟器部件框图,图4所示为卫星模拟器实物图。

图3 卫星模拟器部件框图Fig.3 Block diagram of satellite simulator components

图4 卫星模拟器实物图Fig.4 Picture of satellite simulator
卫星模拟器使用的本振信号频率为2227MHz,与常用的C波段通信卫星转发器使用的本振信号频率2225MHz相差2MHz。若地面站发射的上行信号频率为6047MHz,则地面站收到的下行信号中,频率为3822MHz的信号为卫星转发的信号,频率为3820MHz的信号为卫星模拟器转发的信号,通过不同的下行信号频率区分星地距离测量和外环时延测量。转发式测轨系统使用的调制解调器有1个发射通道和3个接收通道,在进行自发自收模式观测时,对于已精确标定3个接收通道时延差的调制解调器,可以设置第1个接收通道收卫星信号,第2个接收通道收卫星模拟器信号,这样便可实现星地距离和外环设备时延的实时测量,便于定轨解算时对地面设备时延误差进行改正。
3 测量结果及分析
2018年4月29日~31日,使用转发式测轨系统的西安站、喀什站、三亚站对亚太7号卫星进行连续自发自收观测。亚太7号卫星为亚太公司的GEO通信卫星,载有C频段和Ku频段转发器,星下点经度为东经76.5°。本次观测使用亚太7号卫星的C频段转发器,地面站大天线上行信号发射频率为6047MHz,调制解调器使用的扩频伪码速率为20MChip/s。
设置各地面站调制解调器第1个接收通道接收亚太7号卫星转发的信号进行星地距离测量,第2个接收通道接收卫星模拟器转发的信号进行外环设备时延测量。图5~图7所示分别为各地面站外环设备时延测量结果。

图5 西安站外环设备时延测量结果Fig.5 Results of outer loop equipment time delay measurement of Xi’an station
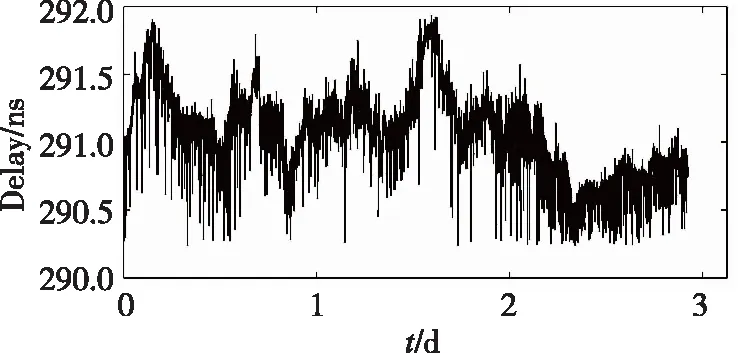
图6 喀什站外环设备时延测量结果Fig.6 Results of outer loop equipment time delay measurement of Kashgar station
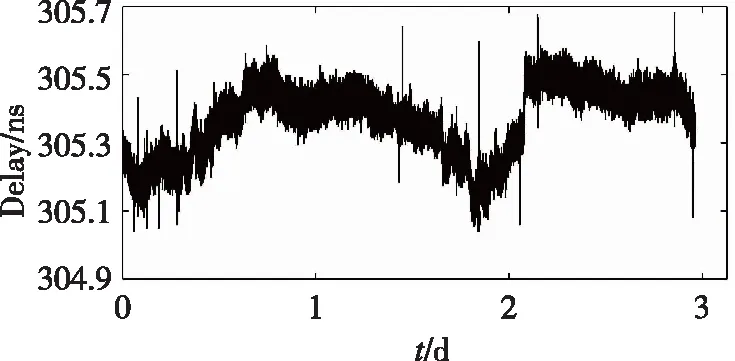
图7 三亚站外环设备时延测量结果Fig.7 Results of outer loop equipment time delay measurement of Sanya station
表1所示为各地面站外环设备时延测量值的统计结果,包括最大值、最小值、平均值以及标准差。
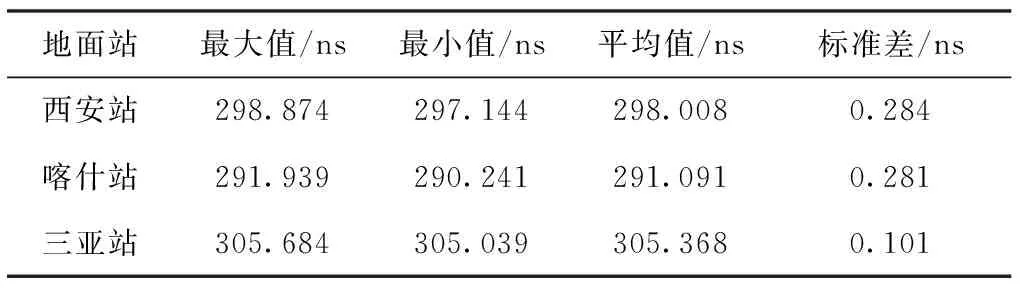
表1 各地面站外环设备时延测量值统计结果Tab.1 Statistical results of outer loop equipment time delay measurement of each ground station
由图5~图7和表1可知,各地面站外环设备时延测量值的标准差均小于0.3ns,测量得到的设备时延具有较高的稳定性。对比统计结果中的最大值和最小值可以看出,西安站、喀什站外环设备时延的波动范围(最大值减去最小值)比三亚站要大1ns左右,这主要是由环境温度变化引起,观测期间三亚站昼夜温差在7℃左右,喀什站和西安站昼夜温差在18℃左右。
卫星轨道重叠弧段是评估卫星轨道精度的重要指标,在计算重叠弧段时,使用1.5d数据进行定轨,第二个轨道在第一个轨道定轨时间的基础上向后滑动0.5d进行计算,然后对2个轨道中1d重叠的部分进行作差比较,统计轨道差的均方根(Root Mean Square,RMS)值作为该次定轨的轨道精度。图8所示为卫星轨道重叠弧段计算示意图。

图8 重叠弧段计算示意图Fig.8 Diagram of overlap arc calculation
进行卫星重叠弧段的轨道差解算时,若不扣除地面设备时延,每个地面站就相当于加入了几十米(300ns约90m)的误差,综合到卫星轨道上就会偏离几百米或几千米,所以必须要进行设备时延误差的改正。在计算亚太7号卫星重叠弧段的轨道差时,将以上地面站外环设备时延测量结果用于改正地面设备时延误差。
表2所示为亚太7号卫星重叠弧段轨道差的RMS值统计结果,分别包含径向、切向、法向和三维方向。
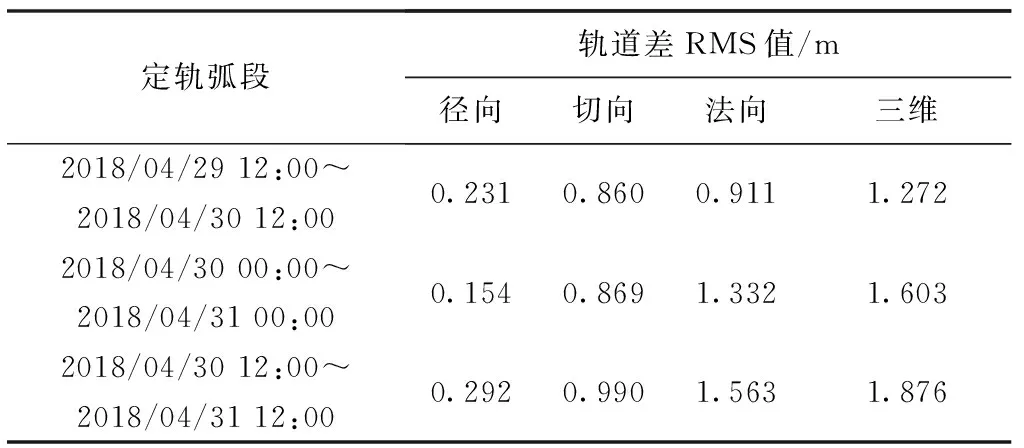
表2 亚太7号卫星重叠弧段轨道差RMS值统计结果Tab.2 RMS value statistical result of overlap arc orbit difference of satellite APSTAR-7
由表2可知,改正地面设备时延误差后的亚太7号卫星的重叠弧段轨道差RMS值能够优于2m。但亚太7号卫星在3个定轨弧段内法向轨道差RMS值差异较大,这主要是因为4月30日12:00(UTC)以后调制解调器解调的卫星信号载噪比较弱,星地距离观测资料不佳导致。
图9所示为2018年4月30日 12:00(UTC)~2018年4月31日12:00(UTC)期间亚太7号卫星重叠弧段的轨道差RMS值计算结果,其中DR、DT、DN和DP分别指重叠弧段轨道差的径向、切向、法向和三维方向。
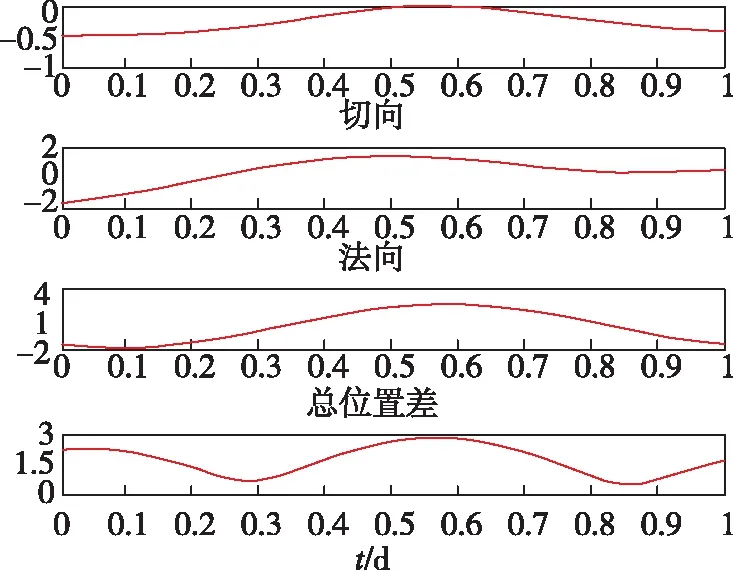
图9 重叠弧段的轨道差RMS值计算结果Fig.9 RMS value calculation result of overlap arc orbit difference
4 结论
1)转发式测轨系统包含多个测距系统误差,地面设备时延误差是其中主要的误差源,对其精确测量是提高转发式卫星定轨精度的关键;
2)本文在转发式卫星测轨原理的基础上,分析了自发自收模式下外环设备时延测量方法,使用该方法对转发式测轨系统地面设备时延进行测量,并将设备时延测量结果用于卫星定轨解算时的误差改正;
3)试验结果表明:测量得到的设备时延稳定度能够优于0.3ns(由标准差衡量),改正地面设备时延误差后的卫星重叠弧段的轨道差RMS值优于2m,地面设备时延的测量精度较高,对提高卫星定轨精度具有重要作用。同时,转发式测轨系统为转发式导航定位提供精密的卫星星历,卫星定轨精度的提高有助于导航定位性能的提升。
在试验过程中,发现温度变化对地面设备时延影响较大,后续将针对地面设备时延与环境温度之间的变化关系展开研究,采取有效的措施进一步减弱或避免环境温度变化对地面设备时延的影响,以提高地面设备时延的测量精度。
猜你喜欢
陕西画报(2022年9期)2022-11-01
汽车实用技术(2022年5期)2022-04-02
园林科技(2021年2期)2022-01-19
小哥白尼(趣味科学)(2021年6期)2021-11-02
电脑知识与技术(2021年22期)2021-09-14
电脑知识与技术(2021年22期)2021-09-14
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
花火B(2019年3期)2019-04-27
电子制作(2019年23期)2019-02-23