
基于改进型自抗扰控制的球杆系统位置控制
2019-01-27 12:46丁美玲刘丙友王力超
新乡学院学报 2018年12期
丁美玲,刘丙友,王力超
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
球杆系统是常用的研究现代控制理论和传统控制理论的非线性系统平台,也是验证控制策略和控制性能好坏的实验平台,它的非线性对于实际环境中的非线性分析具有重要意义。因此,关于球杆系统中小球的位置控制研究受到了广泛关注,PID控制、根轨迹控制和频率响应等方法经常用于球杆系统的研究。刘阳等[1]通过对球杆系统的建模和设计,把非线性球杆系统做了线性化处理。J.Sharma等[2]通过定量反馈理论(QFT)对球杆系统进行控制和跟踪。 Jo N.H.等[3]将非线性系统的状态观测器应用于球杆系统,提高了球杆系统的控制性能。 宋志伟等[4]、N.B.Hui等[5]和朱坚民等[6]分别用传统的PID控制、模糊PID控制和神经网络控制等控制策略研究了球杆系统。
自20世纪80年代以来,自抗扰控制已得到很大的发展,并在工业领域得到广泛的应用。陈增强等[7]介绍了自抗扰控制的基本思想、基本原理及其研究进展,指出了进一步研究的方向。王丽君等[8]把自抗扰控制器应用在永磁同步电机中,解决了永磁同步电机调速系统存在的超调与快速之间的矛盾。周凯等[9]把自抗扰控制器用于热连轧活套系统,消除了扰动对系统的影响。Zhang N.等[10]把自抗扰控制器用于无人机防撞系统,解决了传感器噪声、未知障碍加速度和风扰动下无人机避免碰撞问题。刘丙友等[11]将一种改进的自抗扰控制方法用于永磁同步电机转子位置角的控制,为转子的位置角控制系统设计了改进型扩张状态观测器和非线性误差反馈律,使得永磁同步电机的位置角控制得到了进一步优化。在本文中,我们运用拉格朗日运动学方程建立了球杆系统的数学模型,给出一种新型的非线性函数,基于该函数设计了一种控制球杆系统位置的改进型自抗扰控制器,设计了基于改进型自抗扰控制的球杆系统位置控制系统,并对该系统进行了仿真实验,验证了改进型ADRC控制器的抗干扰性和快速性。
1 球杆系统建模
球杆系统是一种典型的具有单输入输出的非线性系统,其结构简单紧凑、安全性较高、工作原理表达直观。球杆系统作为一个控制对象,已被广泛用于控制策略的研究。球杆系统虽然结构形式多样,但是原理基本相同。球杆系统的机械部分包括底座、横杆、小球、支撑部分、减速皮带轮和马达等,其结构如图1所示。
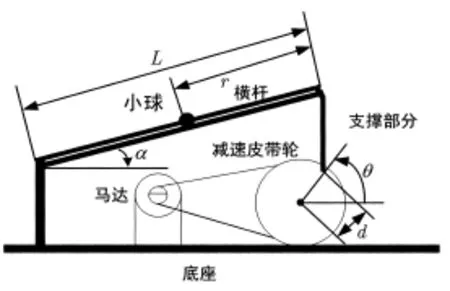
图1 球杆系统的原理图
从图1可以看出,小球在横杆上来回滚动,横杆的左端通过转轴固定,右端连接支撑杆可以绕固定点上下转动。球杆系统的基本控制思想是:通过直流伺服电机的转动带动皮带轮转动,再通过传动机构控制横杆倾斜角,以实现通过直流伺服电机转动位置角达到控制小球位置的目的。控制部分由计算机、增量式编码器、线性电阻传感器等组成。线性电阻传感器检测和反馈小球的实际位置,并和预期的目标位置进行比较,得到位置误差,然后经过控制器的精确控制,确定电动机的转角。直流伺服电机转动,带动减速皮带轮转动,改变连线(连杆和皮带轮的连接点与齿轮中心的连线)和水平线的夹角 θ ,进而改变横杆与水平线的夹角 α ,使小球达到预期的目标位置。
为了建立球杆系统的数学模型,作以下假设:1)小球在横杆上滚动时忽略小球与横杆之间的摩擦力;2)忽略电动机的力学特性,将电机模型看成一个纯比例增益k;3)忽略电机动力学和小球动力学的耦合作用;4)当 α 很小时,取利用拉格朗日运动学方程,建立球杆系统的数学模型

即


小球位置的模型结构如图2所示。

图2 小球位置的模型结构
2 自抗扰控制器
改进型自抗扰控制器由四个部分组成,分别是:跟踪微分器(tracking differentiator,TD)、扩张状态观测器(extended state observer,ESO)、非线性状态误差反馈控制律 (nonlinear state error feedback control low,NLSEF)和扰动补偿装置(disturbance compensation device,DCD)。
2.1 新型非线性函数设计
传统的非线性函数在原点是不可导的,且存在高频振颤现象,因此传统的自抗扰控制器的抗干扰能力较差,而在本文中我们给出的非线性函数为

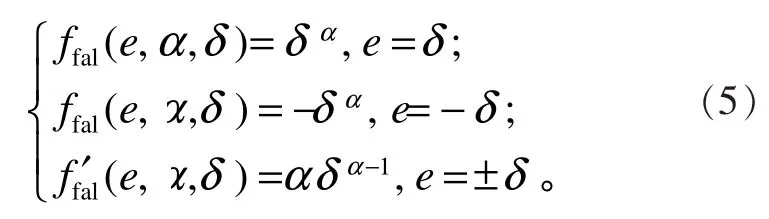
将式(5)代入式(4),求解可得


2.2 跟踪微分器(TD)设计
跟踪微分器不仅有跟踪输入信号、安排过渡过程的作用,还有微分和滤波的作用。跟踪微分器用来实现对系统输入信号的快速无超调跟踪,并能对其给出良好的微分信号

2.3 ESO设计
扩张状态观测器(ESO)用来观测内部状态和估计系统的不可测状态,实现模型和外部干扰的前馈补偿。
连续非线性扩张状态观测器的形式为

其中,e为观测误差,b0为补偿因子估计值,和α3为非线性因子,是ESO的增益。
2.4 NLSEF设计
NLSEF实现对跟踪微分器和扩张状态观测器的非线性组合,与扩张状态观测器检测综合扰动共同作为被控对象的控制量,用来提供稳定有效的输出信号

2.5 DCD设计
扰动补偿装置(DCD)用来补偿扰动,把系统转换成积分串联型的装置。球杆系统的补偿表达式为

2.6 球杆系统的改进型ADRC设计
把改进型ADRC应用于球杆系统的控制,相应的改进型自抗扰控制器的结构设计如图3所示。

图3 改进型ADRC的控制电路结构
3 仿真结果分析
为了验证改进型ADRC的控制效果,将改进的ADRC控制策略与PID控制策略、传统的ADRC控制策略进行比较,通过阶跃响应、正弦响应、方波响应和阶跃信号加入干扰的仿真结果进行比较,验证改进型ADRC具有更好的鲁棒性、抗干扰性、无超调和响应速度快的特性。在进行仿真实验时,我们为传统的ADRC和改进型的ADRC设置了相同的参数,具体的参数见表1。

表1 ADRC的参数
仿真实验的内容包括以下4个方面:
1)输入的信号为阶跃信号时,取信号为0.25 m,响应时间为5 s,可得如图4所示的响应曲线。
2)输入的信号为正弦信号时,取正弦周期为2 s,响应时间为10 s,波峰为0.3 m,波谷为0.1 m,可得如图5所示的响应曲线。
3)输入的信号为方波信号时,取周期为10 s的零正方波,正值为0.2 m,可得如图6所示的响应曲线。
4)输入的信号为方波信号时,取周期为10 s的零正方波,正值为0.2 m,同时加入强度为1 m的白噪声干扰信号,可得如图7所示的响应曲线。
从图4看,改进型ADRC的调节时间为0.434 s,传统的ADRC控制器的调节时间为0.849 s,PID的调节时间为2.265 s。可以看出,改进型ADRC比传统的ADRC的调节时间快大约1倍,比PID控制器的调节时间快了4.2倍,且ADRC控制器无超调。
分析图5和图6,可以得到相似的结论。
图7是白噪声干扰下的方波响应曲线。从图7可以看出,PID控制器在有干扰的情况下波动较大,传统的ADRC控制器同PID控制器相比波动有所改善,而改进型ADRC控制器在加入干扰后几乎无波动。
以上分析结果表明:改进型ADRC控制器与PID控制器相比,具有更强的抗干扰能力、更快的调节速度,并解决PID的超调问题;改进型ADRC与传统的ADRC相比,提高了响应速度和抗干扰的能力。

图4 阶跃响应曲线

图5 正弦响应曲线

图6 方波响应曲线

图7 白噪声干扰下的方波响应曲线
4 结论
球杆系统是开环上的非线性不稳定系统,为了使小球能够快速精准地到达指定位置,我们利用自抗扰控制器对小球的位置进行控制,并利用自抗扰控制技术解决了快速性和超调性之间的矛盾,保证了系统的抗干扰能力和鲁棒性。为了验证自抗扰控制策略的优良特性,在同样参数的条件下,我们通过仿真实验证明了改进型ADRC的良好特性,证明了改进型ADRC控制策略比传统的ADRC控制策略、PID控制策略具有更好的鲁棒性、快速性和抗干扰性,验证了改进型ADRC对球杆系统控制的可行性以及对非线性系统控制的可控性。
猜你喜欢
仪表技术与传感器(2022年6期)2022-07-27
一重技术(2021年5期)2022-01-18
北京航空航天大学学报(2021年9期)2021-11-02
太原科技大学学报(2019年3期)2019-08-05
中华建设(2019年3期)2019-07-24
浙江工商职业技术学院学报(2019年2期)2019-07-09
中国防伪报道(2017年4期)2017-06-15
电子制作(2017年20期)2017-04-26
轻兵器(2016年20期)2016-10-28
浙江大学学报(工学版)(2015年11期)2015-07-11
