
交互式多模型Kalman滤波算法的研究
2019-01-26 10:25杨佳义
科技创新与应用 2019年1期
杨佳义

摘 要:现代雷达在进行目标跟踪时常常采取卡尔曼滤波作为滤波方法,此种滤波方法只适用于单目标单一运动模型,对于高机动目标的预测结果往往不尽人意。因此文章针对高机动目标采用交互式多模型滤波方法。模拟三种运动方式,匀速,慢加速,快加速过程。采用三种不同运动模型对目标航迹进行滤波。并对真实航迹,观测航迹,滤波航迹进行对比,并对此种滤波方法进行性能分析。
关键词:卡尔曼滤波;交互式多模型算法;目标跟踪;马尔科夫过程
中图分类号:TP391.4 文献标志码:A 文章编号:2095-2945(2019)01-0030-02
Abstract: Kalman filter is often used as a filtering method in modern radar target tracking. This filtering method is only suitable for single target and single motion model. The prediction results of high maneuvering target are often unsatisfactory. Therefore, the interactive multiple model filtering method is used for high maneuvering targets in this paper. Simulation of three kinds of movement, i.e., uniform, slow acceleration, fast acceleration processes. Three different motion models are used to filter the target point trace. The real track, observed track and filtered track are compared, and the performance of this filtering method is analyzed.
Keywords: Kalman filter; interactive multiple model algorithm; target tracking; Markov process
1 概述
传统的卡尔曼滤波算法采用状态转移方程和观测方程,对目标进行动态估计。传统卡尔曼滤波不需要知道运动模型就可对目标的状态值进行修正。但是当目标突然进行机动(转弯,加速)等,传统卡尔曼滤波方法得到的结果往往差强人意。此时需要采用自适应算法。
而且单模型滤波算法需要先验设定模型,但是在目标机动能力较强时,目标的运动模型运动参数变化很大,单模型算法很难及时准确的辨识机动参数导致跟踪能力下降。
交互式多模型IMM是一种软切换算法,最初由
H.A.PBLom于1984年提出,目前在目标跟踪领域得到广泛应用。这种算法在多模型算法基础上,设定各个模型之间的转移满足已知转移概率的马尔科夫链,综合计算考虑多个模型交互作用得到更精确的状态估计。
2 交互式多模型Kalman濾波算法简介
2.1 先验信息
3 总结
交互式多模型算法输出结果其实就是多个模型的滤波结果的加权融合,简单来说其原理就是利用当前估计值的似然函数推导出当前滤波模型对当前运动状态的适配程度u,以及每个滤波模型的滤波估计值。
将两个值进行相乘,再将每个滤波模型遍历此过程,再将其相加。得到最终融合值。
4 仿真分析
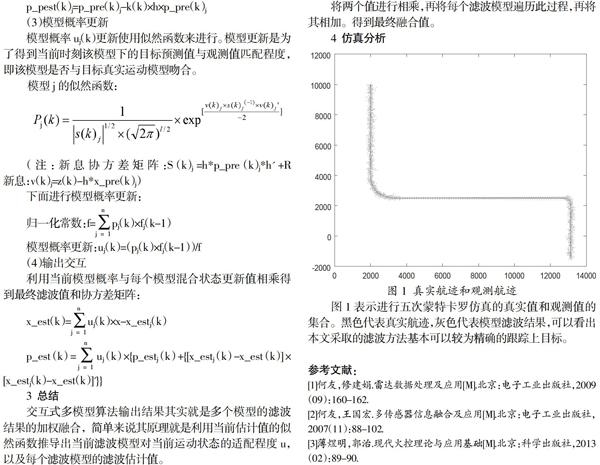
图1表示进行五次蒙特卡罗仿真的真实值和观测值的集合。黑色代表真实航迹,灰色代表模型滤波结果,可以看出本文采取的滤波方法基本可以较为精确的跟踪上目标。
参考文献:
[1]何友,修建娟.雷达数据处理及应用[M].北京:电子工业出版社,2009(09):160-162.
[2]何友,王国宏.多传感器信息融合及应用[M].北京:电子工业出版社,2007(11):88-102.
[3]薄煜明,郭治.现代火控理论与应用基础[M].北京:科学出版社,2013(02):89-90.
猜你喜欢
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
科技创新与应用(2016年36期)2017-02-21
电脑知识与技术(2016年27期)2016-12-15
航空兵器(2016年5期)2016-12-10
软件导刊(2016年9期)2016-11-07
科技视界(2016年14期)2016-06-08
电脑知识与技术(2016年2期)2016-03-22
科技视界(2016年5期)2016-02-22
哈尔滨理工大学学报(2015年5期)2016-01-19
