馈能型多模式悬架系统研究*
2019-01-24 06:30:12邓志君董铸荣李占玉梁松峰
深圳职业技术学院学报 2019年1期
邓志君,董铸荣, 2,彭 鹏,李占玉,梁松峰
馈能型多模式悬架系统研究*
邓志君1,董铸荣1, 2,彭 鹏1,李占玉1,梁松峰1
(1. 深圳职业技术学院 汽车与交通学院,广东 深圳 518055;2. 北京交通大学 机械与电子控制工程学院,北京 100044)
文章提出一种基于新型电磁力与液力混合型执行器的馈能型多模式悬架系统,建立了四分之一车辆馈能悬架系统及馈能电路模型,提出了节流阀可调减振器阻尼系数及馈能电路部分参数的计算方法以及采用天棚加地棚的半主动馈能控制策略.仿真结果表明:该控制策略可以改变悬架的舒适性、稳定性及馈能性.试验验证了选取的基本阻尼系数的合理性及仿真模型的准确性,为后续的参数优化及控制算法优化研究提供了基础.
馈能悬架;执行器;控制策略;建模仿真;试验
电磁馈能式主动悬架技术既能回收由不平路面激励引起的振动能量,实现有限能量源的充分利用,又能提高车辆尤其是非簧载质量较大的轮毂驱动电动汽车的平顺性、稳定性,已成为国内外的研究热点.电磁馈能主动悬架最关键的部件是电磁执行器.目前,电磁执行器在结构上可分为直线电机式[1-2]和“传动机构+旋转电机”式(包括:齿轮齿条+旋转电机式[3-4]、滚珠丝杠+旋转电机式[5-6]等).现有执行器存在以下缺点:1)满足车用的大功率执行器在大部分的行车路况下无法在高效区进行能量回收,效率低;2)执行器及其电控系统如果失效,车辆将丧失减振能力,带来安全问题;3)大功率执行器尺寸及质量大幅增加,给整车布置及节能带来新的难题;4)采用“传动机构+旋转电机”式的电磁执行器方案可靠性和耐久性较差.
本研究提出一种采用新型的电磁力与液力混合型执行器(EFA)的馈能型多模式悬架系统,并对悬架系统进行了建模,提出馈能悬架的半主动控制策略以及相关参数的计算方法,并进行了仿真及试验研究.
1 基于新型执行器的馈能型多模式悬架系统
新型的电磁力与液力混合型执行器(如图1所示),采用类似直线电机与节流阀可调减振器组合的结构特点,直线电机动子采用永磁体,其下端与活塞杆连成一体,活塞杆通过下连接销与车轮相连,直线电机定子内有三相绕组,直线电机定子与节流阀可调减振器的外壳连接,并通过上连接销与车体连接,位置传感器用于检测直线电机动子相对于直线电机定子的位置(也是车身与车轮的相对位移).执行器活塞上有常通的小节流孔,旁通管的流量由电动节流阀控制,电动节流阀的驱动部件可以是电磁阀或者是电机(本文采用了后者),ECU控制电动节流阀的开度,实现液力阻尼力调节.直线电机采用额定功率几百瓦级的电机,同时液力的减振能力也适当减小.ECU根据不同路况、车速或驾驶员选择的模式,对执行器进行多模式控制,见表1.
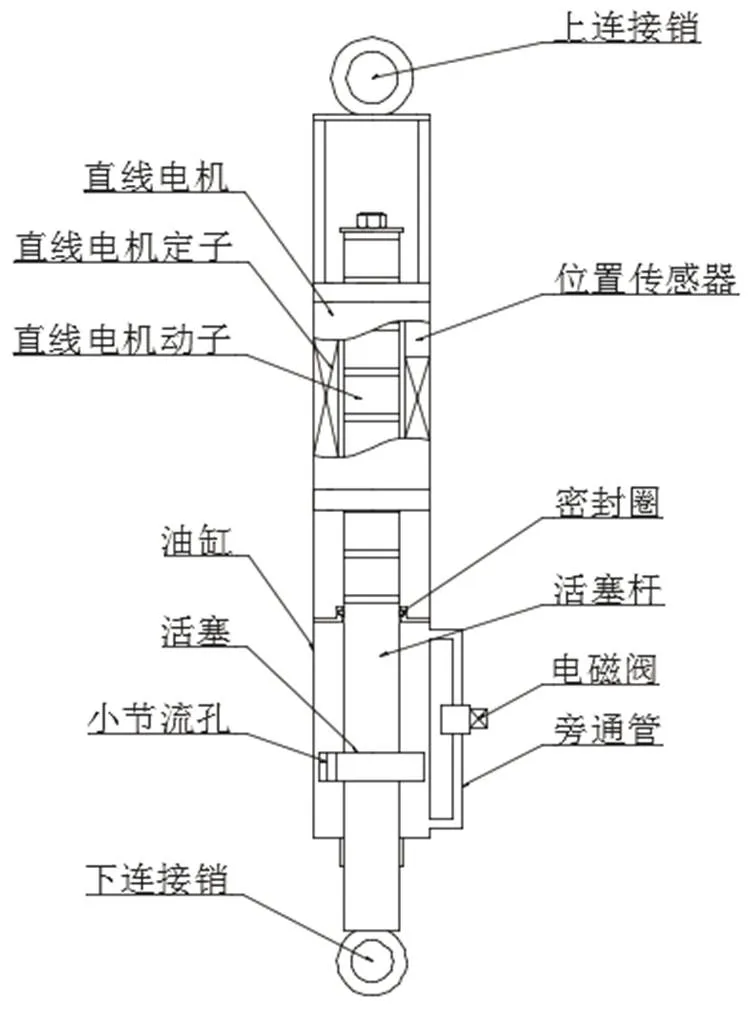
图1 电磁力与液力混合型执行器示意图
基于新型电磁力与液力混合型执行器的馈能多模式悬架系统,其结构框图如图2所示.它由试验台激振器、车身(簧上质量)、轮胎(簧下质量)、悬架弹簧、电磁力与液力混合型执行器、驱动及蓄能控制电路、控制单元ECU、各种传感器、数据采集系统、车载电源、数据显示器等组成.
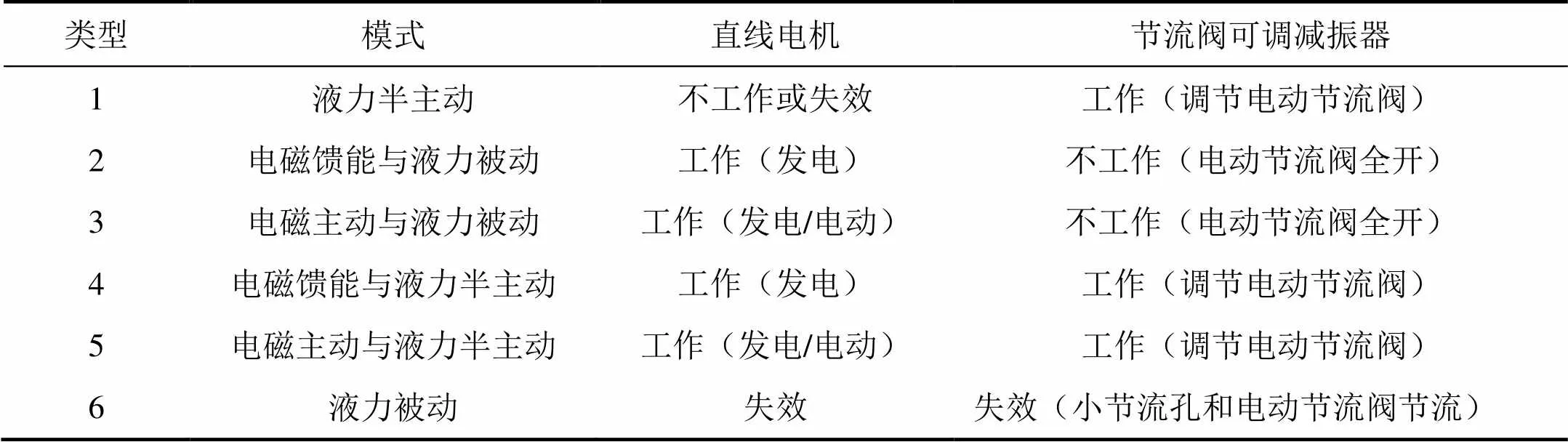
表1 悬架工作模式
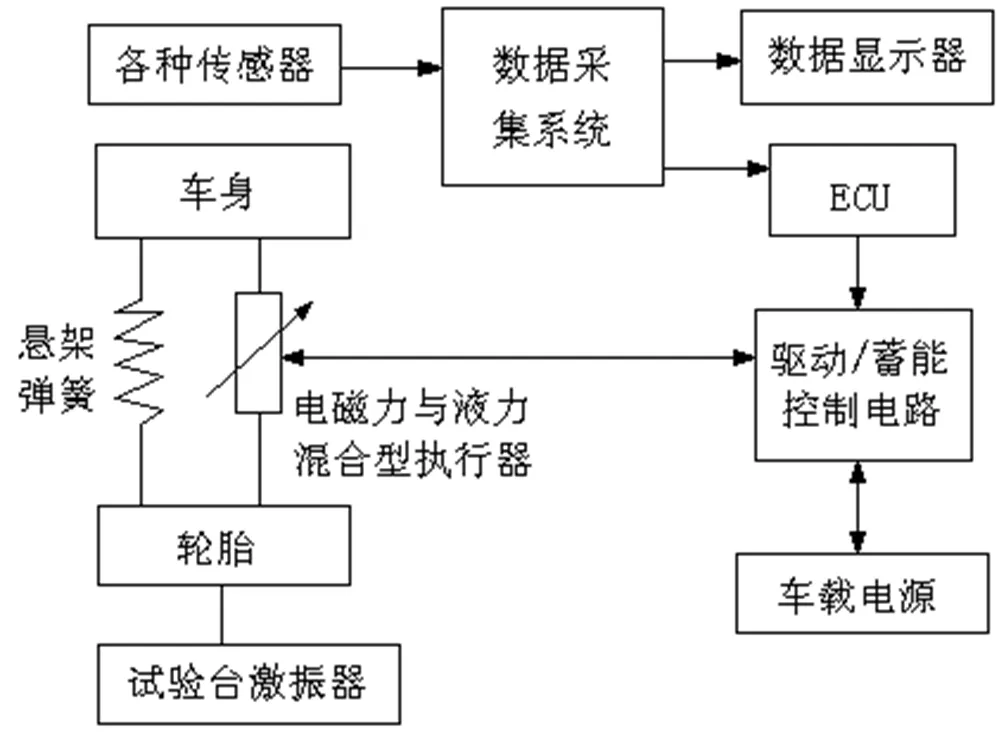
图2 馈能式多模式悬架系统结构框图
2 四分之一车辆馈能多模式悬架模型
基于电磁力与液力混合型执行器的四分之一车辆悬架可以简化为图3所示的模型,其中:b为车身重块质量(簧上质量);t为车轮质量(非簧载质量);为弹簧刚度;t为轮胎刚度;b,t,分别为车身、车轮、地面的垂直位移坐标,坐标原点选在各自的平衡位置;g为节流阀可调减振器的基本阻尼系数(最小阻尼系数);f为节流阀可调减振器的调节阻尼力;e为直线电机的电磁力.系统的运动方程为:

3 节流阀可调减振器阻尼系数
为了提高电磁力与液力混合型执行器的可靠性,希望在执行器的电磁力和液力调节功能均失效的情况下,执行器进入液力被动工作模式,并且仍然保持有足够的阻尼力,此时的阻尼系数为基本阻尼系数.我国有关标准规定:将车轮受激振动时对地面的最小动态载荷与静态接地力之比作为评价悬架系统特性的指标,并将此比值称为“吸收率”.根据规定,车辆的吸收率应不小于40%.在matlab/Simulink软件里建立普通悬架的仿真模型,路面的输入为振幅5mm的正弦周期振动,使振动频率从0增加到共振频率以上,在共振点过后(15Hz),振动频率减少,并再次通过共振点,模拟悬架的吸收率试验,并计算出悬架吸收率.
图4是在其他参数不变的情况下,阻尼系数与吸收率的关系曲线,随着阻尼系数增大,悬架的吸收率也增大,节流阀可调减振器的基本阻尼系数g取750 N·s/m,对应的吸收率为45%,满足悬架检测的要求.当阻尼系数为2650 N·s/m时,对应的吸收率为77.5%,此阻尼系数将作为节流阀可调减振器能达到的最大阻尼系数max,则其可调节的最大阻尼系数fmax为:
则各速度下能达到的最小阻尼力(基本阻尼力)g为:
其中,为车身与车轮的相对速度,也是下文提及的直线电机速度.
各速度下能达到的最大可调阻尼力fmax为:
4 直线电机及其馈能电路建模及特性分析
4.1 直线电机及其馈能电路模型
本论文只考虑电磁力与液力混合型执行器的直线电机在发电状态下的阻尼及能量回收情况,即把直线电机作为发电机,将直线电机的三相电枢绕组等效为3个电感线圈,忽略绕组间的互感,永磁体所产生的感应电动势用理想正弦电压源来表示,将电机发出的电经二极管全波整流桥整流后,由馈能调节电路(Boost变换器)调节馈能回路电流,从而调节电磁阻尼力,同时将电能升压存储到超级电容SC,建立如图5所示的电路模型.其中:a、b、c分别为各相感应电动势;a、b、c分别为各相端电压;n为中性点电压;a、b、c分别为各相电流;a、b、c分别为各绕组电阻;a、b、c分别为各绕组电感;VT是Boost变换器中控制电路通断的MOS管;dc是储能电感.
采用Boost变换器对整流后的电能进行升压,减少充电“死区”现象[7].当VT闭合时,超级电容SC短路,电能被暂存至储能电感dc中;当VT断开时,储能电感产生高于超级电容的电压,与经整理的输入电压一起给超级电容充电.
在matlab/Simulink软件里,将直线电机的速度及位置信号作为输入,结合电机的反电势系数e及相位差,计算各相的感应电动势,在Simulink/simpowersystems里,将各相的感应电动势作为受控电压源,构建直线电机及其馈能电路仿真模型.
直线电机产生的电磁阻尼力为:
4.2 馈能回路性能参数计算
对图5的直线电机及其馈能电路进一步简化成图6所示的等效电路.当VT导通时,此时电路满足式(6):
当VT关断时,电路满足式(7):
其中,z为经整流器整流后的输出端电压;c为超级电容端电压;d为二极管压降;eq、eq分别是储能电感与电机绕组的等效电阻值及电感值;为电流的瞬时值.
由式(6)、(7)可得电机绕组中的稳态电流值为:
其中为一个开关周期内开关信号的占空比.
如直线电机整流后的等效反电动势为ez,则
直线电机产生的电磁阻尼力可表示为:

当D=1时,得出直线电机在速度时产生的最大电磁阻尼力:
直线电机在速度时产生的最小电磁阻尼力为:
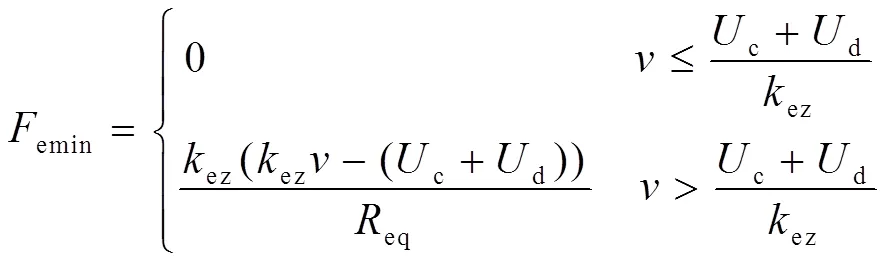
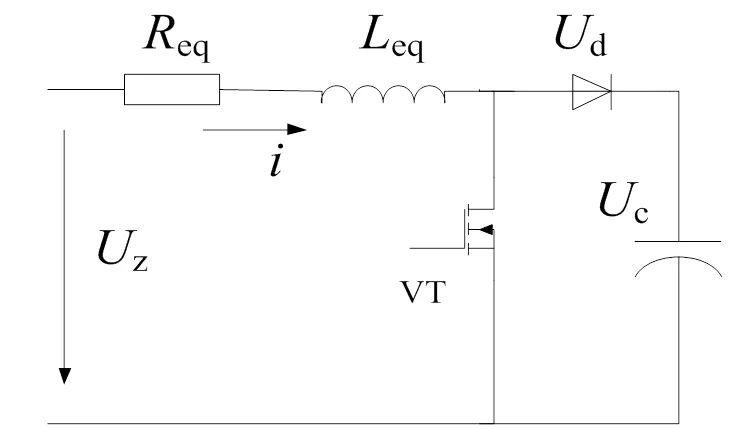
图6 馈能等效电路
Boost变换器输出最大功率,即此状态下产生最大回收功率:
对应的电磁阻尼力为:
5 馈能悬架半主动控制策略
馈能悬架采用天棚加地棚的半主动控制策略[8,9].天棚地棚控制策略的可控阻尼力可表示为:

由天棚地棚控制策略确定的可控阻尼力作为参考阻尼力,再根据分配策略分配给节流阀可调减振器和直线电机来调节,液力阻尼力与电磁阻尼力分配策略如图7所示.如果参考阻尼力ref大于此速度下节流阀可调减振器能调节到的最大阻尼力fmax,则将节流阀可调减振器的调节阻尼力f分配为fmax,剩余的阻尼力(ref-fmax)由直线电机产生的电磁力e完成,如果剩余的阻尼力超过直线电机在此速度下能产生的最大电磁力emax,则直线电机将按emax的目标调节.如果ref小于或等于fmax,先满足电磁力e分配需求,即馈能需求,如果ref大于直线电机在此状态下能产生最大回收功率所对应的电磁力rmax,则电磁力直线电机将按rmax的目标调节,剩余的阻尼力目标由节流阀可调减振器来调节.如果ref小于或等于rmax,则直线电机将按ref的目标调节,节流阀可调减振器保持最小阻尼力.
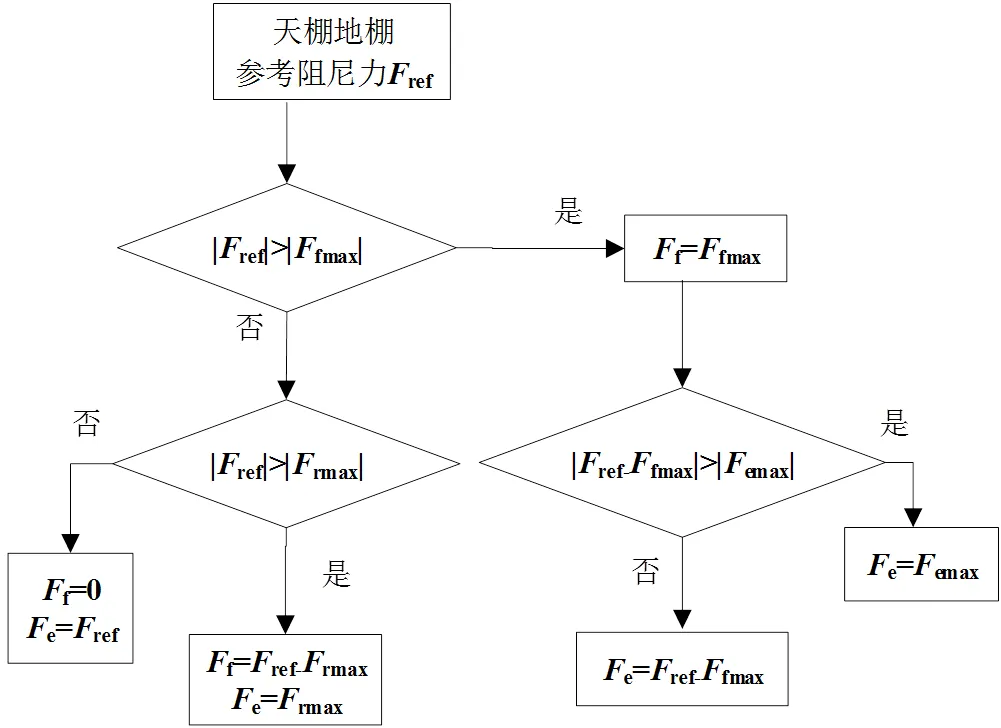
图7 电磁阻尼力与液力阻尼力分配流程图
6 仿真与试验
6.1 馈能悬架仿真计算与分析
在matlab/Simulink软件里构建如图8所示的四分之一车辆馈能悬架仿真模型,选用一个滤波白噪声作为路面输入模型[10],即:

式中:00为下截止空间频率,0为参考空间频率;q为路面不平度系数;为车辆前进速度;()为均值为零的高斯白噪声.
四分之一车辆模型的输出为车身速度和车轮速度及其相对速度,悬架控制策略模块根据车辆的状态参数,确定参考电磁阻尼力及参考液力阻尼力分配给直线电机及节流阀可调减振器模块执行,各自产生的实际阻尼力同时作用到车辆.通过仿真能计算出所需的状态参数,如:车身加速度均方根、车轮动载荷均方根、悬架动挠度均方根、超级电容的回收能量等.四分之一车辆馈能悬架部分技术参数见表2.
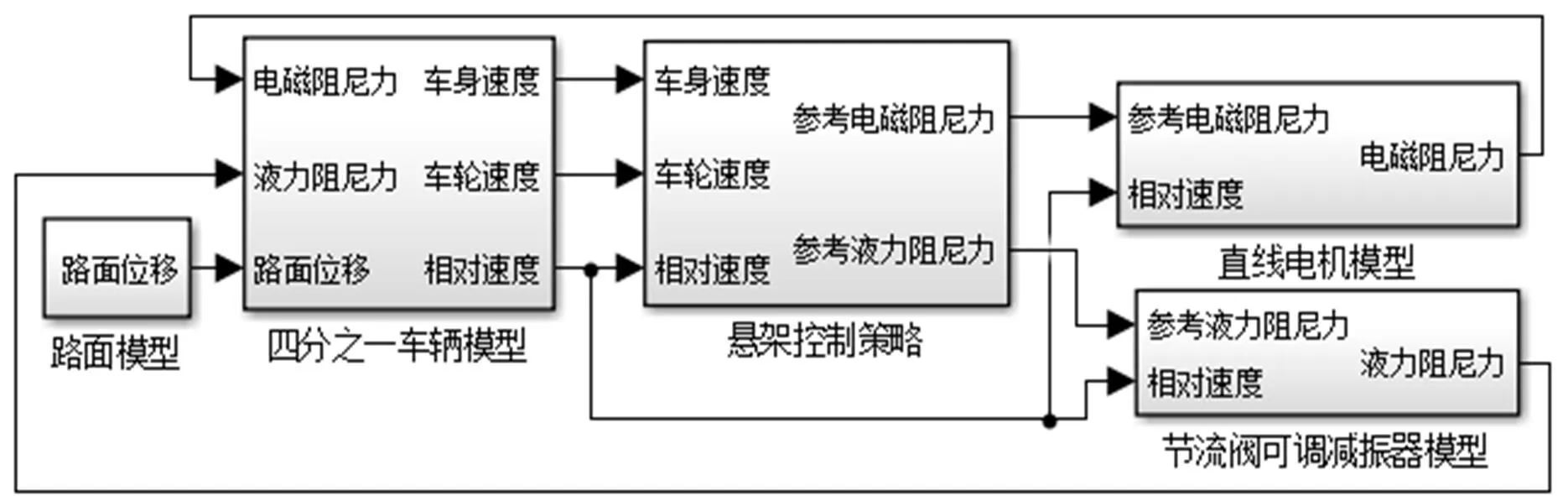
图8 四分之一车辆馈能悬架仿真模型
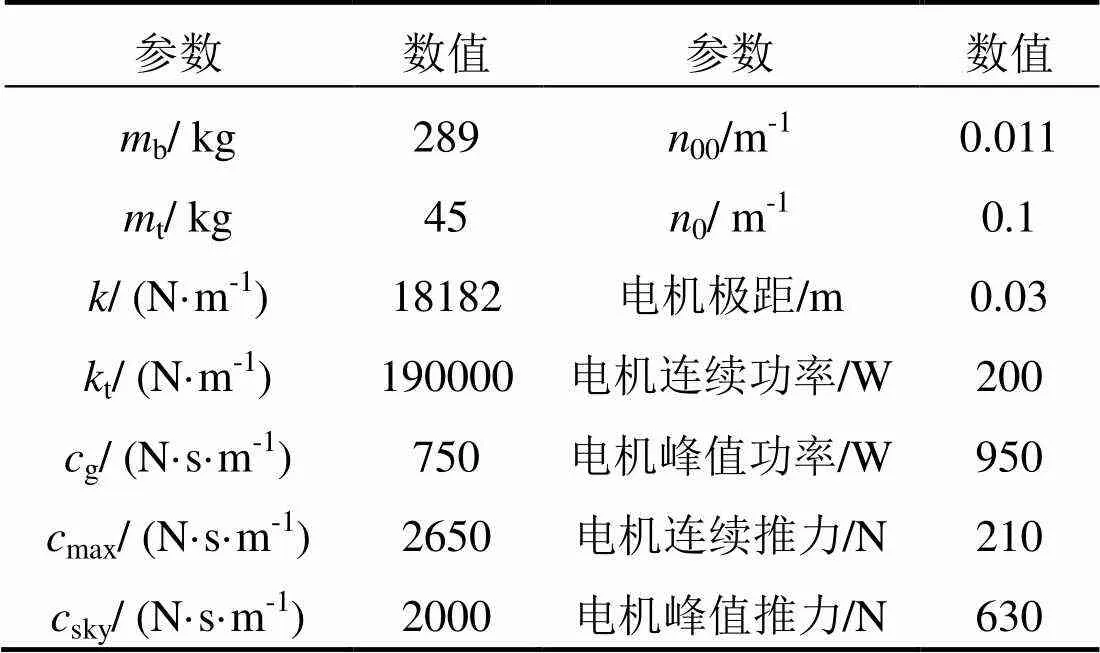
表2 馈能悬架的技术参数

仿真结果还表明:车速越高、路况越差,能量回馈效果越显著.由于直线电机相对于整个执行器的功率偏小,所以回馈的总能量不高,悬架振动的大部分能量被节流阀可调减振器消耗掉了,所以还可以通过提高直线电机的连续功率来提高回馈的能量.

表3 C级路面仿真计算结果
6.2 试验与分析
设计研制的电磁力与液力混合型执行器的节流阀可调减振器样机与直线电机样机,以及四分之一车辆馈能悬架振动测试系统如图9所示.馈能悬架振动测试系统的悬架激振器采用课题组自主研发的基于多连杆机构运动原理的机械激振器[11].馈能悬架采用了螺旋弹簧,同时保留了悬架的车轮总成.基于Labview开发了测试系统的数据采集系统.
利用馈能悬架振动测试系统对悬架进行基本阻尼系数下的吸收率试验,节流阀可调减振器的阻尼系数g经测试近似为730 N·s/m,对应的吸收率为51%(如图10所示),满足悬架检测的要求.
另外对馈能悬架开展了频率为3Hz,幅值为0.011m的正弦路面输入下馈能悬架的控制响应试验,节流阀可调减振器调节为基本阻尼系数g(取730 N·s/m),按式(13)的关系控制电磁阻尼力,测试系统的响应及能量回收情况.选取其中前10秒的试验结果和仿真结果进行比较,表4是悬架响应的均方根值、能量耗散及能量回收的试验及仿真结果.仿真结果与试验结果基本一致,验证了仿真模型的准确性,为后续的参数优化及控制算法优化研究提供了基础.

表4 正弦路面输入试验及仿真结果
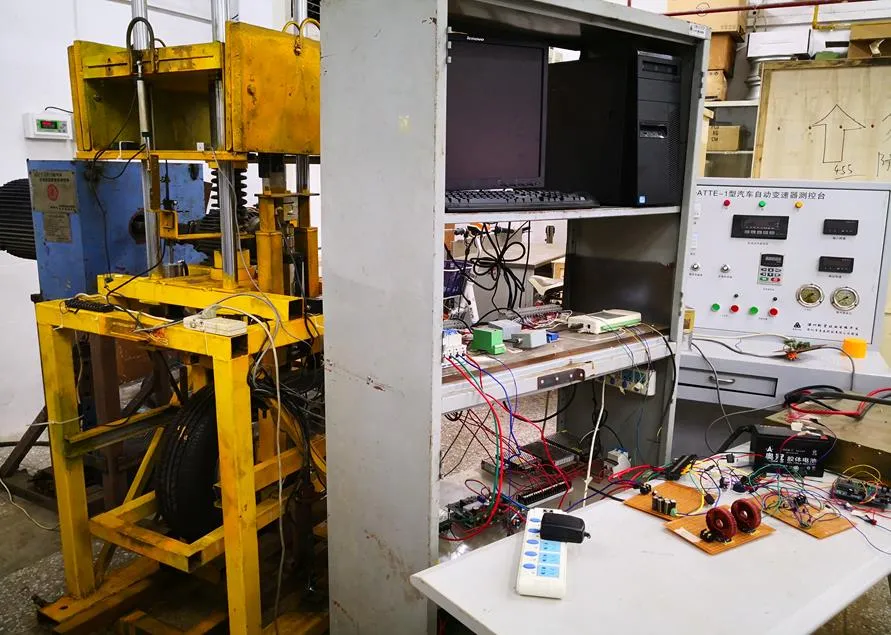
图9 馈能悬架振动测试系统
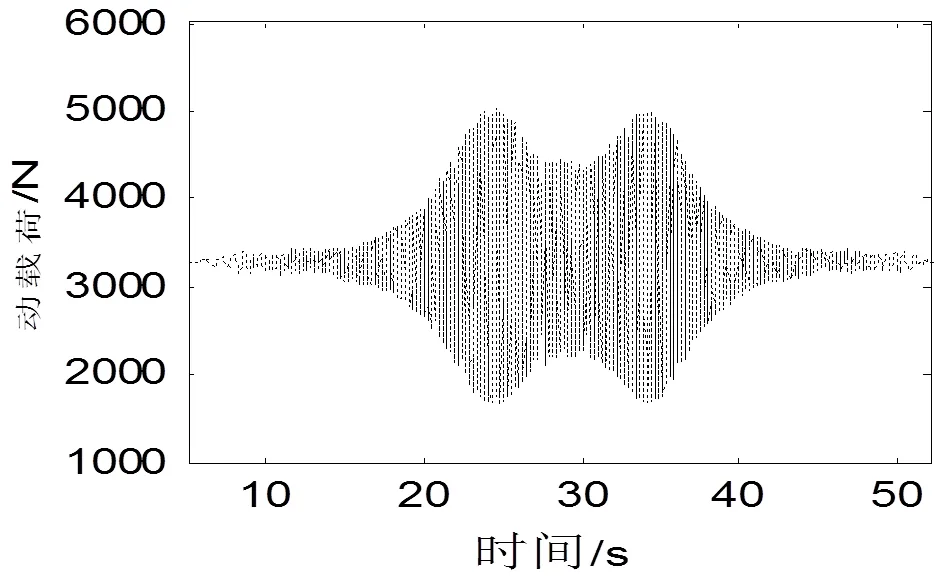
图10 车轮对地动态载荷与时间的关系
[1] Bart L J, Gysen van der Sande Tom P J, Paulides Johannes J H. Efficiency of a regenerative direct-drive electromagnetic active suspension[J]., 2011,60(4):1384-1393.
[2] 王艳阳.基于轮边驱动电动车的馈能型悬架综合性能研究[D].重庆:重庆大学,2014.
[3] Weeks D A, Bresie D A, Beno J H,et al. The Design of an Electromagnetic Linear Actuator for an Active Suspension[C]//SAE International Congress and Exposition, 1999-01-0730,1999.
[4] 于长淼,王伟华,王庆年.电磁馈能式悬架方案设计与节能分析[J].汽车技术,2010(2):21-25.
[5] 刘松山.电磁馈能悬架阻尼特性研究[D].长春:吉林大学,2013.
[6] 黄昆,喻凡,张勇超.基于能量流动分析的电磁式馈能型主动悬架控制[J].上海交通大学学报,2011,45(7):1068-1073.
[7] 汪若尘,焦宇,钱金刚,等.混合悬架半主动控制器设计与试验[J].农业机械学报,2017,48(6):334-340.
[8] 李锐,余淼,陈伟民,等.基于磁流变减振器的汽车悬架振动控制[J].机械工程学报,2005,41(6):128-132.
[9] 郭孔辉,王金珠,郭耀华,等.基于混合阻尼控制的车辆半主动悬架可调性研究[J].汽车技术,2013(3): 1-5.
[10] 陈杰平,陈无畏,祝辉,等.基于Matlab/Simulink 的随机路面建模与不平度仿真[J].农业机械学报,2010,41(3):11-15.
[11] 邓志君,任少云,梁松峰,等.汽车电磁馈能主动悬架试验台设计和研究[J].机械设计,2017,34(9):85-90.
Research on Multi-patterns Energy Regenerative Suspension
DENG Zhijun1, DONG Zhurong1, 2, PENG Peng1, LI Zhanyu1, LIANG Songfeng1
()
A multi-pattern energy regenerative suspension has been presented based on a new electro-hydraulic actuator. 1/4 vehicle energy regenerative suspension system and energy regenerative circuit were built up. A new method is introduced to calculate the energy regenerative circuit parameters and damping coefficient of the absorber, whose throttle aperture is adjustable. This paper also presents a semi-active energy regenerative control strategy by using sky-hook and ground-hook. The simulation results show that the control strategy can change the comfort, stability and energy regenerative ability of suspension. The electro-hydraulic actuator and 1/4 vehicle energy regenerative suspension system has been made. The rationality of the selected basic damping coefficient is verified by the test. The accuracy of the simulation model is verified as well, so that it can be the basic for parameter optimization and control strategy optimization research.
energy regenerative suspension; electro-hydraulic actuator; control strategy; system modeling and simulation; test
2018-10-15
2016深圳市基础研究项目(JCYJ20160525110851132);2016广东省自然基金项目(2016A030313024);2016深圳市基础研究资助项目(JCYJ20160525110808894)
邓志君(1979-),男,广东河源人,副教授,硕士,主要研究领域为电动汽车及汽车底盘设计.
10.13899/j.cnki.szptxb.2019.01.001
U463.33
A
1672-0318(2019)01-0003-07
猜你喜欢
郑州大学学报(工学版)(2023年6期)2023-10-26 08:35:28
疯狂英语·初中天地(2022年9期)2022-08-29 13:58:34
池州学院学报(2022年3期)2022-08-11 05:34:12
电子测试(2021年23期)2022-01-22 09:23:56
防爆电机(2021年5期)2021-11-04 08:16:30
北京理工大学学报(2020年11期)2020-12-15 04:55:50
湖北农机化(2020年4期)2020-07-24 09:07:42
现代机械(2018年1期)2018-04-17 07:29:36
中国学术期刊文摘(2016年2期)2016-02-13 16:01:41
石家庄理工职业学院学术研究(2014年4期)2014-04-27 14:14:42