
高动态场景下频率估计器的设计与实现*
2019-01-23 11:49苏泳涛
通信技术 2019年1期
税 敏 , 苏泳涛 , , 曹 欢,,4
(1.重庆邮电大学通信与信息工程学院,重庆 400065;2.中国科学院计算技术研究所无线通信技术研究中心,北京 100190;3.移动计算与新型终端北京市重点实验室,北京 100190;4.中国科学院大学,北京 100190)
0 引 言
新的5G标准中,提出了随时、随地接入的概念,拟引入卫星网络对各个地区进行覆盖。卫星常分为高轨、中轨和低轨卫星。高轨卫星与地面处于相对静止状态,其本身运动造成的多普勒频移较小。但是,当用户包含高铁、飞机等高速运动的物体时,它的相对运动造成的多普勒频偏为104~105Hz。不同于高轨卫星,中轨和低轨卫星由于本身的高速运动会造成较大的多普勒频移,若地面终端也是高速运动的终端,那么在卫星通信过程中,信号经信道传输时,会因高速运动造成较大的频偏和相移,使得信号到达接收端无法正常解调和译码。尤其是低轨卫星,移动速度非常快,自身造成的多普勒频移为105~106Hz[1]。将这种处于相对高速运动的状态,简称“高动态”。高动态场景下,多普勒频移不仅大,还因径向速度和加速度随时间不断的变化,而呈现高阶时变特性[2-3]。因此,在进行正常通信前,必须对接收的信号进行估计与补偿,才能有效恢复原始的基带信号,保证可靠的通信。
高动态场景下的载波频偏主要是多普勒频偏。时域经典的频偏估计算法包括M&M算法[4]、Kay算法[5]和L&W算法[6]。理论上均具有超过0.2倍符号速率的估计范围,但均达不到解调译码所需精度。L&R算法[7]和Fitz[8]算法精度较高,但是估计范围小。文献[9-10]设计了一种采用M&M算法、L&R算法和细估计算法级联的频率估计器,使频偏从符号速率的20%逐级收敛。该方法级联次数较多,因此实现复杂度较高。文献[11]采用频率误差检测算法和L&R算法级联完成频偏估计,存在精度和复杂度不可兼得的问题。文献[12]设计了一种采用类M&M算法和ML估计算法实现信号的频率捕获,需要多次运用复数相乘和复数相加,计算复杂度高。
针对高动态场景的特点和以上频率估计器计算复杂度高、频偏捕获范围小、估计精度低等缺点,本文设计了一种高动态场景下的频率估计器,提出了优化后的多级级联频偏估计算法。基于最佳符号间隔理论优化粗估计算法复杂度,利用Kay算法思想扩大了细估计算法的估计范围。
1 系统架构和模型描述
1.1 系统架构描述
卫星通信系统架构如图1所示,包括空间段、地面段和用户端。空间段由一个或多个卫星组成,作为通信中继站,主要起透明转发、星上处理等作用。地面段通常由核心网、地面网络控制中心和信关站组成,主要起资源分配,波束、频谱管理,卫星姿态监控等管理和控制的作用。用户段由用户终端组成。其中,卫星速度根据轨道高度[13],通过开普勒第三定律计算所得。用户终端速度常见数值,如波音747飞机约940 km/h,普通高铁约300 km/h,快艇速度约60 km/h。
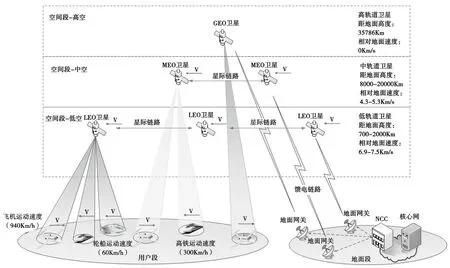
图1 高动态卫星网络架构
多普勒频移主要是由卫星和用户终端的相对运动引起。多普勒频移的表达式可表示为:

其中,fd是多普勒频移,f是载波频率(本文f采用Ka频段频率30 GHz),Vd是卫星与用户终端间的径向相对速度,c是光速。由式(1)和网络中各网元的属性参数可计算出表1数据。

表1 不同场景下多普勒频移参数
根据表1可以看出,低轨的多普勒问题最严重,本文研究重点关注低轨中典型场景的频谱估计。宽带卫星通信频段采用Ka频段(20~40 GHz),不同场景下多普勒频移参数大致如表1所示。在飞机场景下,若采用低轨卫星作为通信中继站,则多普勒频移是载体和卫星的叠加,717.5~777.4 kHz。高动态场景下,多普勒频移不仅大,还存在高阶变化率,仅飞机多普勒漂移达到1 700 Hz/s。为保证接收到的信号能正确解调和译码,在此之前需完成信号的估计和补偿。显然,高动态场景下的频偏估计和补偿最突出。
1.2 信号通信模型
一个完整的数字通信系统由发射机、空口信道和接收机三大部分组成,如图2所示。

图2 数字通信系统
信号到达接收端经下变频、匹配滤波后完成同步。高动态场景下,定时同步和帧同步已取得显著成果,本文只针对载波同步中频率估计进行研究。定时同步和帧同步后,对信号经过提取,此时信号可以表示为:

其中A是信号幅度,本文取A=1,s(k)是经相位调制后的第k个调制符号,T是符号周期,φ(kT)是由收发两端载波频率带来的误差,n(k)是复高斯白噪声。
由于接收信号中的调制信息具有与本地调制信息共轭相乘等于1的特点,即s(k)s*(k)=1。因此,表达式(1)可转化为:

在高动态场景下,频偏具有高阶变化率。通过泰勒级数对φ(kT)进行展开,在忽略3阶以上项时,可得到:

其中θ是初始相位,fd是多普勒频移,f1、f2是频偏的一阶、二阶变化率。本文暂不研究对变化率的估计,因此变化率造成的频偏以扰动δ的形式体现,即:

设初始相位为0,且将噪声部分作近似处理,可将表达式(3)转化为:

1.3 系统帧结构
本文研究关注于宽带多媒体业务,而DVBS2X协议[14]是常用的宽带多媒体协议,因此本文基于此展开分析。DVB-S2X协议下行物理层帧结构如图3所示。其中,帧头包含SOF(26个符号)和PLS(64个符号)两部分。PLS包含两个信息字段MODCOD和TYPE字段,共7个符号。MODCOD段(5个符号)用于识别复序列前向纠错帧的调制方式和FEC的码率。TYPE段(2个符号)用于识别FEC的长度,并表明有无导频(pilots)。物理层帧中每16个时隙后跟一段导频,每个时隙90个符号,每段导频长度为36个符号,导频和帧头主要用于接收端同步处理。由于不同的调制方式,每帧数据含有的导频段数不同。例如:BPSK调制一帧数据含有11段导频,QPSK调制一帧数据含有5段导频。在辅助数据严重受限的情况下,如何充分利用帧头和导频,使接收端快速高效地实现同步成为该领域的一种挑战。
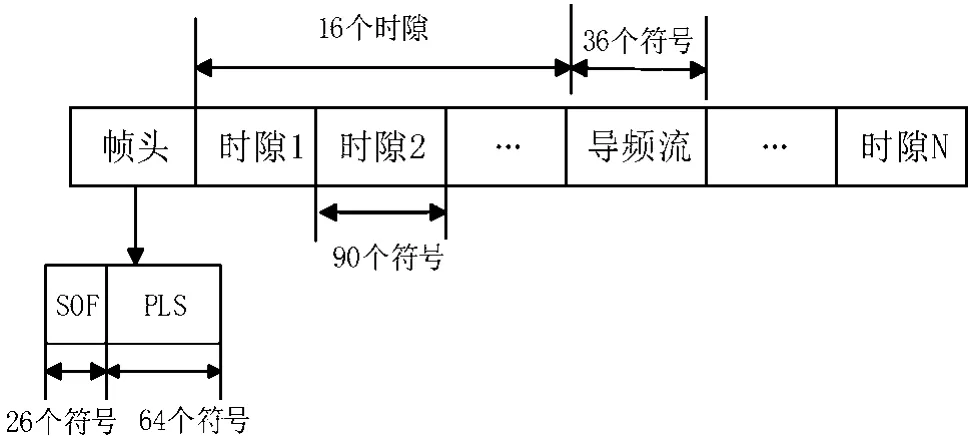
图3 DVB-S2X系统下行物理层帧结构
2 估计器和级联算法的设计
2.1 频率估计器的设计
频率估计器的设计如图4所示。接收端的同步包括定时同步、帧同步和载波同步。载波同步又分为频率捕获和相位跟踪。在帧同步阶段,利用本地序列对SOF和PLS做移位相关。将相关器的输出分成N个长度为L(L取值至少大于1帧数据长度)的搜索窗进行峰值搜索,每段中必定存在一个最大峰值并作为候选。对第一个候选进行PLS解码,推导出下一个SOF和PLS的位置。若推导的位置上SOF和PLS相关性足够强,则帧同步成功;否则,继续对下一个候选进行处理。帧同步后,已知帧头和导频的位置,此时可将其用于辅助载波同步。高动态场景下,多普勒频偏较大,采用一步频率估计算法较难达到相位跟踪所能接受的频偏门限。结合文献[9-12]的思想,将频率估计分两步实现,即粗估计模块得到初始频偏,并通过前馈结构实现频点调整;细估计模块进一步细化估计以获得更高的精度。高动态环境下,多普勒频移具有高阶变化率。细估计模块不仅要估计小频偏,还需估计变化率。
2.2 多级级联算法设计
2.2.1 粗估计算法设计
文献[12]指出,粗估计至少需要20帧才能将频偏从20%减少到10-4。该算法在对接收序列求相关并进行累加得到累加相关函数时,需要多次复数共轭相乘和复数相加,计算复杂度较高。根据辐角的 范 围 -π<2πLTΔf<π, 可 知 频 偏 的 范 围 为其中,f为符号速率,L是符号间的间隔。经探索发现,L取值越大,越能平滑噪声的影响,从而算法估计精度越高,但是估计范围也相应减小。因此,可以根据不同场景,选取不同的L值,以获得更高的估计精度。DVB-S2X协议指出,总频偏可能达到符号速率的20%,因此符号间间隔最大可取2。
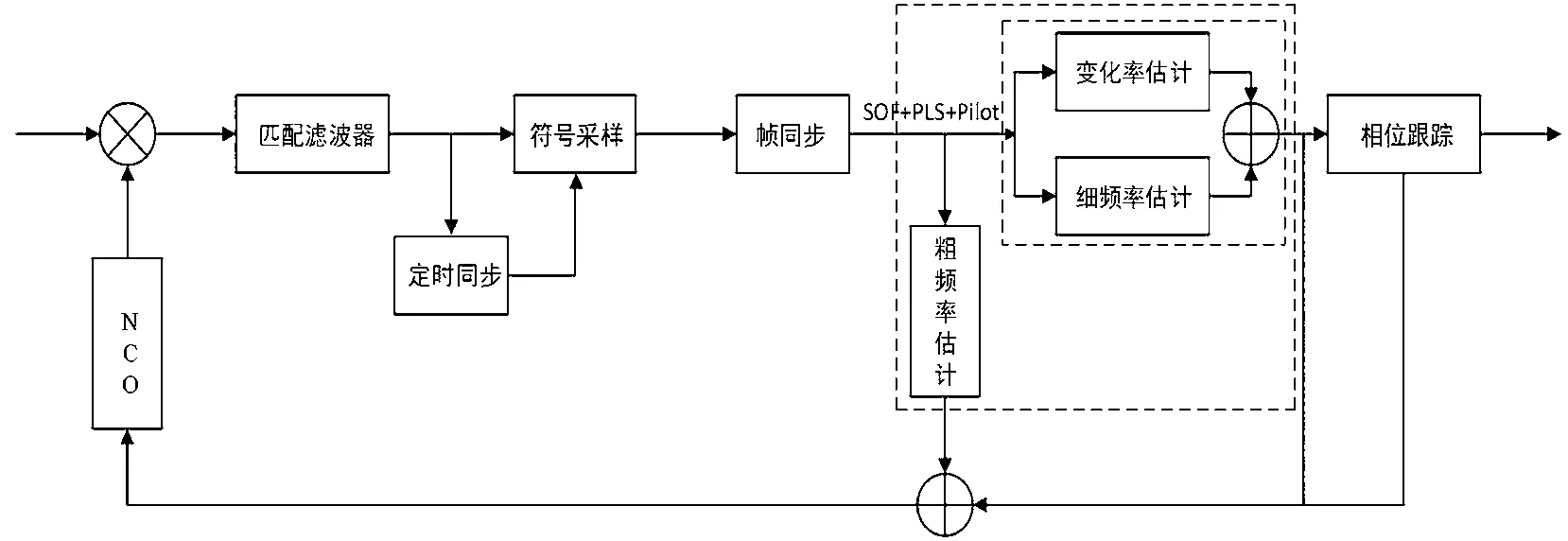
图4 频率估计器的设计
根据L最大取值2的理论分析,可将相邻数据求和并看作一个整体。基于此思想,可对文献[12]中算法进行优化。优化的算法步骤如下:
(1)每两个符号求和且看作一个整体:

其中,Ns表述每段辅助数据长度,帧头Ns=90,导频Ns=36,[ ]表示取整。
(2)对c(k)序列中各符号求相关,得到相关序列:

(3)将S段相关序列求和,得到累积相关序列:

(4)求解频偏:

辐角差Δm和权重因子wm分别为:
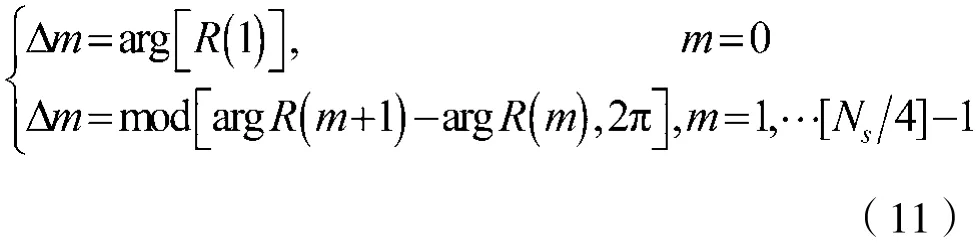
其中,arg[]表示求辐角。
2.2.2 细估计算法设计
经过粗估计与补偿后,无法预知此时的频偏为正值还是负值,而ML估计算法[12]无法高精度对0 Hz以下的频偏进行估计,具有一定的局限性。在工程实现时,需要改进ML估计算法使其与粗估计算法级联,实现频偏收敛。
将每一段导频块求和后看作一个整体,表达式为:

此时,相邻导频段被认为是相邻符号,再利用Kay算法思想,利用相邻符号的相位差求解频偏,因此频偏估计结果为:

其中,NP表示导频段的段数;Ns表示每段导频的长度,取36;Nd表示数据段长度,取1 440。由于|2πkTΔf|<π,因此该算法的理论估计范围为与原算法估计范围相比,改进后的算法具有其2倍的估计范围。
3 性能分析
3.1 算法复杂度分析
粗估计算法的优化充分利用符号间的间隔L=2。将文献[12]和本文中粗估计算法的计算复杂度进行对比,结果如表2所示。数据采用不同的调制方式,导频段数不同,设为s段。达到粗估计精度所需要的数据帧数设为n帧。

表2 优化前后的算法复杂度对比
3.2 仿真性能分析
本文仿真参数如表3所示。
DVB-S2X协议中指出,多普勒频移变化率引起的抖动为30 kHz/s,超过表1中给出的不同场景下常用参数的数值。根据计算,传输一帧数据大约需要0.7 ms,在该段时间内变化率引起的频偏大约为21 Hz。因此,本文变化率引起的频偏扰动δ,参考协议标准将其设为0~21的随机数。DVB-S2X协议中还指出,总频偏可能达到符号速率的20%,若符号速率为25 Msps,则频偏为5 MHz。在载波频率为30 GHz时,5 MHz的频偏对应的相对速度为50 000 m/s,同样也超过表1中给出的不同场景下常用参数的数值。通信系统中,不仅会因为相对运动产生频偏,还会因为接收机与发射机的晶振不同等其他原因产生频偏。因此,本文初始频偏设为0.2倍符号速率(即5 MHz),其包含相对运动、硬件等造成的频偏。

表3 仿真参数
图5给出文献[12]和本文中粗估计算法的频偏估计均方根误差对比结果。可以发现,粗估计在0.2倍符号速率频偏下,性能略有下降,但是随着频偏的减小,优化后的性能更佳。
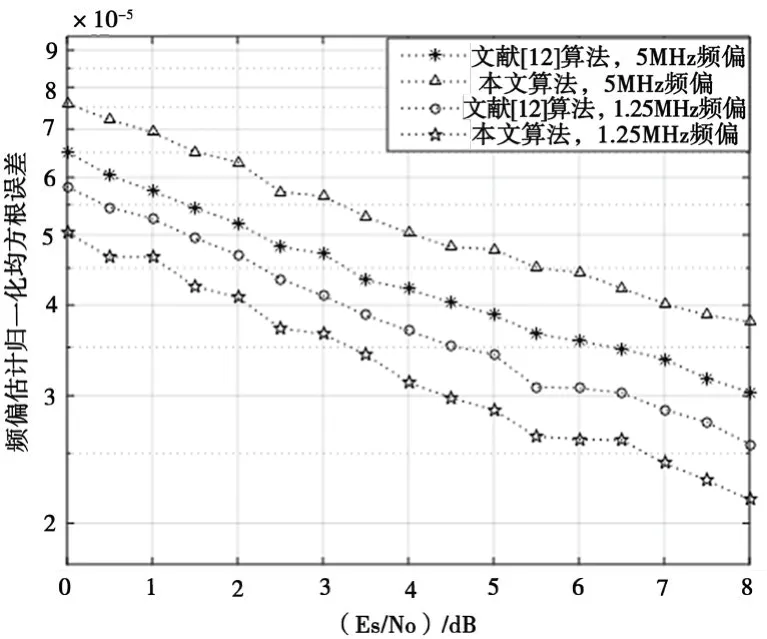
图5 粗估计算法归一化均方根误差对比
图6 为文献[12]和本文中细估计算法仿真对比。1 kHz以上频偏时,本文算法保持原算法精度;0~1 kHz时,与原算法相比,本文算法精度更高。0 Hz以下频偏时,原算法无法对该类频偏进行捕获,而改进后的本文算法在该范围内仍具有较高的精度。相对来说,优化后的细估计算法估计范围扩大2倍。
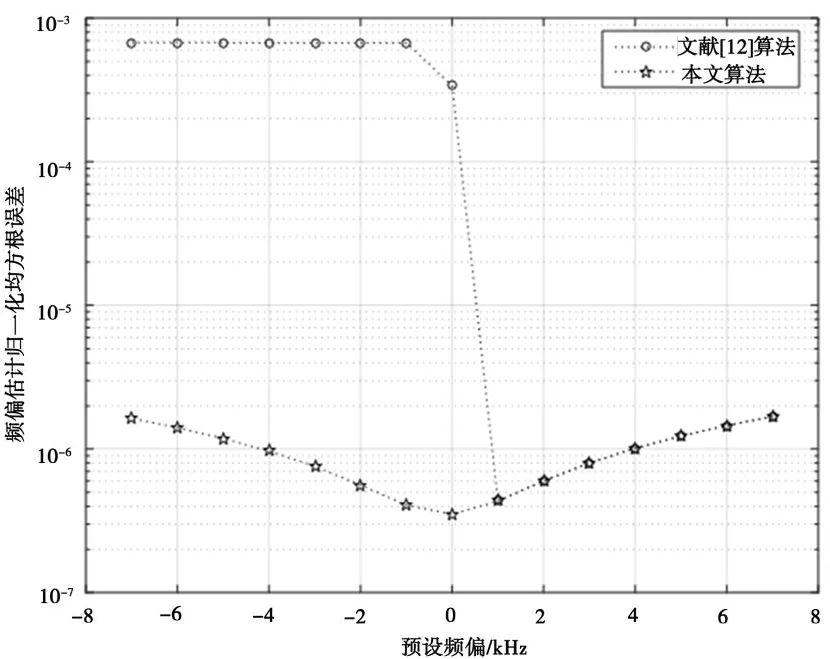
图6 细估计算法归一化均方根误差对比
通过100 000次测试,在0 dB时,频偏为200 Hz(约为符号速率的10-6数量级),链路误码率接近0。图7给出本文粗、细估计级联和文献[12]粗估计和本文细估计级联的仿真曲线图。对比图中曲线,本文算法虽然在0.2倍符号速率频偏时,性能略有下降,但是在0 dB时,频率估计归一化均方根误差约10-7数量级。也就是说,大约偏离设定值20 Hz,远小于译码门限。另外,0.05倍符号速率时,优化后的级联算法性能更优。通过图5和图7可以看出,粗估计采用20帧将频偏从20%降到10-5,再采用细估计将其收敛至10-7。经仿真测试,正常解调译码所能接受的频偏约为10-6。该估计器性能完全满足解调译码的需求。
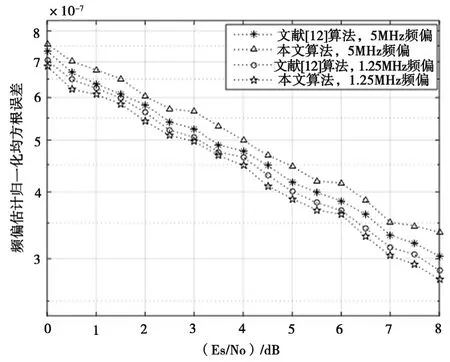
图7 级联算法归一化均方根误差对比
4 结 语
高动态场景下多普勒频移大,采用一步频偏估计算法无法达到解调译码所需精度,故采用粗估计和细估计结合的思想实现频偏收敛。优化前的细估计算法无法实现级联效果,优化后的细估计算法在保持原有精度的条件下,频偏估计范围是优化前的2倍。粗估计算法优化后,与原算法精度相当的同时,计算复杂度为优化前的25%。优化后的级联算法将频偏从20%收敛至10-7,而正常解调译码所能接受的频偏约为10-6,充分说明该估计器具有较高的精度,完全能满足接收端解调译码的需求。
猜你喜欢
核安全(2022年3期)2022-06-29
光通信研究(2022年1期)2022-02-18
华东师范大学学报(自然科学版)(2019年2期)2019-06-11
—— “T”级联
同位素(2019年1期)2019-03-14
中国惯性技术学报(2019年6期)2019-03-04
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
火控雷达技术(2016年3期)2016-02-06
移动通信(2014年6期)2014-07-09
汽车与新动力(2014年4期)2014-02-27
