
基于智能手机的多传感器结合室内定位
2019-01-21 00:57:12吴树坤王新珩董育宁
计算机技术与发展 2019年1期
吴树坤,王新珩,董育宁
(1.南京邮电大学 通信与信息工程学院,江苏 南京 210003;2.西苏格兰大学 工程和计算机学院,苏格兰 佩斯利 UKPA12TR)
0 引 言
近些年,随着智能手机的广泛应用和室内环境的复杂化,国内外许多研究机构开始着力于研究室内定位导航技术。目前主要的室内定位技术主要有:Wi-Fi定位、磁场定位、超声波定位、蓝牙定位、红外线定位以及射频识别定位等[1]。其中,随着日益增长的大众移动设备上网需要和公共场所Wi-Fi节点铺设的不断成熟,丰富的Wi-Fi信号资源为室内定位提供了很好的基础。
如文献[2-3]所述,Wi-Fi定位一般通过指纹库的方法实现,这种方法一般需要两个阶段。第一阶段需要建立指纹数据库。对于Wi-Fi定位,需要通过手机或其他电子设备在定位区域收集相关点及其对应的Wi-Fi信号强度,并根据其对应关系储存在数据库中。而第二阶段,则是在区域内收集相关信息,在已建立数据库的基础上,通过相关信息与数据库中的数据进行比对,实现位置估计。而关于比对过程,目前主要有两种计算方式。一种是利用K最邻近算法,其核心思想是如果一个样本在特征空间中的K个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。该方法在确定分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别。该算法在类别决策时,只与极少量的相邻样本有关。所以,当样本不平衡时,如一个类的样本容量很大,而其他类样本容量很小时,有可能导致当输入一个新样本时,该样本的K个邻居中大容量类的样本占多数,从而使定位产生误差。而另一种方式则是以粒子滤波、卡尔曼滤波算法为代表,这类算法利用概率分布对实际的状态进行估计与预测,选择概率最接近的值来代替真实值,相对于K最邻近算法更加有优势,常应用于定位。
由于Wi-Fi信号易受建筑物阻挡且采集信号周围信号具有相似性,以及算法本身的限制,Wi-Fi定位技术存在较大的误差。目前很多投入商用的Wi-Fi定位系统都具有定位漂移的情况。与此同时,在室内环境中,受到建筑物本身结构与材料的影响,建筑物内部会产生相对稳定的磁场,从而提供了一种固有的资源来进行定位。
针对以上情况,文中设计了一种Wi-Fi定位与地磁定位相结合的方法,利用手机多个传感器收集Wi-Fi与磁场信号,利用磁场信号的合成量,有效地提高了特征收集过程的便利性,同时在算法上利用改进的粒子滤波,可以利用较少数量的Wi-Fi热点实现定位以降低定位误差,更简便高效地实现定位。
1 多传感器定位系统
Wi-Fi定位技术目前是应用非常广泛的一种定位技术,这得益于Wi-Fi的资源优势,但是通常Wi-Fi定位系统收集的Wi-Fi信息在相近区域会保持同样的值。根据文献[4]可知,在单纯利用Wi-Fi信号进行定位时,精度大多在3 m左右,而且,由于Wi-Fi信号易受墙壁阻隔与反射,而且天气状况会影响到Wi-Fi信号的波动,使得目前很多Wi-Fi定位技术的体验并不好。传统的用于智能手机的多传感器定位系统有Wi-Fi、蓝牙结合系统,而由文献[5]可知,此类系统功耗且误差波动都较大,无法提供很好的定位体验。
而近年来,随着国外相关机构对磁场定位的研究增多,磁场室内定位逐渐成为室内定位研究的新热点。文献[6-9]描述了地磁场定位的基本原理及可行性。目前的研究大都将室内磁场信号分解为三个正交分量,三个分量作为定位的三个特征,建立指纹库,实现定位。文献[10]给出了一种实现基于地磁场的室内定位的方法,但是该方法更适合于定位机器人,因为手机的磁场传感器位置是固定的,在日常的基于智能手机的定位当中,无法保持手机始终处于同一种姿态,这也就无法保证每次收集的信息来自同一方向。但是,考虑到智能手机上的使用,将磁场的三个分量进行合成,由于三个方向上的分量稳定,其合成量也就是稳定的。文中则是将Wi-Fi传感器与磁场传感器相结合,利用这两种特征实现定位。在以往类似的研究中,文献[11]也介绍了Wi-Fi传感器与磁场传感器结合的例子,但是此例是利用Wi-Fi先进行区域判定,再用磁场进行下一步区域内定位,该方法利用了传统的最邻近算法,所以精度提高不理想。
本系统首先需要通过智能手机在预先规划好的测试范围遍历区域内的所有采样点,将相应的信号强度、MAC地址以及位置信息等记录在指纹数据库的采样点收集数据建立对应的指纹库,然后利用改进的粒子滤波算法对给定的Wi-Fi及磁场信息进行处理匹配,得到估计位置。
2 改进的粒子滤波算法
(1)

(2)
对重要性概率密度q(x0:k|z1:k)进行如下分解:
q(x0:k|z1:k)=q(xk|x0:k-1,z1:k)q(x0:k-1|z1:k-1)
(3)

(4)
将式2和式3代入式4,可得粒子的权重为:
(5)
(6)
假设重要性概率密度由先验概率表示:
(7)
把式7代入式6,得到粒子的权重为:
(8)
对权重进行归一化处理:
(9)
后验概率密度p(xk|z1:k)可表示成:
(10)
基本的粒子滤波算法步骤如下:
(2)更新。计算k时刻粒子集权重,更新权重:

2,…,N
(11)
并对粒子权重进行归一化处理,见式9。
计算粒子集的加权和估计状态变量当前时刻的状态值:
(12)
(5)令k=k+1,得到新观测值后转到第2步。
但是,基本的粒子滤波在实际应用中,采样频率越高,粒子越接近正确的状态,追踪效果越好,同时,累积误差也越大,在持续的定位中误差会越来越大。重采样可以有效抑制这一现象,但会降低粒子的有效性,粒子无法表现目标的后验密度分布。
文献[14]针对上述情况,提出了一种改进的粒子滤波算法,在重采样部分,采用式13和式14中的方法。
(13)
(14)
3 仿真及结果分析
本次实验场所选取南京邮电大学科技楼1512实验室。将实验室划分为14*9格,每格为0.6 m*0.6 m的正方形,并在实验室布置三个AP点。收集过程中手机置于每格的中心,高度约为1.4 m。共收集到126组数据,每组数据包括所在位置处的磁场合成量以及可搜索到的Wi-Fi名称及其信号强度大小。Wi-Fi单位取dBm,其中,信号搜索不到的位置,将此位置的信号强度设为-100 dBm,磁场单位取μT。
实验在区域中(3,4),(11,5),(14,9)处分别布置AP1,AP2,AP3三个热点。图1给出了各AP点与磁场在室内的信号分布情况,白色区域为信号的峰值区域,每一个峰值区域都表示为一次波动。可以看出,Wi-Fi分布区域变化都没有磁场合成量的变化特征强,相较之下,磁场值更具有定位优势。
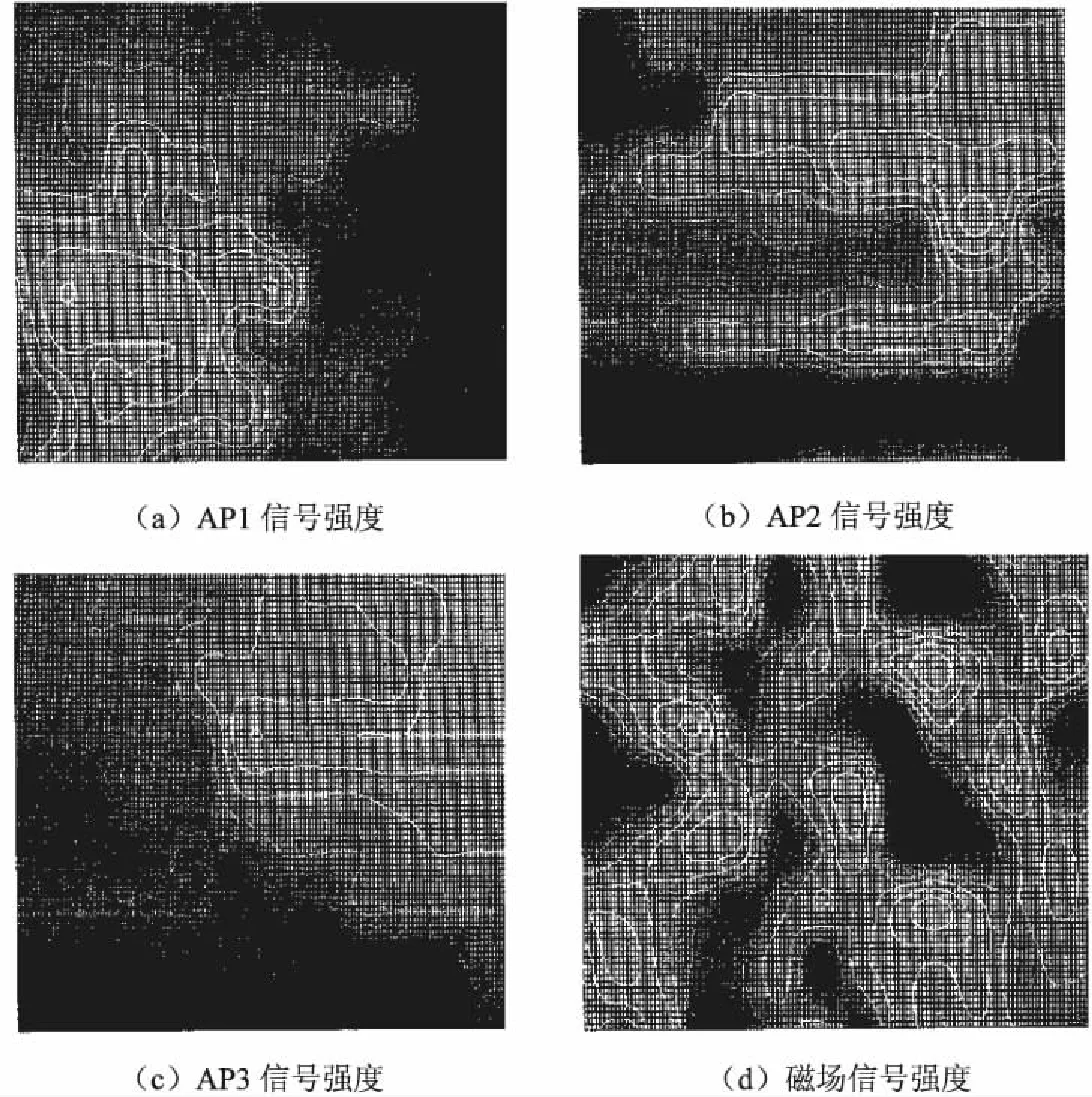
图1 信号强度分布图
将手机采集的数据在Matlab中进行处理,利用改进的粒子滤波进行仿真,仿真模拟随机步行200次以测误差,并分为以单独的磁场合成量,AP1、AP2、AP3结合,磁场与AP1、AP2结合,三种定位方式进行对比。

图2 仿真定位误差图
根据图2可以看出,单独磁场合成量的定位,由于只是用磁场量这一个特征,样本匮乏,而文献[13]中提到,粒子滤波需要用大量的样本数量才能很好地近似系统的后验概率密度,所以在这种情况下提取粒子时,无法保证提取的粒子覆盖到真实位置,所以定位误差处于比较高的状态,估计位置偏移较大,定位无法达到理想效果。而当增加特征数量后,由多个特征的观测数据与状态变量构成的对应关系则更加稳定。全部用Wi-Fi来定位,起始点定位误差虽小,但是其后验概率密度并不是很理想,某些点的误差较大,而且随着步行距离增长,误差会不断累积,逐渐无法达到定位效果,但整体也优于单独磁场合成量的定位。而将其中一个Wi-Fi换作磁场合成量后,定位误差则进一步改善,一直处在较好的水平,可以很好地提高定位效果。
为了进一步验证上述结果的可靠性,共进行了5次200步实验与5次400步实验,并统计其误差,如表1、2所示。磁场与AP1、AP2结合的定位精度优于AP1、AP2、AP3结合的定位精度,同时也优于文献[2-3]中的定位精度,而单独磁场合成量的定位误差最大。另外在400步实验中可以发现,每一种定位方式,在定位步数增大后,虽然所用算法已有所改进,但是由于粒子重采样次数增多,粒子的多样性也会降低,导致定位误差不断累积。

表1 5次200步实验误差对比 m
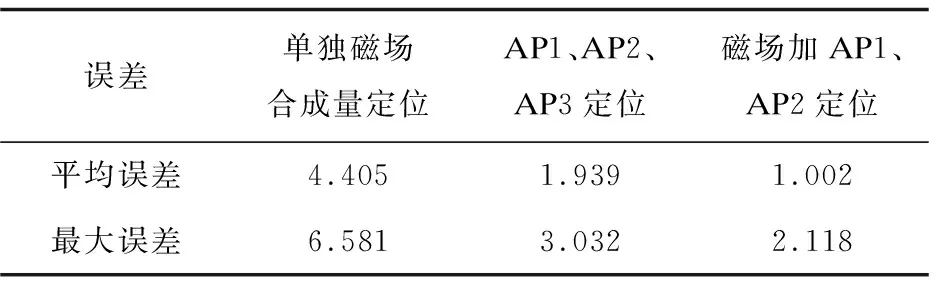
表2 5次400步实验误差对比 m
4 结束语
磁场可作为一种定位特征用于室内定位,单独的磁场定位,在应用定位机器人实验时,可以达到较好的效果,但是一旦用于实际的智能手机条件下,在收集方面比较困难。文中在收集上简化了操作,这样收集到的特征会相对减少。一般情况下,单独的Wi-Fi定位收集到的特征多,但是受限于Wi-Fi自身的分布,其丰富度不够。但在Wi-Fi定位的基础上,加入磁场合成量,可以较好地提高定位效果与数据收集的便易性。未来,可以在定位算法上寻求更加可靠简易的算法应用于智能手机,尤其是可以根据人的行走路径规律[15],进行分析研究以改善算法。
猜你喜欢
红领巾·萌芽(2022年9期)2022-11-24 05:55:58
当代陕西(2022年6期)2022-04-19 12:11:54
娃娃乐园·综合智能(2021年12期)2022-01-18 05:46:42
英语文摘(2020年5期)2020-09-21 09:26:30
趣味(语文)(2018年8期)2018-11-15 08:53:00
中学生数理化·高二版(2016年12期)2017-02-28 10:08:42
Coco薇(2016年1期)2016-01-11 16:53:24
空间控制技术与应用(2015年3期)2015-06-05 14:30:31
遥测遥控(2015年2期)2015-04-23 08:15:18
小说月刊(2014年4期)2014-04-23 08:52:21
