
基于接收机捕获性能的GPS压制干扰效果分析
2019-01-19 07:46曾芳玲欧阳晓凤
舰船电子对抗 2018年6期
张 坤,曾芳玲,欧阳晓凤,赵 元
(国防科技大学,安徽 合肥 230037)
0 引 言
GPS应用领域不断扩展,已广泛应用于民用和军用的导航定位领域,如何采取最佳干扰方式对敌方武器系统实施干扰,从总体上降低其情报侦察、精确打击、指挥控制等系统的作战效能,已成为近年来导航对抗研究的热点[1]。对GPS干扰装备作战效能客观、准确的估计,对改善其干扰和抗干扰性能均具有重要意义,而国内针对导航干扰效果评估的研究成果较少,没有形成统一、权威的干扰效果评估体系[2]。本文主要针对GPS信号捕获过程,提出用平均捕获时间和捕获时间方差2个评估指标来分析对GPS接收机的干扰效果,并对窄带和宽带干扰条件下的上述指标进行了模拟仿真,来验证以上指标对于评估GPS干扰效果的有效性。
1 GPS信号捕获的原理
1.1 信号捕获的理论分析
GPS接收机的基本问题是对伪随机序列的捕获,对GPS信号的成功捕获是接收机实现跟踪、数据解调和定位解算的前提[3]。为了捕获GPS的卫星信号,一般需要同时复现卫星的码和载波。因为每颗GPS卫星在同一频率上播发经不同伪码调制过的载波信号,接收机在跟踪之前一般需要复现载波频率和C/A码相位。通常接收机按照1~32颗卫星的顺序依次对各颗卫星的载波频率和码相位进行二维搜索,信号捕获的原理框图如图1所示。
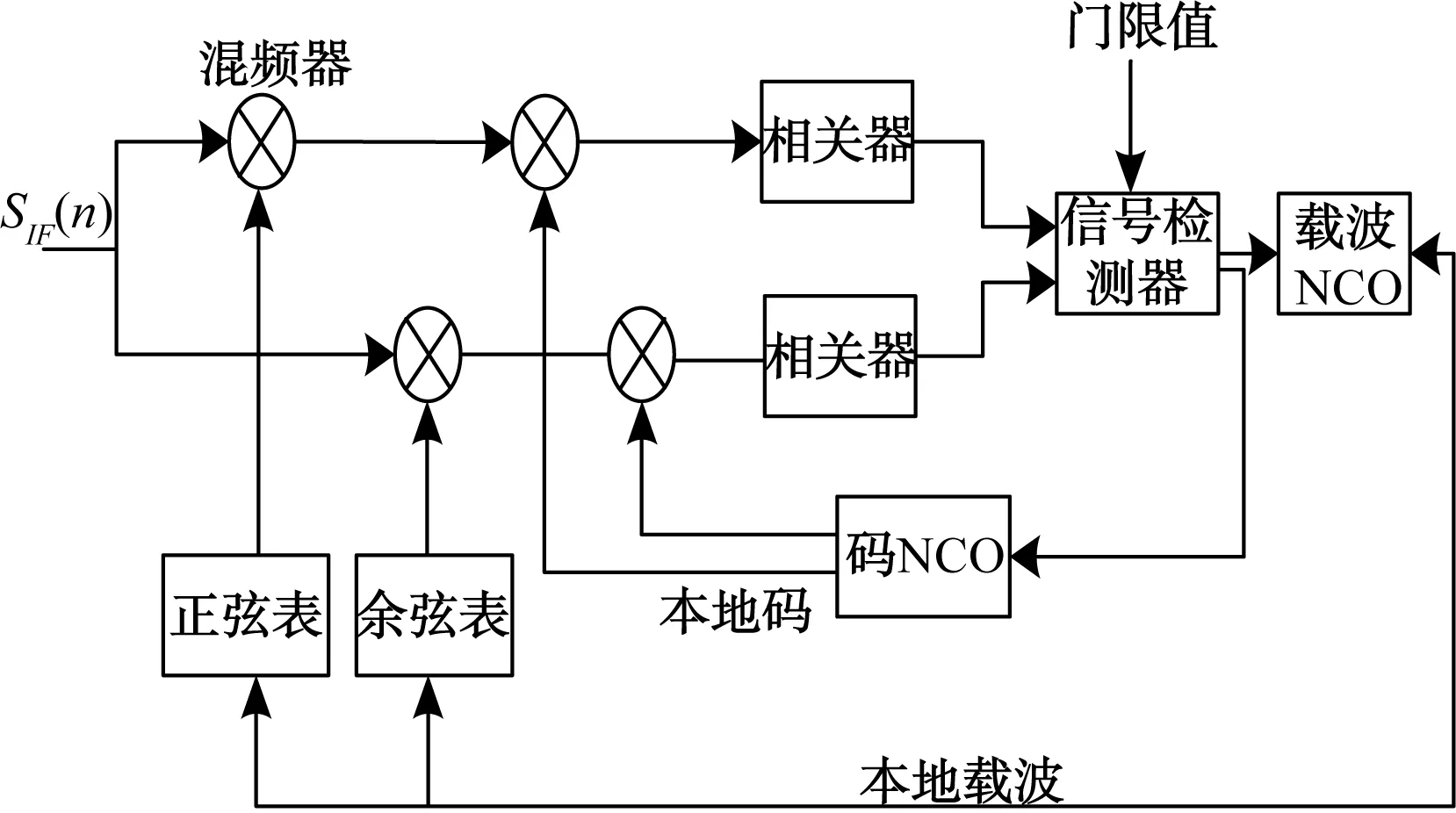
图1 GPS信号捕获原理框图
C/A码采用特殊PN序列码,具有尖锐的自相关峰且与加性高斯白噪声(AWGN)基本不相关,GPS信号捕获的实现就是利用其良好的自相关性和互相关性,通过相关峰值的检测提取对应的码相位和载波频率,完成信号捕获[4]。
1.2 信号捕获的实例说明
图2~图3为无干扰条件实验下的一次捕获的结果图。图2为32颗卫星的捕获情况;图3为其捕获到的第14颗星的相关峰图,其中x轴表示多普勒频率的搜索方向,y轴表示伪码相位的搜索方向。图中有一个明显的尖峰,该尖峰表示接收的GPS信号中存在该PRN伪随机码调制的信号,同时该峰值所在的位置也指明了对应的伪码相位和多普勒频率。

图2 信号捕获结果

图3 信号捕获相关峰图
2 压制干扰对GPS接收机干扰效果的影响
完成信号搜索所需要的时间取决于对一个信号进行二维搜索的不定区间大小。干扰信号正是通过引起多普勒估计误差和码估计误差改变其不定区间的大小和范围[5],本文通过干扰前后的平均捕获时间和捕获时间方差这2个统计量反映干扰效果的优劣。
2.1 压制干扰对接收机平均捕获和捕获时间方差的影响
平均捕获时间Tavq可以用来衡量信号捕获的快慢程度,接收机对卫星信号的频率和码相位先验信息掌握得越准确,相应的搜索范围就越小,信号捕获就会越快。压制干扰通过改变对信号的虚警概率和检测概率实现对平均捕获时间和方差的影响,根据信号梅图理论,可以得到C/A码顺序搜索时的平均捕获时间[6]为:
(1)
式中:q=2N=2 046;TD为积分时间;Pf、Pd分别为信号的虚警概率和检测概率。
捕获时间方差也能反映其捕获性能,其表达式[7]为:
6qk(k+1)Pf(2Pd-Pd2)}
(2)
其中:
(3)
式中:n为连续正确判决的次数;k为错误判决代价因子。
2.2 宽带干扰对信号捕获的影响
接收机混频器的输入端信号可以表示为:
i(t)=s(t)+n(t)+j(t)
(4)
式中:s(t)=PsD(t)cos(2πft+θ),为GPS信号(其中,信号平均功率设为Ps,D(t)为C/A码序列);n(t)为高斯白噪声,其通过中频滤波器后的双边功率谱密度为N0/2;j(t)为干扰信号。
GPS系统采用了伪随机码扩频技术,属于典型扩频系统。对于扩频接收机,顺序搜索捕获过程的虚警概率和检测概率分别为[7]:
(5)
(6)
式中:μ0和σ0分别为无信号情况下虚警概率的均值和标准差;μ1和σ1分别为存在信号时检测概率的均值和标准差。
当j(t)为宽带干扰时,假设其干扰带宽与C/A码信号带宽相同,其在GPS接收机的通带内均匀分布,可视为白噪声能量的增加,设宽带干扰的双边带功率谱密度为NJ/2,同理可知宽带干扰和噪声经过中频滤波器总的双边功率谱密度为N0/2+NJ/2。推导可知宽带干扰下的各参数表达式为:
(7)
(8)
(9)
(10)
式中:W为射频滤波器带宽(W=2/Tc=2 MHz);B为中频滤波器带宽;PJ/N为干噪比;S/N为中频信噪比;TD为积分时间。
2.3 窄带干扰对信号捕获的影响

μ0=N0B+2Sj(f)·B=
(11)
(12)
(13)
(14)
3 仿真结果
3.1 宽带干扰对信号捕获的仿真分析
在进行干扰的仿真时,首先要确定检测概率和虚警概率的门限值,可以通过设定一个虚警概率的值,然后把无干扰下的式(7)和式(8)代入式(5),继而根据erf(x)的反函数求得,再代入式(5)和式(6)求得检测概率和虚警概率,最后即可求出干扰下的捕获时间和方差。
图4和图5表示了不同积分时间宽带干扰的平均捕获时间和捕获时间方差的仿真曲线。可以看出,当积分时间增加时,捕获时间和捕获时间方差随之增加,即减少积分时间可以一定程度上改善接收机的捕获性能;且干噪比在25 dB之前时,捕获时间和方差几乎保持不变,这说明GPS接收机本身有一定的抗干扰能力,但随着干噪比继续增加,捕获时间和方差急剧增加,最终导致接收机捕获时间过长甚至无法捕获。

图4 不同积分时间的平均捕获时间

图5 不同积分时间的捕获时间方差
3.2 窄带干扰对信号捕获的仿真分析
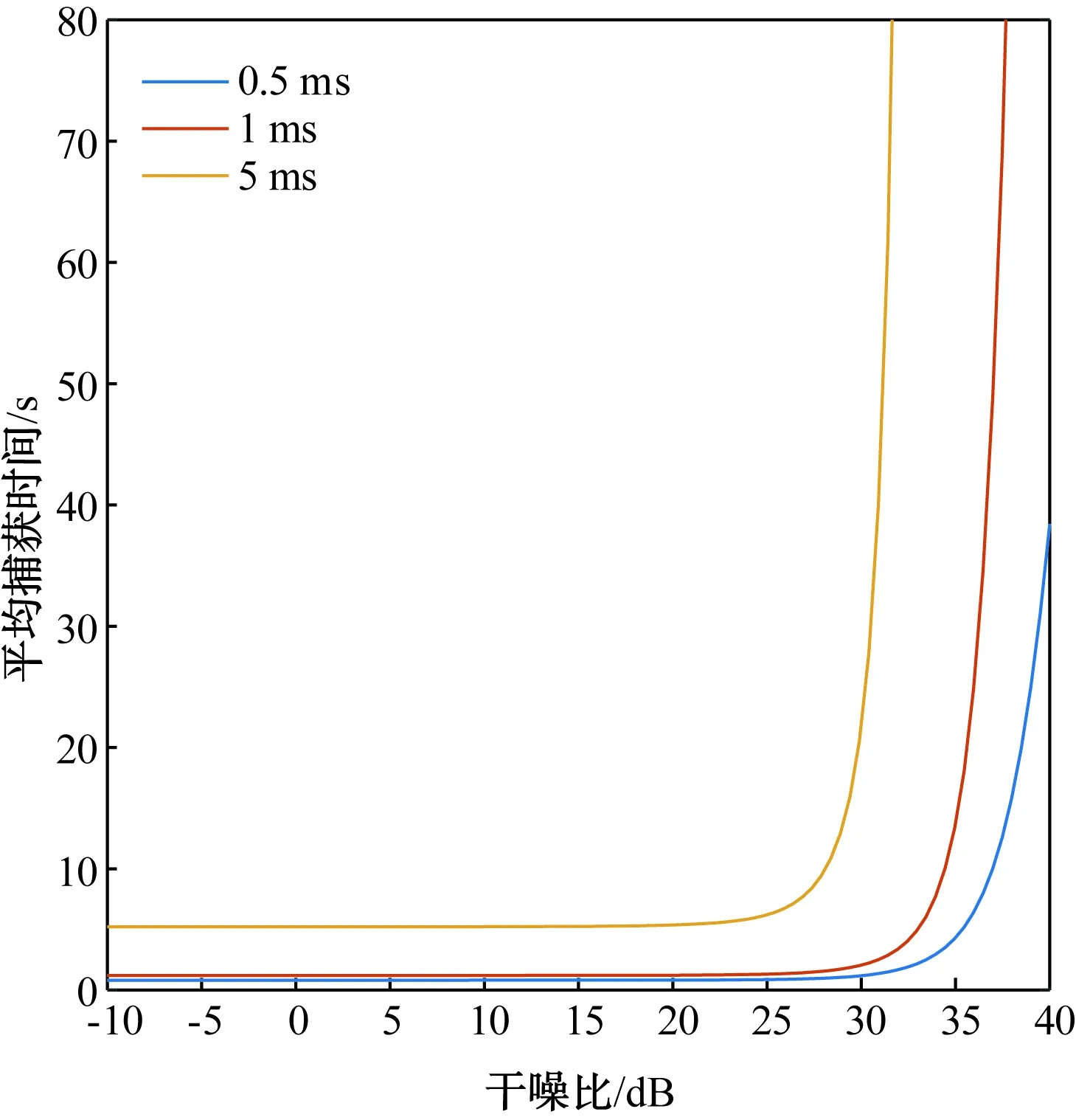
图6 不同积分时间的平均捕获时间

图7 不同积分时间的捕获时间方差
图6和图7表示不同积分时间和干信比下窄带干扰平均捕获时间和捕获时间方差的仿真曲线。关于干扰功率和积分时间的结论与宽带干扰的结论相同,且对比图4~图7可知窄带干扰比宽带干扰效果要大3 dB左右。
而对于具有数字滤波器技术时域滤波和频域滤波等的抗干扰接收机,时域滤波是在时域内对信号进行处理,由于窄带干扰较强的相关性,其当前值可以根据过去值预测,运用数字信号处理方法实现可编程有限冲激响应(FIR)/无限冲激响应(IIR)滤波器[9],并通过提取干扰参数来调整滤波器的权值系数,通常可以提供20~35 dB的抗窄带干扰能力,但对宽带干扰效果不佳;频域滤波是通过离散傅里叶变换(DFT),把接收信号转换到频域进行处理,对于能量集中的窄带干扰采取置零或其他衰减办法,去掉大部分的干扰信号。相比时域技术,频域处理技术方法简单,能提供更大的零陷深度,对窄带干扰抑制度可达35 dB以上[10],但对宽带噪声干扰无效。
4 结束语
文中通过对GPS接收机处理信号的过程分析,针对接收机信号捕获过程提出用平均捕获时间和捕获时间方差来描述不同干扰下的干扰效果。通过定量分析计算和仿真结果较清晰地表征了在窄带和宽带干扰下不同干信比和积分时间条件下接收机捕获时间和方差的变化情况。仿真结果表明GPS接收机有一定的抗干扰能力,减少积分时间可以一定程度地提高捕获性能,但决定性因素还在于干扰功率,且窄带干扰效果要优于宽带干扰。但对于具有数字滤波器技术的抗干扰接收机,窄带干扰被抑制,宽带干扰效果则要更佳。
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
导航定位学报(2022年1期)2022-02-17
中学生数理化(高中版.高考数学)(2021年3期)2021-06-09
计算机系统应用(2019年11期)2019-11-15
中国电气工程学报(2019年18期)2019-10-21
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
电子制作(2019年24期)2019-02-23
初中生世界·九年级(2017年10期)2017-11-08
中学生数理化·八年级数学人教版(2016年5期)2016-08-23
