四旋翼控制碟形变体飞艇设计与气动特性分析*
2019-01-18 11:21沈宝国
机械研究与应用 2018年6期
宗 剑,沈宝国
(江苏航空职业技术学院 航空工程学院,江苏 镇江 212134)
0 引 言
飞艇属于浮空器的范畴,相比重于空气的固定翼类和旋翼类的飞行器,飞艇具有能长时间空中巡航或悬停、能耗与费效比低、噪音与废气污染相对较小等优点[1]。由于飞行艇身的庞大结构特点,致使飞艇在巡航或悬停时存在抗风性能较差,这也是限制传统飞艇广泛使用和进一步推广使用的主要原因之一[2]。虽然如此,飞艇的某些优点在某些领域的应用也是目前其他类航空器所替代不了的,如地震灾区或无信号区需搭建应急临时空中通信平台、空中无线电监测平台[3]和伪卫星定位平台[4]等,就要求搭建的空中平台具备较长连续工作时间的特点,目前这一点是其他类航空器无法满足的[5]。同时,为了降低现有无人机对处于发展瓶颈阶段电池的依耐性,大幅度提高无人机的续航能力[6],提高飞艇的抗风性能,相关研究人员开始关注传统的飞艇,对其进行研究并取得了一定的成果,如王璐的旋翼推进式无人飞艇[7]、李晓阳博士的变体飞艇[8]和肖治垣的径向变体飞艇总体参数估算方法[9]及变体飞艇太阳能电池阵列工作特性研究[10]等。笔者在此基础之上,首先提出一种四旋翼控制的太阳能碟形变体飞艇,对其进行结构设计,并对设计简化的可变艇体模型进行流场数值模拟计算和分析,得到了相应结果,为后续设计具有高抗风性能的碟形变体飞艇提供了重要的理论依据。
1 结构设计
考虑飞艇工作区间环境为对流层或平流层,所受风向主要来自于不定向的水平方向,为了减小艇身对风力方向的敏感性,所以在考虑设计滞空飞艇时,艇体几何模型应为无水平方向性,结合前人飞艇的设计经验,采用CATIA软件对四旋翼控制的太阳能碟形变体飞艇结构进行设计,具体结构如图1所示。
这种结构设计主要是通过伸缩机构和伸缩机构控制器来实现控制碟形飞艇的竖向变体,控制飞艇体积大小从而可以控制艇体的整体升降和根据需要提高其抗风性能;四个旋翼可控制碟形变体飞艇空中飞行的姿态且可根据艇体变体时飞行升力的需要进行差补缺失的升力;太阳能薄膜电池板贴附于碟形飞艇顶锥外表面,可以进行空中太阳能发电,有效补充碟形变体飞艇留空所需要的电能。实现控制变体核心的伸缩机构和伸缩机构控制器,分别如图2、3所示。
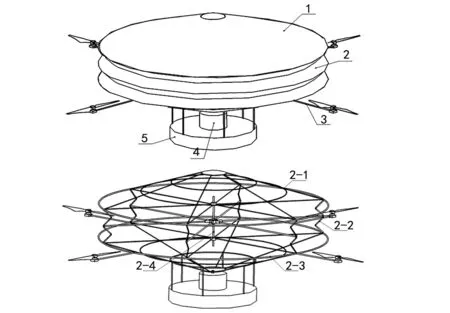
图1 四旋翼控制太阳能碟形变体飞艇结构1.太阳能薄膜电池板 2.可变艇体 3.四旋翼 4.氦气自动充抽气装置和充放电供电系统 5.艇载平台 2-1.构架式上艇盖 2-2.伸缩机构 2-3.构架式下艇盖 2-4.伸缩机构控制器

图2 伸缩机构2-1-1. 构架式上艇盖丝杆上滑座 2-2-1.构架式下艇盖转销2-2-2.构架式下艇盖连架杆 2-2-3.构架式下艇盖连架杆转销2-2-4.构架式下艇盖连杆 2-2-5.构架式下艇盖连杆转销 2-2-6.下连杆 2-2-7.下连杆转销 2-2-8.中连杆 2-2-9.上连杆转销 2-2-10.上连杆 2-2-11.构架式上艇盖连杆转销2-2-12.构架式上艇盖连杆 2-2-13.构架式上艇盖连架杆转销2-2-14.构架式上艇盖连架杆 2-2-15.构架式上艇盖转销 2-3-1. 构架式下艇盖丝杆下滑座
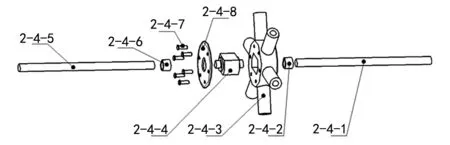
图3 伸缩机构控制器2-4-1.下丝杠 2-4-2.下联轴器 2-4-3.电机座 2-4-4.电机 2-4-5.上丝杆 2-4-6.上联轴器 2-4-7.电机座盖固定螺钉 2-4-8.电机座盖
四旋翼控制的太阳能碟形变体飞艇主部件包括太阳能薄膜电池板1、可变艇体2、四旋翼3、氦气自动充抽气装置4、充放电供电系统和艇载平台5。可变艇体2由构架式上艇盖2-1、伸缩机构2-2、构架式下艇盖2-3、伸缩机构控制器2-4组成,伸缩机构2-2由构架式下艇盖转销2-2-1、构架式下艇盖连架杆2-2-2、构架式下艇盖连架杆转销2-2-3、构架式下艇盖连杆2-2-4、构架式下艇盖连杆转销2-2-5、下连杆2-2-6、下连杆转销2-2-7、中连杆2-2-8、上连杆转销2-2-9、上连杆2-2-10、构架式上艇盖连杆转销2-2-11、构架式上艇盖连杆2-2-12、构架式上艇盖连架杆转销2-2-13、构架式上艇盖连架杆2-2-14、构架式上艇盖转销2-2-15组成。
伸缩机构控制器2-4由下丝杠2-4-1、下联轴器2-4-2、电机座2-4-3、电机2-4-4、上丝杆2-4-5、上联轴器2-4-6、电机座盖固定螺钉2-4-7、电机座盖2-4-8组成。
太阳能薄膜电池板1贴附在构架式上艇盖2-1蒙皮上表面,四旋翼3安装在构架式下艇盖2-3四根外杆上面,构架式上艇盖2-1和构架式下艇盖2-3通过伸缩机构2-2上下两端分别与构架式下艇盖转销2-2-1和构架式上艇盖转销2-2-15相联,伸缩机构控制器2-4安装在中连杆2-2-8上面,氦气自动充抽气装置4安装在构架式下艇盖2-3下面,艇载平台5通过六根杆与构架式下艇盖2-3固联。
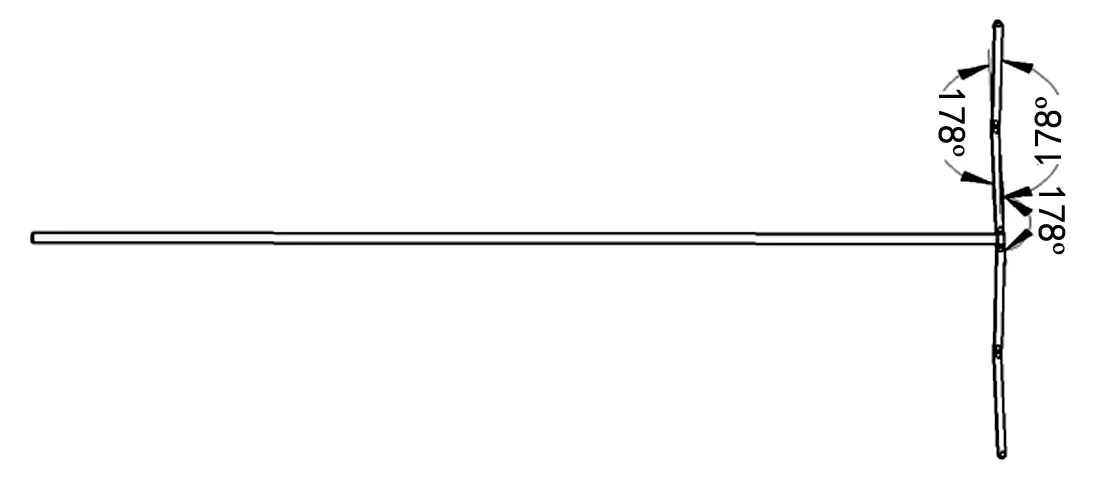
图4 伸缩机构最大伸长状态示意图
其中,为了防止死点实现机构可靠收缩,伸缩机构控制器2-4控制伸缩机构2-2伸长最长状态时构架式下艇盖连架杆2-2-2与构架式下艇盖连杆2-2-4所成角度为178°,下连杆2-2-6与中连杆2-2-8所成角度为178°,构架式上艇盖连架杆2-2-14与构架式上艇盖连杆2-2-12所成角度为178°,2-2-10上连杆与2-2-8中连杆所成角度为178°,如图4所示为伸缩机构完全伸长状态。
四旋翼控制的太阳能碟形变体飞艇变体过程示意图如图5所示。
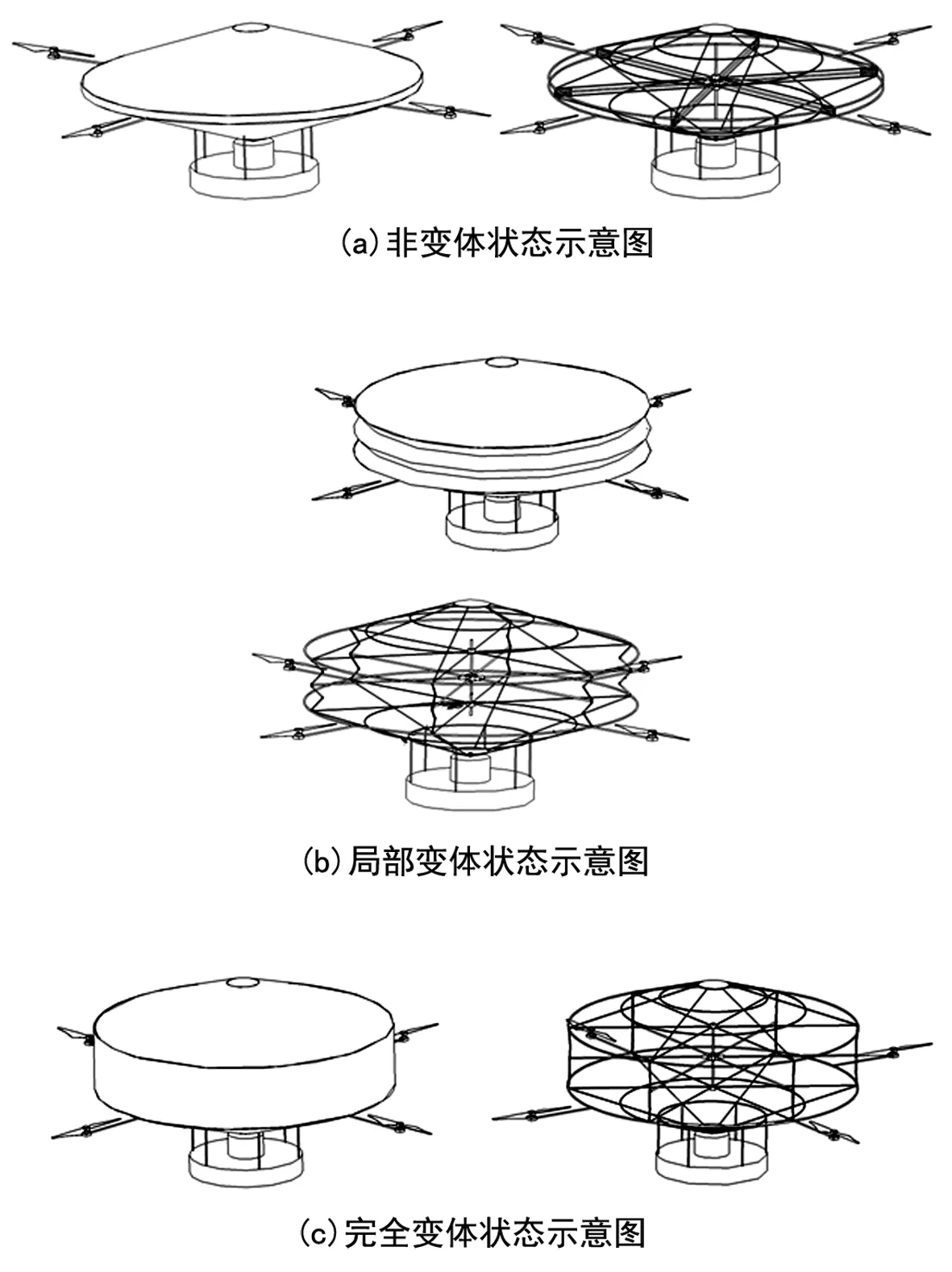
图5 飞艇变体过程示意图
2 计算模型
为了便于对设计的四旋翼控制太阳能碟形变体飞艇的气动特性进行研究,需要对计算模型和过程进行简化,这里模拟计算艇体的变体过程数据共有四组,每组为不同体积的飞艇,相关计算参数如表1所示。
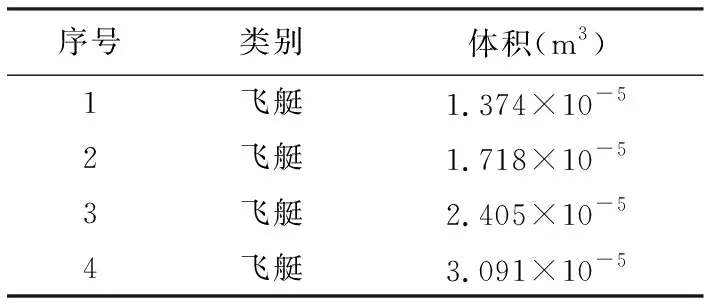
表1 变体飞艇的计算参数
对上面4组计算模型均采用CATIA软件进行建模,简化4组计算模型如图6所示。
上面模型中所使用的旋翼的翼型选自ProfiliV2的NACA M20翼型,计算旋翼模型几何直径为21.8 mm,旋翼模型如图7所示。

图6 简化计算模型
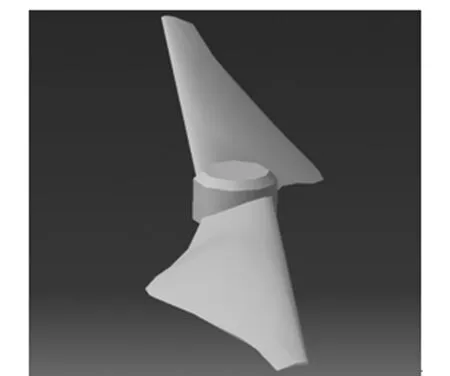
图7 旋翼计算模型
3 数值计算方法
3.1 模型计算工作条件假设
考虑飞艇滞空或飞行时所受风向主要来自于水平方向,计算模型具有无方向性,四旋翼控制飞艇飞行时整个挺身需要倾斜一定的夹角,计算时假设飞艇工作环境水平相对风速为6 m/s,飞艇工作(漂浮、飞行或处于抗风状态)时俯角分别设置为0°、-5°、-10°、-15°和-20°,旋翼转速分别设置为2 000 r/min、4 000 r/min、6 000 r/min、8 000 r/min、10 000 r/min和12 000 r/min。
3.2 网格划分
本文对各组三维模型均采用GAMBIT软件进行网格划分,对所有流场计算域采用非结构化网格进行划分。为了提高模型的计算精度和加快计算速度,对靠近模型计算流场场域的网格均进行模块化细化处理。计算模型网格几何尺寸均为计算模型几何尺寸的10倍,其中所划分1号飞艇网格数分别为1292278、2号飞艇网格数分别为1401608、3号飞艇网格数分别为1661628、4号飞艇网格数分别为1889602,各组计算模型网格划分如图8所示。
为了研究总装后飞艇艇身对旋翼气动特性影响,需要对旋翼单独进行气动拉力计算,旋翼网格划分网格总数为82340,如图9所示。
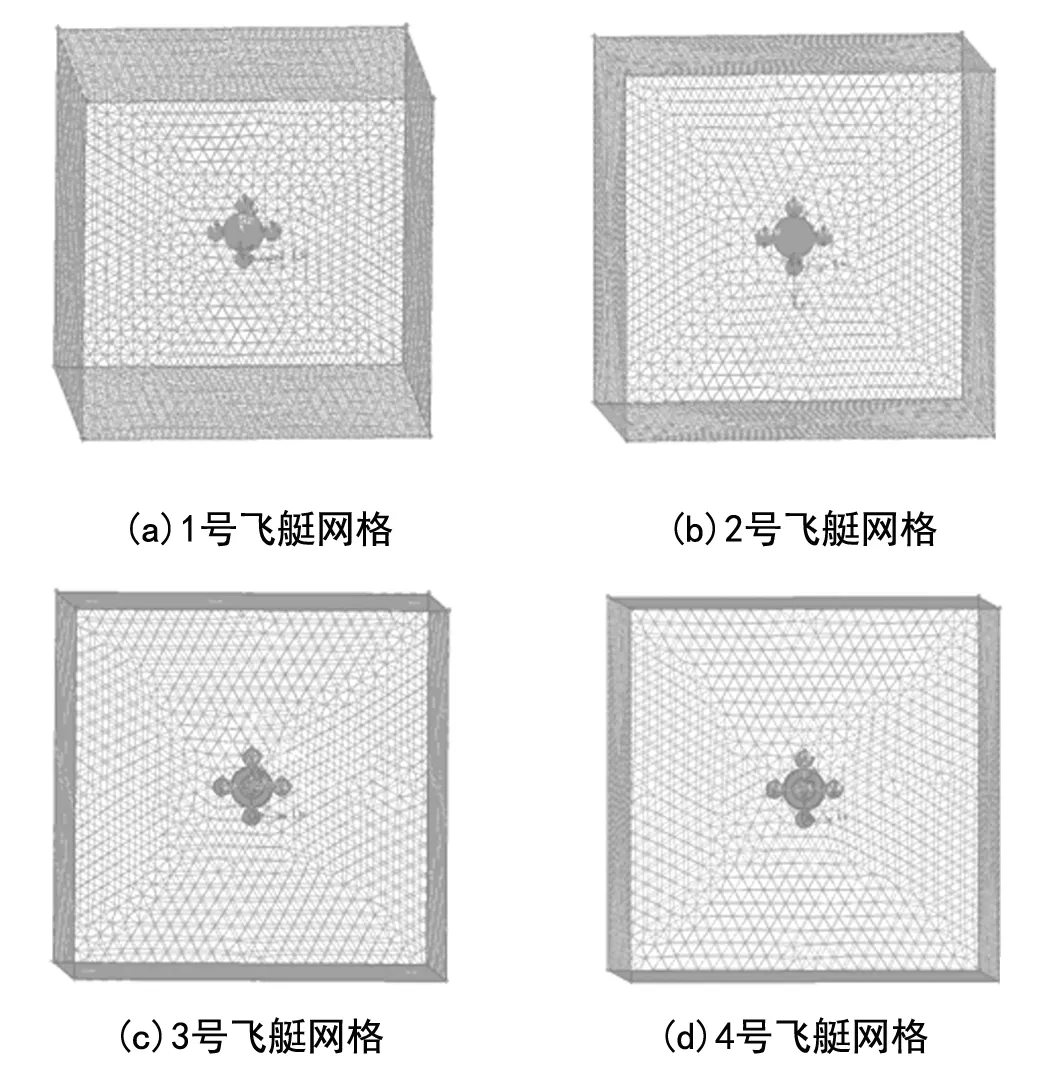
图8 飞艇计算模型网格划分
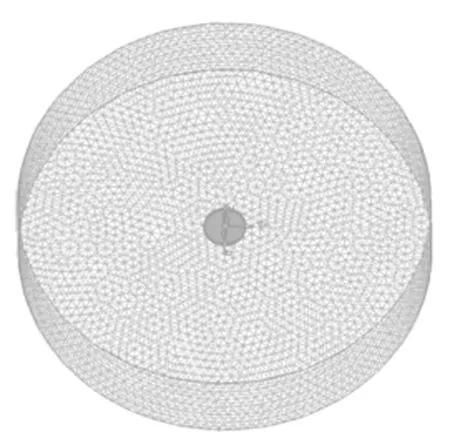
图9 旋翼计算模型网格划分
3.3 计算模型选择
三维模型流场的计算采用FLUENT软件进行数值计算,由于k-epsilon模型在FLUENT中属于双方程模型,具有较高的稳定性、经济性和计算精度,广泛应用高雷诺数湍流[11-13]。
相比其它计算模型,该模型虽计算量较较大,但比较适合于具有旋转湍流的流动问题,对有逆压梯度的边界层问题能够给出很好的计算结果,常用于空气动力学问题研究数值计算当中[14]。考虑旋翼高速旋转时对流体为可压缩的,为了得到较高的计算精度,本计算模型选用k-epsilon模型。计算域分别设进口为速度进口为边界条件,出口为压力出口为边界条件,计算的收敛程度可依据残差和阻力系数的收敛曲线来进行判断[15]。
4 计算过程与结果分析
4.1 计算过程
进口速度设置为0 m/s,对旋翼单独进行拉力计算,计算转速分别为2 000 r/min、4 000 r/min、6 000 r/min、8 000 r/min、10 000 r/min和12 000 r/min。如图10为旋翼转速为6 000 r/min时,计算所得的压力云图(单位:Pa)和速度云图(单位:m/s)。
对旋翼装配后进行拉力计算,此时设置速度进口速度0 m/s,分别计算飞艇总装后旋翼转速为2 000 r/min、4 000 r/min、6 000 r/min、8 000 r/min、10 000 r/min和12 000 r/min。如图11为当旋翼转速6 000 r/min时计算所得总装的压力云图(单位:Pa)和速度云图(单位:m/s)。
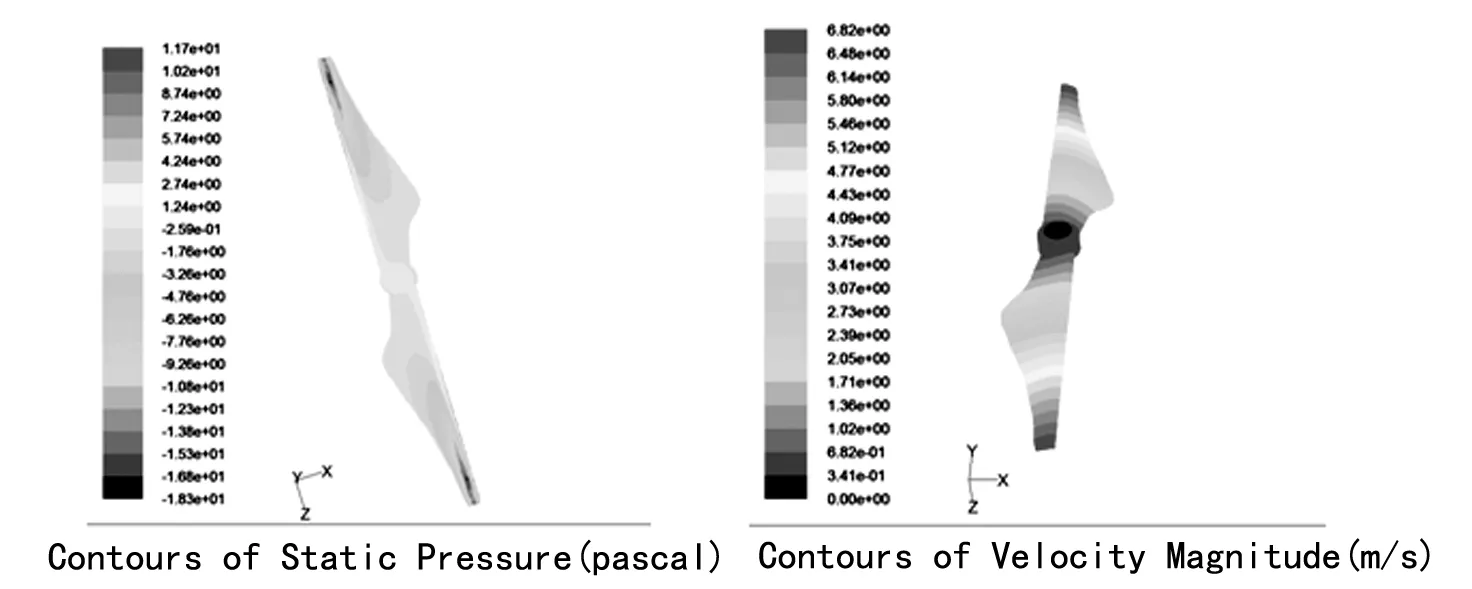
图10 转速6 000 r/min旋翼压力云图和速度云图
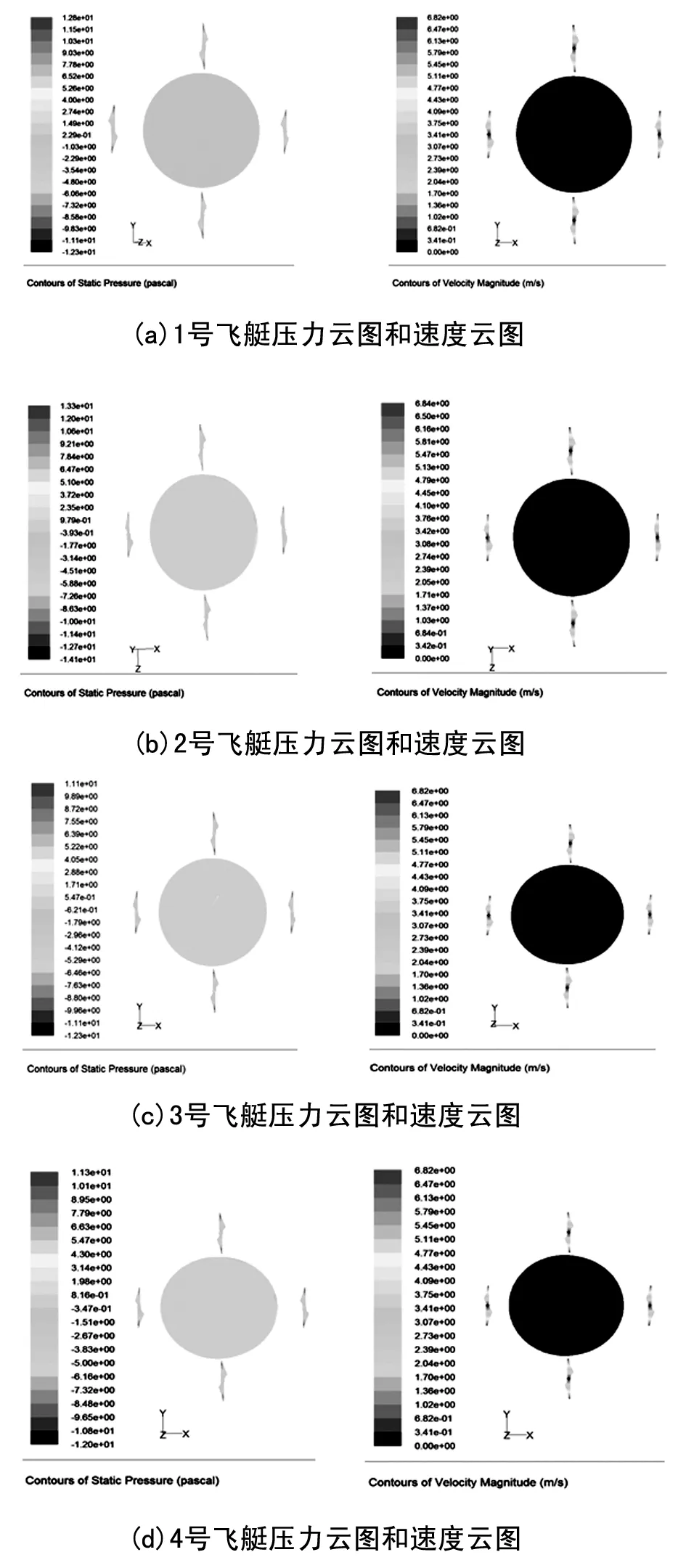
图11 总装旋翼转速6 000 r/min压力云图和速度云图
为了分析飞艇的飞行俯角对飞艇的气动特性影响,此时设置速度进口速度为6 m/s时, 飞艇旋翼转速为8 000 r/min,分别计算飞行俯角为0°、-5°、-10°、-15°和-20°。如图12为速度进口速度为6 m/s,旋翼转速8 000 r/min时,飞行俯角-10°,计算四组模型所得总装的压力云图(单位:Pa)。
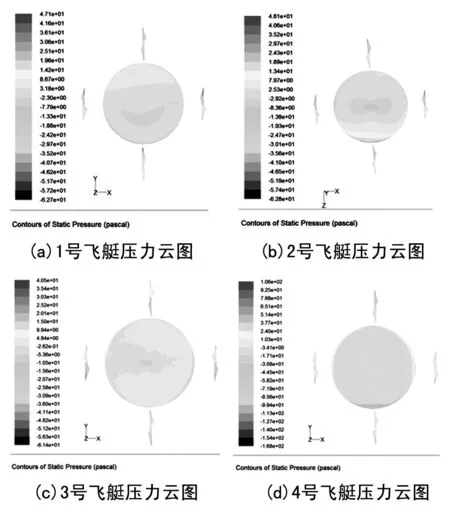
图12 风速为6 m/s俯角10°旋翼转速 8 000 r/min压力云图
4.2 结果分析
对单个旋翼旋转产生的气动拉力进行计算,把不同转速下气动拉力结果乘以4倍,等效总装后理想状态下旋翼总拉力,即为2对旋翼不同转速下的总拉力;2对旋翼分别安装在变体后的1号、2号、3号和4号飞艇上,对旋翼在不同艇体和转速下进行气动拉力计算,得到如图13所示四旋翼气动拉力的计算曲线。

图13 四旋翼气动拉力计算曲线
计算结果显示,旋翼单独工作时总气动拉力要比总装后总气动拉力要大,且随着旋翼转速增大,旋翼单独工作时总气动拉力与总装后旋翼总拉力差值也在增大,说明总装后,旋翼受到艇体干扰,旋翼转速越高,这种干扰越明显。随着艇体体积逐渐增大,旋翼单独工作时总气动拉力与总装后旋翼总拉力差值也在增大,说明艇体变体对旋翼拉力产生气动干扰,艇体变体增大和旋翼转速增加,这种干扰越明显。当2对旋翼转速均为12 000 r/min时,总装的旋翼总拉力至少降低为23.256%以上。
当速度进口速度为6 m/s,旋翼转速8 000 r/min时,对4组模型分别在不同俯角情况下进行计算,得到各组模型的阻力系数如图14所示。
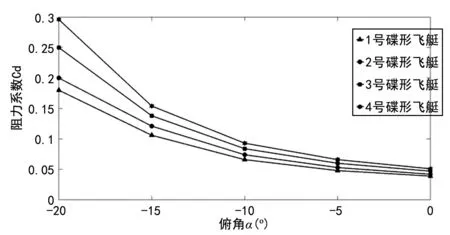
图14 飞艇变体阻力系数
计算结果显示,飞艇艇体的俯角一定时,艇体的阻力系数随着飞艇艇体变体的增大而增大;当飞艇艇体体积一定时,碟形飞艇阻力系数随着飞艇飞行俯角增大而增大;当艇体俯角超过-10°时,碟形艇体阻力系数增大幅度变大。
5 结 语
本文先对四旋翼控制的太阳能碟形变体飞艇进行结构设计,并对设计的结构进行气动特性计算和分析,计算结果分析如下:
(1) 旋翼单独工作时总气动拉力要比总装后总气动拉力要大,且随着旋翼转速增大,旋翼单独工作时总气动拉力与总装后旋翼总拉力差值也在增大,艇体与旋翼之间存在气动干扰,这种干扰随着旋翼转速增加干扰加强。
(2) 随着艇体变体体积逐渐增大,旋翼单独工作时总气动拉力与总装后旋翼总拉力差值也在增大,艇体变体对旋翼拉力产生气动干扰,艇体变体体积增大和旋翼转速增加,气动干扰越强。为了减小旋翼与艇体之间气动干扰,可以适量延长旋翼安装杆的长度,使气动干扰减小到符合要求范围之内。
(3) 当艇体俯角一定时,艇体的阻力系数随着飞艇艇体变体的增大而增大。
(4) 当艇体体积一定时,碟形飞艇阻力系数随着飞艇飞行俯角增大而增大;当艇体俯角超过-10°时,艇体阻力系数增大幅度变大。因此,在四旋翼控制的太阳能碟形变体飞艇飞行过程中,飞艇变体尺寸需加以限制,否则阻力系数会急剧增大,旋翼气动效率较低,影响飞艇的抗风性能和飞行性能;在控制飞行时,其飞行俯角需加以限制,最好控制在-10°以内,否则其阻力会急剧增大同样影响飞行性能。
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12
舰船科学技术(2022年10期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
中国舰船研究(2022年2期)2022-04-26
计算机系统应用(2017年10期)2017-10-20
北京航空航天大学学报(2017年10期)2017-04-20
中国舰船研究(2016年6期)2016-12-12
太空探索(2016年12期)2016-07-18
云南师范大学学报(自然科学版)(2015年5期)2015-12-26
百科探秘·航空航天(2015年12期)2015-11-07