江门中微子实验中心探测器有机玻璃节点应力分析方法研究
2019-01-18 06:55马骁妍钱小辉衡月昆李华峰荆小平侯少静
西安理工大学学报 2018年4期
吴 帅,马骁妍,钱小辉,衡月昆,李华峰,荆小平,侯少静
(1.中国科学院 高能物理研究所,北京100049;2.中国科学院大学材料科学与光电技术学院,北京100049;3.北京市建筑设计研究院有限公司,北京100045)
自1930年奥地利物理学家Pauli预言了中微子的存在,提出概念之后,中微子的实验研究取得了许多重大发现,先后4次被授予诺贝尔奖。
虽然我国对于中微子的研究起步较晚,但却取得了举世瞩目的成绩。我国继大亚湾中微子实验在2012年发现中微子的第三种震荡模式之后,又展开了江门中微子实验,旨在解决三种中微子的质量顺序问题[1-3]。
中心探测器是江门中微子实验的核心探测器,该探测器结构设计以及建造方案的优劣决定了整个实验的成败。图1为中心探测器在实验厅的布局及其结构组成。

图1 中心探测器结构组成示意图Fig.1 Central detector structure diagram
该探测器位于实验厅水池中心,由外层的不锈钢网壳结构和内层的有机玻璃球结构组成,其有机玻璃球内径为35.4 m,壁厚为0.12 m,通过590根支撑杆支撑于外部的不锈钢网壳上。在不锈钢网壳的内侧,还将安装有约18 000个20 inch的光电倍增管。中心探测器工作时,有机玻璃球内将灌装20 000 t液体闪烁体(简称液闪),其密度为0.865 t/m3,探测器整体将浸没于实验厅水池内的超纯水中,超纯水密度为1 t/ m3,实验厅的温度恒定为21℃。
中心探测器主要分为两部分,外部为不锈钢网壳,内部为有机玻璃球壳。见图2,有机玻璃球通过590个有机玻璃支撑节点(简称节点)与不锈钢网壳相连接,节点在球体上沿经线方向划分为23层,中间层被称为赤道层,其余节点上下对称分布。节点主要由附加玻璃和主板玻璃组成。
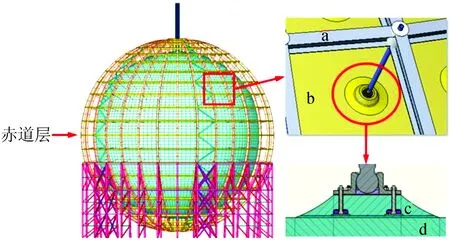
a不锈钢网壳;b有机玻璃c附加玻璃;d主板玻璃图2 江门探测器结构及支撑节点结构Fig.2 Detector structure and acrylic node structure
探测器设计时需要考虑的工况有以下四种(探测器在建造、运行过程中主要经过以下四种工况):1)结构自重工况;2)18 000个光电倍增管安装后的工况;3)液体灌装过程中(有机玻璃球内部装液闪,外部装超纯水)的工况;4)所有液体灌装完成后探测器长期工作的工况。在这些工况中,第4种工况是最恶劣的工况[4],在该工况下,由于有机玻璃球内、外液体存在密度差,整个球体受到3 000 t左右的浮力作用,因此有机玻璃球的受力成为了整个探测器设计的关键,尤其是在590个支撑节点处有机玻璃的应力水平更是需要特别关注的地方。本文基于工况4对有机玻璃节点处的应力分析方法展开了研究,通过不同建模方法的比较,确定出一种合理、可靠的节点分析方法,对探测器结构设计和受力分析起到一定的指导作用。
1 有限元模型初步建立
由于探测器自身结构及其载荷的对称性,为简化计算,本文建立1/10模型进行分析。不锈钢网壳采用B31梁单元;有机玻璃采用S4R壳单元。关于载荷,我们主要研究在工况4)下的有机玻璃应力情况。材料的本构关系均采用线弹性模型,具体材料力学参数见表1。
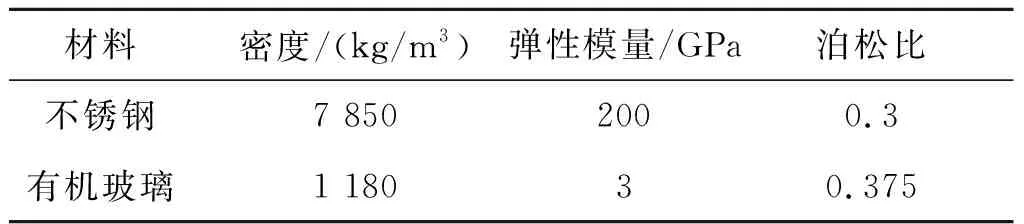
表1 材料基本力学性能指标
有机玻璃是一种质轻而坚韧的物质,在常温下具有较高机械强度,有良好的力学性能,但其拉伸强度低于其压缩强度,属于典型的脆性材料[5]。本文以第一强度理论为基准,着重研究江门中微子中心探测器有机玻璃球节点的建模方法。
见图3,采用的建模方法是有机玻璃球全部采用壳单元,由图4计算结果可知,有机玻璃球第一主应力的最大值接近9 MPa。这种模型虽然建模简单,但是最大应力出现在壳单元与梁单元连接点附近,属于典型的应力奇异点[6],应力计算不准确,故不能正确表达有机玻璃的应力水平。因此有机玻璃球全部采用壳单元的建模方法不可取,应另觅它法。

图3 有限元模型Fig.3 FEA model

图4 应力云图
Fig.4 Stress contour of central detector
2 有限元建模方法的探究
2.1 建模方法概述
通过上文分析可知,如果有机玻璃球壳全部采用壳单元模拟,则不能准确地计算出有机玻璃球壳的应力。但若全部采用实体单元建模,则不仅结构复杂、建模困难,而且单元网格数量巨大,计算量也会极大增加。由于统一单元的建模方案并不合理,因此我们不得不考虑将模型离散这种方案(节点区采用实体单元,其他部分采用壳单元)。但如何建模才能最大程度地减小离散单元带来的误差,这将是本文重点讨论的问题。本节以三种建模方法为例,在有限元软件中采用不同建模方法对节点应力进行分析,并比较其优劣,从而寻出一种最佳建模方法。
见图5,载荷按照工况4加载,该模型在赤道以上第5、6、7层采用3×3节点群进行仿真,着重研究第6层中间节点的受力情况。第1种方法采用的是挖方孔的方式,方孔边长1.8 m,第2种方法采用挖圆孔的方式,圆孔直径0.9 m(和附加玻璃的直径一致),第3种方法挖孔直径1.2 m(略大于附加玻璃直径),这三种方法交界单元的接触关系均为体壳耦合[7]。以上三种方法在建模时坐标系保持一致,单元类型设置一致,实体单元采用C3D8R,壳单元采用S4R,为了方便介绍,将这三种方法依次命名为Square、R1、R2。

a实体单元;b壳单元图5 探测器有限元模型Fig.5 FEA model of central detector
2.2 仿真结果
分别对上述三种方法进行加载计算,得到的节点第一主应力分布云图见图6。
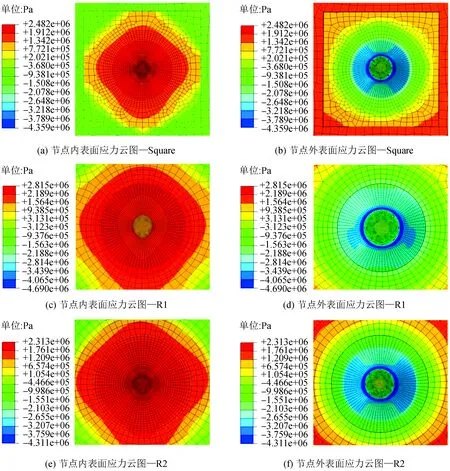
图6 不同种方法的应力云图Fig.6 Stress contour by different methods
图6中“外表面”表示节点附加玻璃一侧的表面应力,“内表面”表示节点主板玻璃内侧的表面应力,具体说明见图7。
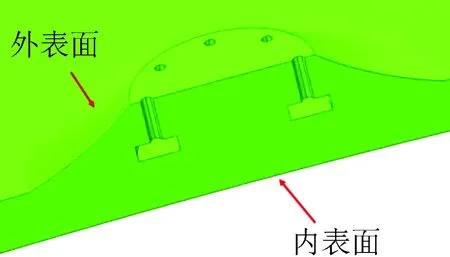
图7 节点内外表面示意Fig.7 Internal and external surfaces of the node
2.3 分析对比
由计算云图可以初步看出,R1、R2的单元过渡良好,耦合边界的色差较小,但是Square的单元过渡较差,耦合边界的色差较大。为了探究它们的差别,接下来针对每一种方法进行具体分析,以评判它们的优劣。
具体操作方法如下:沿耦合边界分别提取壳单元和实体单元的应力值,对比它们之间的差别(理论上来讲相同位置的应力值应该一致),应力差距最小的方法即为最佳建模方法。以Square为例,应力提取路线见图8,R1、R2的提取方法和Square类似,此处不再累述。

图8 Square应力提取路线示意图Fig.8 Stress extraction route diagram
计算结果对比见图9,其中实线为沿耦合边界提取实体单元各点处的应力值绘出的曲线,虚线为沿耦合边界提取壳体单元各点处的应力值绘制出的曲线。
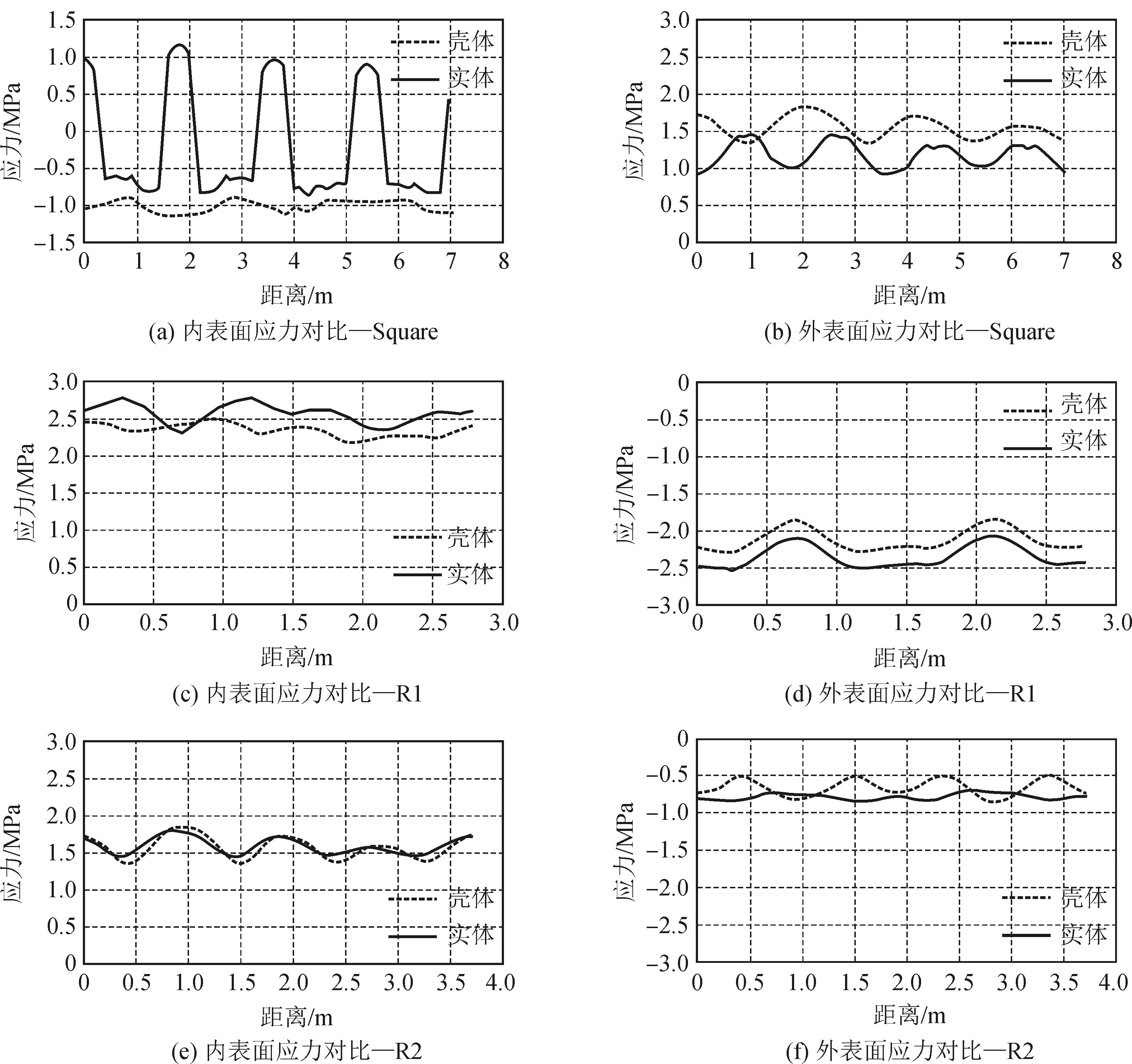
图9 应力对比Fig.9 Stress comparison
由表2中数值对比我们可以看出,Square这种方法,内表面应力的最大误差为2.8 MPa,外表面应力的最大误差为0.8 MPa;R1这种方法,内表面应力的最大误差为0.5 MPa,外表面应力的最大误差为0.2 MPa;R2这种方法,内表面应力的最大误差为0.1 MPa,外表面应力的最大误差为0.3 MPa。通过以上对比我们可以知道,R1、R2的计算效果较好,可以有效地减小离散单元带来的误差。
表2 不同方法的误差对比
Tab.2 Deviation comparison of different methods
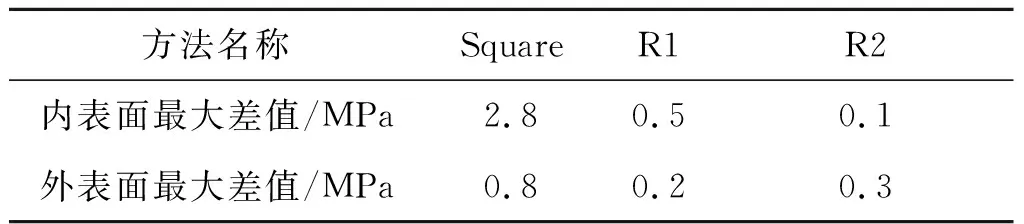
方法名称SquareR1R2内表面最大差值/MPa2.80.50.1外表面最大差值/MPa0.80.20.3
3 结 论
通过对江门中微子实验中心探测器有机玻璃球节点应力分析方法的研究,可以发现,体壳耦合且耦合边界为圆弧的这种建模方法效果较好,可以有效地减小离散单元带来的误差,较好地解决体壳组合建模问题。研究成果为优化板壳结构局部细节问题提供了参考。
猜你喜欢
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
小学科学(2019年12期)2019-01-06
电子制作(2018年17期)2018-09-28
通信电源技术(2018年5期)2018-08-23
百科知识(2016年18期)2016-10-28
飞碟探索(2015年3期)2015-09-10
知识就是力量(2015年12期)2015-09-10
三联生活周刊(2015年34期)2015-08-21