煤矿井下架空人车无人值守技术方案研究
2019-01-17 02:09王宝金
机械管理开发 2018年12期
王宝金
(山西焦煤西山煤电股份有限公司西曲矿, 山西 古交 030200)
引言
西曲矿两部架空乘人装置每年需要支付给司机24万元的工资,并经常出现误汇报、不会操作的情况,影响了乘人装置的正常运行,埋下了安全隐患。进行无人值守改造后会减少操作人员,还可以在地面实时掌握现场数据与情况,增强了架空乘人装置运行的稳定性和安全性,同时还节约工资成本。
1 矿用索道概述
矿用索道(架空乘人装置)主要用于矿井斜巷,平巷运送人员,其工作原理类似于地面旅游索道。以电动机带动减速机上的摩擦轮为驱动装置,采用架空的无极循环的钢丝绳作为牵引承载。钢丝绳主要靠尾部张紧装置进行张紧,沿途依托绳轮支撑,以维持钢丝绳在托轮间的挠度和张力。抱索器将乘人吊椅与钢丝绳连接并随之作循环运行从而实现运送人员的目的。目前,西曲矿有2.5 m架空人车、南三架空人车共两部,控制系统由采用湘潭市恒欣实业公司生产,基本性能参数如表1所示。

表1 基本性能参数
原控制系统采用矿用隔爆兼本安型控制箱、操作台、声光语音控制箱、现场传感器组成,配电采用QBZ-30、60、80、200/660(380)型矿用真空电磁起动器。系统可完成架空人车的就地开停,有比较齐全的保护功能,包括越位、全程紧急停车、过速飞车保护、欠速打滑保护、脱绳保护、配重限位保护、变坡点掉绳保护等[1]。
2 拟改增功能
1)架空人车主机可根据人员情况选择闲时自动开停功能,节省电能、减少设备磨损。
2)由调度中心可进行远程控制。
3)全程视频监控功能,可存储、查阅,可切换主画面。
4)沿线语音扩播通话功能。
5)架空人车进线配电远控制功能,配置后备UPS,实现掉电可操作。
3 自动开停功能
为了达到对上、下车点人员的可靠识别,特采用矿用本安型热释红外传感器,配合矿用本质安全型乘人传感器,可靠完成人员的到位识别以及上、下车乘人识别,完成无人值守、设备开停的可靠控制,保障设备有效节能[2]。同时配合沿线的完善保护、扩播通话及报警功能,构成完整的智能无人值守安全控制系统如图1所示。
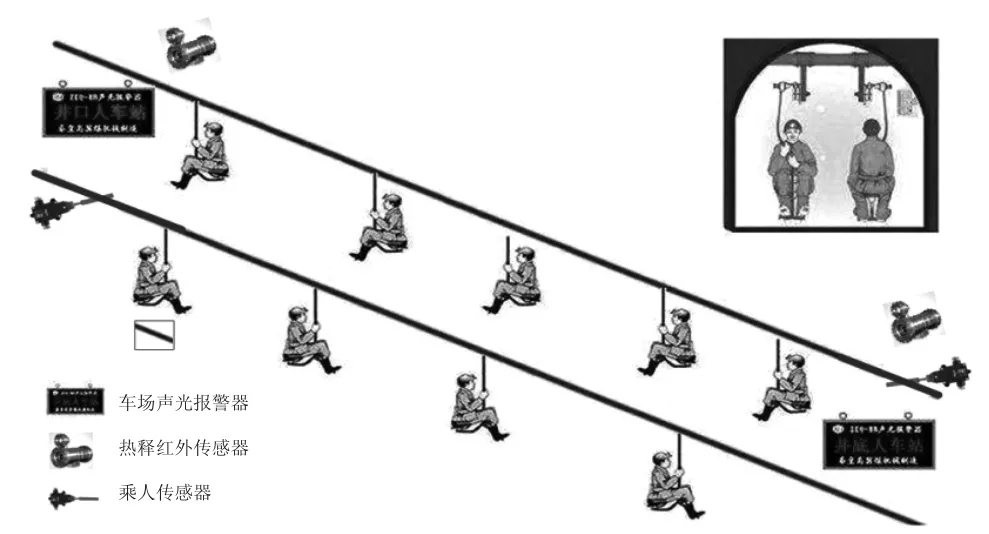
图1 “架空人车”无人值守自动控制系统
3.1 运行原理
在井底人车站端头端尾斜上方设置热释红外传感器,在端头钢丝绳下方安装乘人传感器。当系统开启无人值守模式,有人进入端头、端尾人车站时,热释红外传感器感应到人体,送信号给PLC控制系统,通过PLC控制程序开启架空人车主机及相关的辅机设备,人车开启,即可乘人,当人乘上人车后,触发乘人传感器,记录人员上车时间,有多人乘车时,同时记录人员数量。
当人员下车时,触发乘人传感器,同时热释红外传感器感应到人体,确认乘车人员已全部下车,延时停车。通过减少设备的运行时间,减少设备损耗,从而节省电能[3]。
4 调度中心远程控制
现架空人车控制系统由PLC控制箱、操作台、保护传感器等组成,PLC采用三菱FX2N,整个系统具有连续运行与间断运行两种运行模式。
1)连续运行:当上下班人员高峰时段,启动连续运行模式,24 h不间断的运行。
2)间断运行:当有零散人员上下井时,需要有司机在操作台上进行控制,当人员在机头或机尾上车点乘坐猴车,司机起动猴车,等最后上车的人下车由司机停车。
本次设计,增加调度中心电脑及上位软件,制作控制画面,因矿以太环网已经建成在用,原PLC就近接入环网交换机[4]。
当现场操作台切换到远控模式后,交由调度中心计算机进行无人值守远控,通过画面进行两种操作模式:远控连续运行模式与无人值守自动控制模式。
调度中心计算机装有控制软件,模拟现场运行界面,显示设备状态运行指示及报警画面。进行模拟操作切换,网络示意如图2所示。

图2 PLC接入方式
5 视频监控系统
西曲矿2.5 m和南三两处的两部架空人车控制系统最大工作距离343 m,拟各配置6台摄像机,头尾乘车点各安装1只、变坡点及中间安装4只。在调度中心安放27英寸显示屏,加硬盘录像机进行管理,可实时多画面显示所有位置图像。
5.1 设计原则
视频监控系统设计遵循技术先进、功能齐全、性能稳定、节约成本的原则。综合考虑现场维护及操作因素,并将为我矿今后的发展、扩建、改造等因素留有扩充的余地。本系统设计内容是系统、完整且全面的,设计方案具有科学性、合理性和可操作性。
本系统通过调度中心对现场内各监控点进行综合监控,时时动态掌握重要情况,及时处理各类警情。该视频监控系统大大减少劳动强度,减少设备运行维护人员;另外,系统的综合统筹管理可使设备按最优组合运行,在最佳情况下运行,既节能,又大大减少了设备损耗与设备维修费用,从而提高监管力度与综合管理水平。
5.2 系统架构
根据实际情况,为架空人车巷道配置一套视频监控系统,实现对前端系统的视频资源进行采集传输,方便系统控制及安全,实现远程管理。
系统前端采用隔爆型摄像机,内置光电模块,通过光纤直连环网交换机,通过调度中心硬盘录像机进行管理,显示器进行输出显示,系统拓朴如图3所示。

图3 系统拓朴示意图
6 沿线语音扩播通话系统
本次架空人车沿线根据需要设六组扩音电话,可用于沿线通话和故障报警,同时通过语音网关可与调度中心电话进行通话功能,系统设计如图4所示。

图4 沿线语音扩播通话系统
7 架空人车进线配电远控
现配电开关使用型号为BKD-400型、KBZ-200型,均为配套设备,需将控制部分接入PLC控制系统,使其具有远控功能,同时配置后备UPS,实现掉电可操作。
8 结语
进行架空乘人无人值守改造完成后,建立健全相应的制度和记录,使得管理更为规范统一,避免了很多由人为因素造成的不良影响,数据采集准确可靠,增强抽水系统的运行连续性、安全性与稳定性,同时实现减员增效的目的。
猜你喜欢
海峡姐妹(2020年8期)2020-08-25
E动时尚·科学工程技术(2019年4期)2019-09-10
电子制作(2019年10期)2019-06-17
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
电子制作(2017年17期)2017-12-18
岷峨诗稿(2017年4期)2017-04-20
制造业自动化(2017年2期)2017-03-20
凿岩机械气动工具(2016年1期)2016-11-11
中国煤炭(2016年1期)2016-05-17