内燃机车电气控制系统的研究及改进设计
2019-01-17 02:09郭瑾
机械管理开发 2018年12期
郭 瑾
(山西潞安矿业(集团)有限责任公司铁路运营公司, 山西 长治 046031)
引言
在隧道工程中,常用的牵引车有内燃机车和电力变频车两种。内燃机车是应用柴油机进行发动机的带动,实现机械能与电能的转换,再通过控制电动机实现内燃机车的运行。电力变频车是通过蓄电池的应用,实现机车的运转。随着科学技术的不断发展,需要频繁充电的电力变频车逐渐被内燃机车所替代。本文主要对内燃机车的电气控制系统进行分析,促进内燃机车的进一步推广应用。
1 内燃机车电气控制系统的分析
内燃机车是为了解决大直径隧道存在的运输距离远和运输量大的问题制造的机车。内燃机车是将内燃机作为主要的动力源,具备液压驱动与转向架等结构,在转弯半径以及轴载方面的参数值较小,适用于多种轨道。一般来说,内燃机车的制动方式是将闸瓦制动作为主要制动方式,辅以液压制动以及排气制动。目前内燃机车常用的电气控制系统为微机系统、PLC控制系统等。但是在实际的应用中,这两种系统均存在机车能源损耗大等问题。
本文将CANBUS技术作为基础,TTC60控制器作为核心,提出一种内燃机车电气控制系统的改进设计方法,能够有效弥补微机系统及PLC控制系统的不足,提高电气控制系统的有效性。在科学技术迅猛发展及环保意识增强的背景下,柴油机逐渐发展成电控模式,其余控制器之间的通信由CAN2.0的J1939协议来实现,TTC60是工程机械领域常用的专业控制器,能够为CA2N2.0通讯提供支持。因此,将TTC60控制器用于内燃机车的电气控制系统中,具有一定的优势。
以微机电气控制系统及PLC电气控制系统为例,分析内燃机车控制系统的不足,并根据以下不足进行电气控制系统的改进设计:
1)微机电气控制系统不具备恒功率控制功能,该系统不能确保内燃机车的电动机运行在规定的曲线范围内,很容易出现功率误差,导致柴油机功率加大,从而增加内燃机车的油耗,不仅浪费了较多的能源,还会造成经济损失。
2)微机电气控制系统不具备故障检测与记录功能,当内燃机车出现异常状况时,微机电气控制系统并不会进行故障的检测,不利于故障的发现与排除。因此,在进行电气控制系统的改进时,需要添加故障检测与记录功能,为运维人员的工作提供帮助。
3)PLC控制系统的不足。PLC控制系统具有非常复杂的控制电路,会应用较多的继电器和接触器等器件,很容易发生电气故障,而且电气故障的维修成本较高,且难以有效排除,导致内燃机车的控制效果不理想,影响内燃机车的正常应用[1]。
2 基于内燃机车电气控制系统的改进设计
2.1 硬件系统改进设计
内燃机车电气控制系统的改进设计包括硬件系统设计与软件系统设计两个方面。系统的控制器为TTC60,人机交互通过6.4寸的彩色LED实现,内燃机车采用负极搭铁方式通过24 V直流进行供电,发动机启动主要通过蓄电池进行供电,启动之后,发动机会带动发电机实现整车供电以及蓄电池充电。
1)硬件系统的组成。在本文改进设计的电气控制系统中,硬件系统包括TTC60控制器、LED显示屏以及发动机控制器EMR组成。系统的前向通道由信号传感器、调速手柄和操作台按钮组成;执行系统包括电磁阀、信号灯以及气动制动阀等。与此同时,系统还包括蓄电池和发电机等多种辅助设备。具体的电气控制系统如下页图1所示。
2)TTC60控制器分析。和常用的PLC控制器相比,TTC60控制器主要有如下优点:一是控制器具备更高的抗震动性与抗冲击性,更为坚固可靠,其防护等级可达IP67,能够在恶劣的环境下运行;二是TTC60控制器的接口更多,包括开光输入输出接口、0~5 V与0~30 V电压输入与脉冲输入接口、0~20 mA电流输入接口与脉冲输入接口、0~100 Ω电阻输入接口等;三是用户可以根据内燃机车的控制要求进行输入接口与输出接口的设置,还能够进行过电压以及短路保护;四是TTC60控制器共有两个CAN总线,具备较强的抗干扰能力,支持IEC61131-3标准的六种语言。
3)CAN总线设计。通过上述分析可知,TTC60控制器共有两个CAN总线,分别是CAN0及CAN1。在进行系统的设计时,CAN0能够用作TTC60控制器和上位机通信的接口,通信介质是屏蔽双绞线,应用CAN2.0B通讯协议;CAN1能够作为发动机控制器EMR的通信接口。在本文改进设计的系统中,通信的波特率都是250kb/s,CAN总线最长可进行200m的通信[2]。
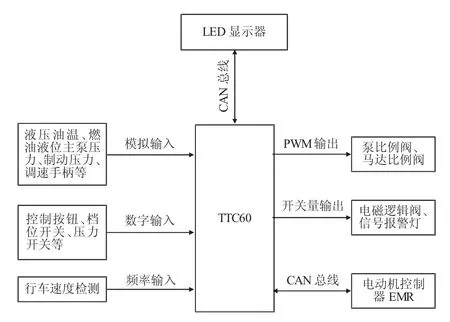
图1 内燃机车电气控制系统示意图
2.2 软件系统改进设计
软件系统可以实时展现内燃机车的运行参数,并对内燃机车的运行状况进行监控,一旦出现异常状况,系统能够立即报警。软件系统主要分为TTC60控制器的程序设计以及人机界面程序设计,控制程序是电气控制系统的关键,会对控制效果造成直接的影响。具体的软件系统改进设计如下:
2.2.1 控制程序的设计
本文应用的TTC60控制器的程序分为六个部分:发动机速度控制程序;机车牵引工况控制程序;液压系统控制程序;智能控制程序;CAN通讯控制程序与功率匹配控制程序。通过结构式方法进行程序设计,程序语言将结构化与梯形图作为核心。具体的控制程序设计流程如图2所示。

图2 TTC60控制器程序设计流程图
在内燃机车的实际运行过程中,有可能会遇到如下工况:一是内燃机车爬坡时,需要进行行车速度的提升或者加大负载,这就要求泵输入更大的功率。在这时,TTC60控制器能够将相应的指令发送给发动机,实现泵输入功率的提升;二是内燃机车的泵负载过高或者压力参数异常时,TTC60控制器能够实时监测发动机的速度,从而发出相应的指令,降低马达的速度不能够减少泵排量,避免发动机在过高的负载下出现熄火现象。由此可以看出,本文改进设计的控制器程序,能够保障发动机功率在不损耗的情况下,满足液压系统的正常运行需求,大大提高了电气控制系统的环保性能。
2.2.2 人机界面的设计
人机界面的设计要体现出高效与简洁的特点,用于检测内燃机车的运行状态及相关故障信息,还能够显示内燃机车的性能指标和相关监控数据。具体而言,人机界面的设计包括以下几方面的内容:
1)主监控页面的设计。在本文设计的系统中,主监控页面的上方用于显示电瓶的电压和燃油的液位,中间区域显示发动机的转速和内容机车的行车速度。当内燃机车出现故障时,界面中间会出现红色的标记块,通过不断闪烁进行报警。
2)IO检测界面的设计。IO检测界面的设计主要用于检测TTC60控制器所有IO点和模拟量通道的运行状态及相关参数。工作人员可以通过IO检测界面及其程序进行掌握所有控制点的实时状态,并进行相应的故障处理。
3)状态检测界面设计。状态检测主要通过电气控制系统的信号传感器进行状态数据的采集,包括系统的电压、液压系统的油温、燃油的油位、制动系统的压力、发动机马达的转速、主泵的压力以及内燃机车的牵引力等。用户可以在电气控制系统的状态检测界面进行参数的报警值设置,比如,油位的极限和系统压力的最大值等,保障内燃机车的正常运行。
4)故障管理界面设计。当内燃机车出现异常状况时,电气控制系统会立即启动报警系统,主监控页面的红色标记块闪烁,报警蜂鸣器会不断发出声音,故障报警信息栏会显示出故障报警的原因。当管理人员按下系统的复位按钮时,红色标记块不再闪烁,报警蜂鸣器不再发出声音,但是信息栏的内容会一直存在,直到内燃机车的故障被排除。另外,本文改进设计的系统还会进行故障信息的记录,为内燃机车的维护管理提供可靠的参考数据[3]。
3 结语
将TTC60作为控制器的电气控制系统,具备更低的能耗与更好的控制效果。通过分析可知,设计人员在进行电气控制系统的设计时,可将CAN总线机TTC60控制器引进内燃机车中,通过全面地设计控制程序与设计界面,为电气控制系统配备完善的硬件设施,保障电气控制系统的质量,为内燃机车的正常运行提供保障,促进隧道工程的可持续发展。
猜你喜欢
魅力中国(2021年10期)2021-05-24
装备制造技术(2020年4期)2020-12-25
昆钢科技(2020年4期)2020-10-23
活力(2019年15期)2019-09-25
铁道通信信号(2018年5期)2018-06-28
汽车维护与修理(2016年10期)2016-07-10
汽车文摘(2015年1期)2016-01-13
中国铁道科学(2015年6期)2015-06-21
小学生·多元智能大王(2015年3期)2015-05-25
汽车维护与修理(2015年6期)2015-02-28