
全球医用电动弯曲内窥镜专利技术分析
2019-01-17 02:38:56朱文韵
中国医疗设备 2018年12期
朱文韵
上海图书馆(上海科学技术情报研究所),上海 200031
引言
自动弯曲内窥镜按照驱动方式可分为电机驱动、形状记忆合金、磁场、液压/气动、电活性聚合物、压电等,电机驱动(即电动弯曲内窥镜)是通过电动机对内窥镜插入部进行驱动控制。电动弯曲内窥镜是医用自动弯曲内窥镜行业中的新技术。目前,国内研发与制造水平与日本、美国等技术领先国家尚存较大差距。
本文对全球电动弯曲内窥镜的相关专利技术进行充分解读与梳理,分析并总结电动弯曲内窥镜各部件专利技术发展演进路线,详细剖析传感器技术与机器人概念在医用电动弯曲内窥镜专利技术中的应用程度与效果。
1 数据来源
本文采用的数据主要以Thomson Innovation数据库、DERWENT WPI数据库的专利文献为基础,采集数据范围为公开日截至2017年5月31日的发明和实用新型专利(或专利申请),结合主题词和国际专利分类号(IPC)进行检索。通过对Thomson Innovation数据库、DERWENT WPI数据库的英文检索得到全球专利文献,经数据噪音去除,获取370项电动弯曲内窥镜技术相关专利(族)。由于发明专利申请自申请日(有优先权自优先权日)起18个月(主动要求提前公开的除外)才能被公开,实用新型专利申请在授权后才能获得公布(即其公布日的滞后程度取决于审查周期的长短),而PCT专利申请可能自申请人起30个月甚至更长时间才能进入国家阶段(其相对应的国家公布时间更晚),因此在实际数据中会出现2013年之后的专利申请量比实际申请量少的情况,本文分析中述及的专利技术时间均为专利申请时间。
2 技术演进分析
电动弯曲内窥镜主要部件包括插入部、驱动控制系统、操作部,为了更清晰地了解插入部的技术演进,本文将插入部细分为弯曲部与端部。
2.1 弯曲部
电动弯曲内窥镜的插入弯曲部与其他驱动类型的可弯曲内窥镜是可以通用的,因此该部件在电动弯曲内窥镜专利技术发展过程中起到的是辅助优化的作用。但是,随着电动弯曲内窥镜技术研发的不断深入,尤其是自动化、智能化程度的提升,插入部结构朝向具有辅助动力功能和连续弯曲控制两个方向不断演化升级(图1)。

图1 电动弯曲内窥镜插入弯曲部创新方向
经过插入弯曲部相关专利的筛选、研读与分析,梳理获取该部件技术发展的两个演化方向,一是具有辅助动力作用的插入部螺旋型装配结构;二是适用于电动内窥镜自动化驱动控制,可实现连续弯曲(即蛇形机器人)的柔性结构。
关于插入部螺旋型装配结构,该结构设计由日本奥林巴斯公司于2005年首次申请相关专利,并经过不断技术改进,相关研发工作延续至今[1-3]。该结构装配于弯曲部,既不影响柔性管弯曲运行,同时具有辅助动力作用,提升了插入部的插入性能。奥林巴斯公司依据螺旋结构的结构设计、装配于插入部软管的部位和螺旋结构对软管产生应力的方式三个技术改进方向。
关于适用于电动内窥镜自动化驱动控制,可实现连续弯曲的柔性结构,2005年由美国卡内基·梅隆大学研究人员提出仿蛇型运动的高度铰接插入部的专利技术,开创性地提出了分段式驱动控制的概念[4];2013年至2015年,随着自动控制技术的成熟,自动化驱动连续弯曲机器人内窥镜成为业内认同度较高的技术创新方向,日本奥林巴斯公司、美国麻省理工学院均投入相关研发工作,弯曲部的模块化、分段式结构设计中融入三维位置检测、位置传感器、分段式独立电机驱动等新技术,使得弯曲部的结构更符合内窥镜机器人化的发展趋势[5-8]。基于上述分析,电动弯曲内窥镜弯曲部专利技术演进分布,见图2。
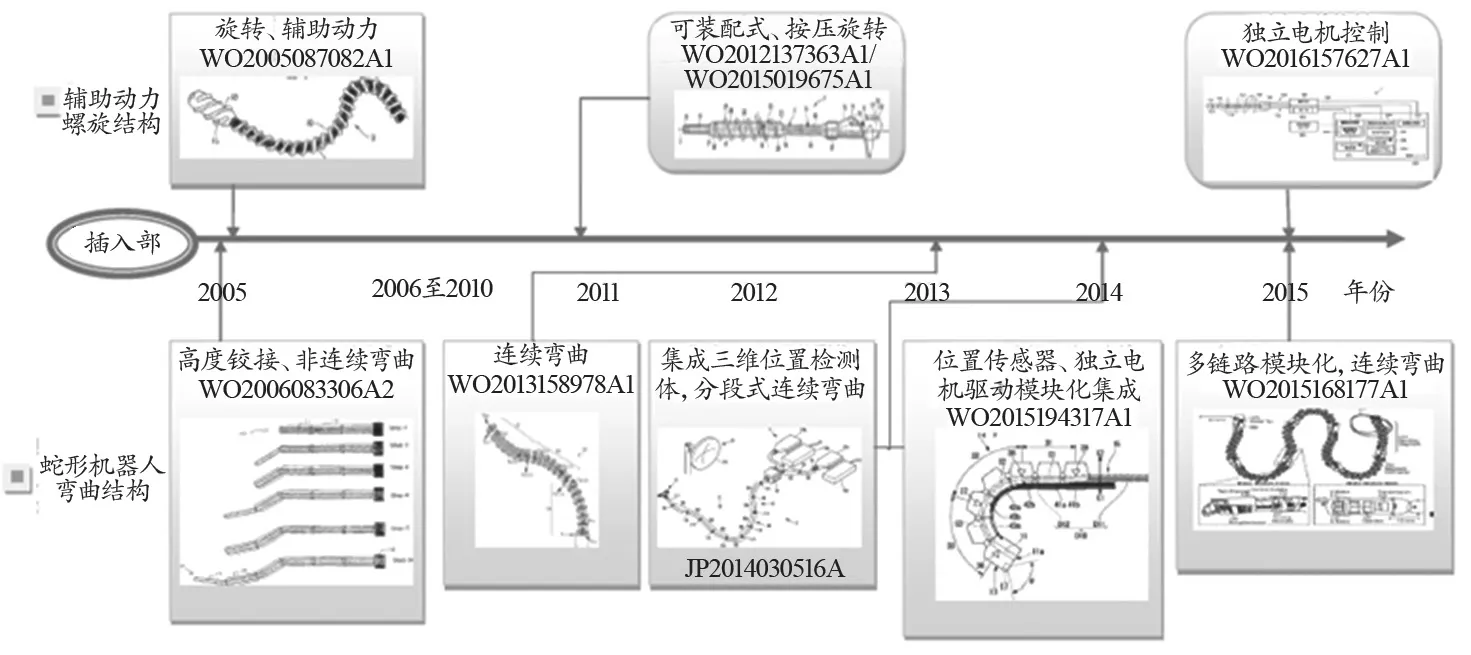
图2 电动弯曲内窥镜弯曲部专利技术演进图
2.2 端部
插入部端部虽然体积小,但是容纳了视觉系统、探测系统以实现内窥镜可视化功能,且兼具运动引导的作用,因此其结构设计和运动控制技术对可弯曲内窥镜的性能起着关键作用。本文从端部的结构和运动控制两个方面对相关专利进行分类、解读与梳理(图3)。

图3 插入部端部技术分解图
(1)端部结构:端部结构中安装有光学系统,实现内窥镜的可视功能,早在八九十年代的专利技术中即对光学系统在端部中的设置进行了设计研究,例如美国专利US5060632给出了一种具有聚焦光学系统观测窗的远端结构[9],美国专利US6047218A给出了设有成像探头及相关支撑架的端部结构[10]。此后直至2010年之后,端部结构技术取得较大进展,出现了可弯折、可伸缩的结构,提升了端部结构的灵活性,同时采用的光学系统性能更高、尺寸更小,例如专利WO2013021710A1的圆筒状可动结构,专利WO2013153448A2的具有柔性弯折功能的端部小型扫描系统以及美国专利US20140094657A1位于前端部具有弹性变形能力的圆筒式状态检测装置[11-13]。
(2)端部运动控制:运动控制技术在2003年至2013年十年间获得了较大技术进展,由基础的方向控制及信号反馈机制,例如美国专利US20040199052A1给出的铰接关节致动定向器,美国专利US20050119527A涉及的方向控制器执行装置及反馈机制。2006年之后,技术人员进一步通过提高端部多自由度运动扩大观察范围,提升手术治疗动作灵活度,例如美国专利US20080269556A1公开的具有仰俯和偏转双自由度的柔性尖端,美国专利US20070156019A1公开的以全部六个笛卡尔自由度移动的远端;2010年左右,位置引导功能和图像捕捉功能在多自由度运动技术基础上得以研发,例如专利WO2010111090A1 研发的多界标转向图像捕获功能的端部;2013年全面进入了自动化控制阶段,运动状态自动校准等技术的引入使得端部运动精确度更高,响应速度更快,例如专利WO2014123066A1开发的端部旋转状态与目标旋转量一致的控制方法[14-19]。基于上述分析,电动弯曲内窥镜插入部端部专利技术演进分布,见图4。
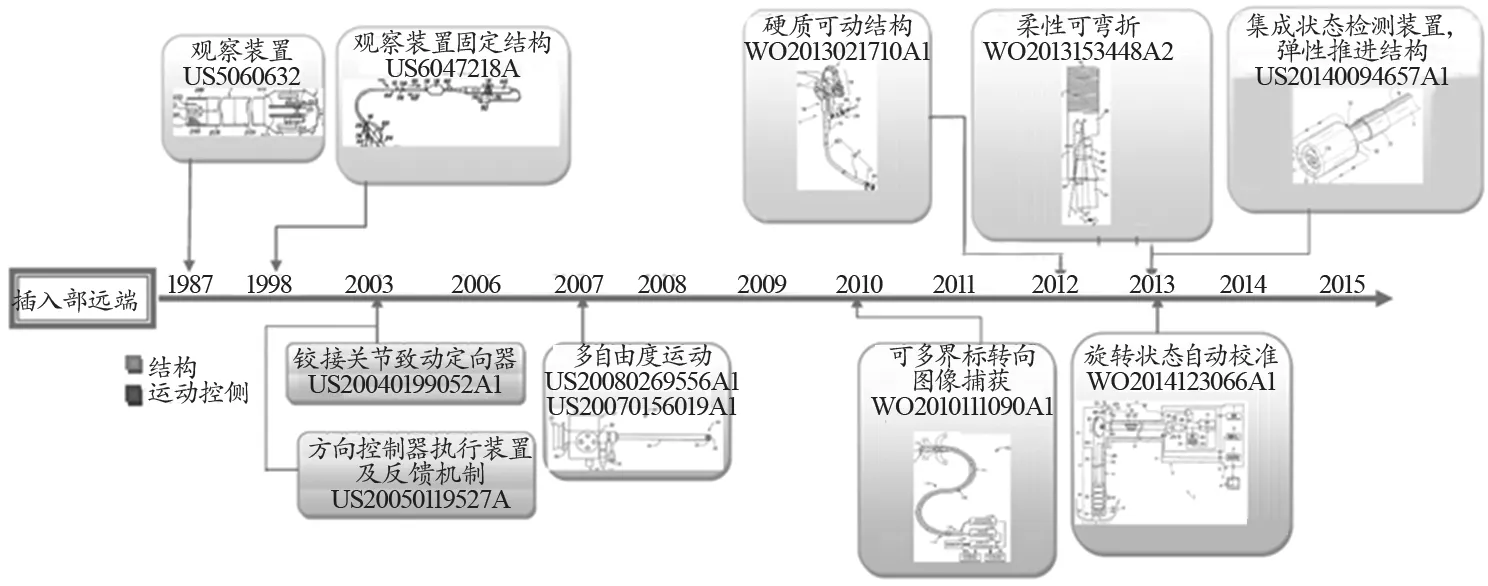
图4 电动弯曲内窥镜插入部端部专利技术演进图
2.3 驱动控制系统
驱动控制系统是电动可弯曲内窥镜的关键部件,通过相关专利的整理、解读与分析,将发明目的分成七个类别(电机型式、电机控制、弯曲角度控制、弯曲速度控制、弯曲回正控制、定位/导航、可靠性/安全性)进行梳理(图5),获取驱动控制系统的具体技术发展路径。
(1)电机型式。电机是电动弯曲内窥镜驱动控制部件相关专利中研发时间最早的技术领域,始于1975年,至2006年电机技术的技术发展阶梯特征明显,从伺服电机起步→具有限制过度弯曲的解耦电机和具有实现往复运动的可逆电机→具有弯曲量补偿功能的双驱动结构,可吸收多余驱动力缓冲装置的双驱动结构→小型内置式电机→辅助驱动装置,整体上电机驱动功能趋于完善。2006年之后,随着电机技术的成熟,相关专利技术阶梯性发展特征减弱,技术研发重点转向电机运行的控制技术。
(2)电机控制。2009年之前,电动内窥镜的电机运行控制仅限于电机本身的运行优化,2009年起,随着自动控制与传感器技术的飞速发展,电机的运行控制技术有了明显突破。例如,2009年日本富士公司提出插入部弯曲运动状态检测信号反馈控制(专利号:JP2010183949A),以及日本奥林巴斯公司关于驱动干扰信号增益调整(专利号:WO2010143715A)两项自动控制技术,有效提升了电动弯曲内窥镜电机控制效果和控制效率,为日后的该领域研究技术奠定了基础。2012年之后,以日本奥林巴斯为主的机构针对相关电机运行控制技术不断完善,但研究方向未发生重大转变[20-21]。

图5 驱动控制系统技术分布图
(3)弯曲角度控制。弯曲角度控制精度和效率是电动弯曲内窥镜关键性能体现。插入部体内弯曲运动由于肉眼无法观察,控制难度较大,影响因素较多,从1978年至2010年相关专利技术从不同影响因素出发改进弯曲角度控制技术,日本奥林巴斯公司研发并掌握每个时期最先进技术。早在70年代,奥林巴斯公司通过对弯曲部前端部分大致定位确定弯曲角度的合理性,例如德国专利DE2951764A1中利用图片明亮度分布检测结果控制弯曲角度;80年代末,奥林巴斯从体内脏器结构感应的角度对弯曲部前端进行更精确的定位,例如美国专利US4982725A利用体内压力感应检测结果控制弯曲角度,避免弯曲动作与人体器官壁的接触的失误;90年代,奥林巴斯引入自动控制技术提高弯曲角度控制的精度与响应速度,例如日本专利JP2000126120A利用电机控制位置检测与传动机构拉绳位移检测结果比值对弯曲角度智能控制;2005年至2010年,随着信息技术的成熟,日本奥林巴斯和富士建立了弯曲角度的信息数据库,研发弯曲角度计算程序,实时自动化控制弯曲角度,进一步提升控制精准度,例如奥林巴斯公司提出的日本专利JP2006192056A以将弯曲部远端弯曲位置与弯曲方向相关信息储存于储存器中,作为弯曲角度控制依据;美国专利US20110009698A中可见富士公司建立了每个弯曲角度对应弯曲部分弯曲量的信息数据库[22-23]。
(4)弯曲速度控制。弯曲速度控制技术难度明显低于弯曲角度控制,通过电机转速、力矩的控制对传动机构进行控制,从而实现弯曲速度的控制,例如美国专利US4559928A(优先权年:1989年)和日本专利JP03155584B2(优先权年:1991年)。在日本奥林巴斯公司的技术引领下,90年代初,弯曲速度控制技术即实现了自动控制,20年代中期则进入了智能控制时代。例如1991年奥林巴斯提出美国专利US5469840A提出了基于弯曲角度检测和对应电流检测结果和正常值对比结果的自动控制;2006年奥林巴斯基于弯曲指令和弯曲状态检测实现弯曲状态逻辑控制(优先权号:WO2007080954A1)[24]。
(5)弯曲回正控制。弯曲回正控制其在控制部相关专利技术中数量占比极少,回正动作操作本身技术难度较低,相关专利技术均旨在提升回正动作的精确性,例如2001年美国专利US20020165430A1的端部回正残余弯曲角度消除控制技术,2009年日本专利JP2010178886A基于弯曲部远端区域弯曲量检测的中心点位置设置[25-26]。
(6)安全、可靠性控制。该方面的技术发展主要经历两个个发展阶段,第一个发展阶段(1999年至2002年左右),从电机运行可靠的角度提升内窥镜的安全性,包括断电情况下的电机运行管理(例如,日本专利JP2001095754A),电路断路、短路预防(例如日本专利JP2001095754A),电机故障预警(例如日本专利JP2002336191A);第二个发展阶段(2003年至2012年左右),从弯曲操控异常问题解决的角度提升内窥镜的可靠性,主要涉及插入部弯曲状态异常(例如,美国专利US20040193014A,专利WO2006019137A1)、拉线松弛(例如专利WO2012153646A1)和弯曲部负载过载(例如专利WO2013180041A、WO2013179600A)三个问题的电机及控制装置应对技术[27-31]。
(7)位置/引导技术。位置/引导技术随着图像定位技术、自动控制技术、信息技术等技术的发展成为电动控制内窥镜新的研究重点,位置引导技术的掌握使得插入部动作控制的可靠性和安全性问题迎刃而解。2005年至今,相关专利技术先后引入一系列高精技术实现位置引导的精确性和高效性,技术起步点较高,发展速度较快,是引领未来电动弯曲内窥镜技术升级的立足点。从技术发展之初的光纤光栅位置传感器高精度定位(例如美国专利US20070156019A1),到之后的基于三维定位结果进一步开展插入部形状计算(例如日本专利JP2015154814A),将定位结果与方向形成映射信息实现弯曲控制(美国专利US20090149711A),目标对象的测距(专利WO2015042453A1)等位置信息的全面掌握[17,32-34]。
基于上述分析,电动弯曲内窥镜驱动控制专利技术演进分布,见图6。
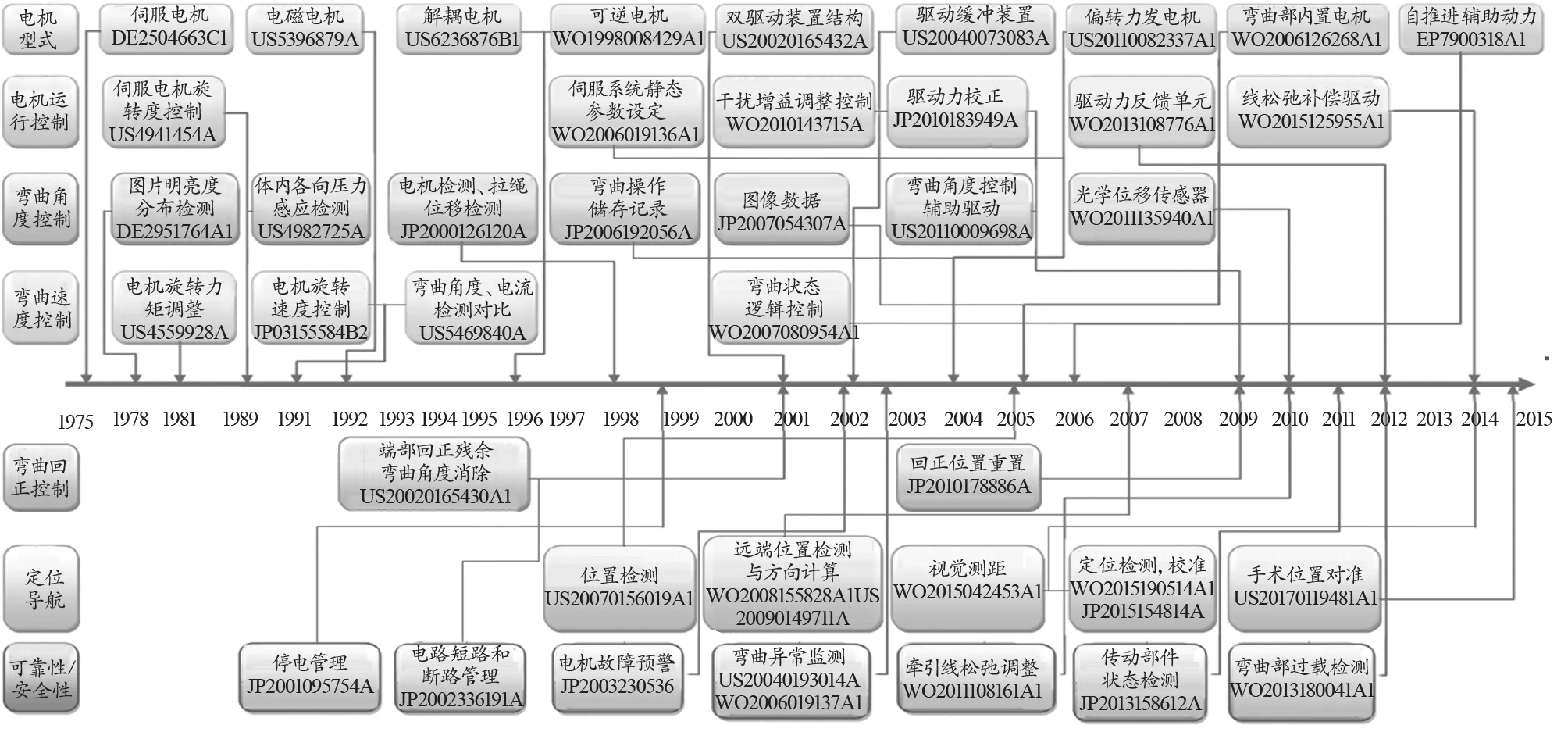
图6 电动弯曲内窥镜驱动控制部专利技术演进图
2.4 操作部
操作部技术的先进性与内窥镜手术的质量息息相关,同时对内窥镜产品的市场竞争力有着举足轻重的推动作用。经过操作部相关专利的研读、分析与整理,按照四个方面进行技术路线的梳理,分别是操作部主体型式、操作部舒适性改良、操作部安全性改进以及操作部智能化提升(图7)。

图7 操作部技术构成
(1)操作型式。操作部主体型式多种多样,结构型式整体上从机械化向自动化递进:2002年之前以开关型式为主,例如日本专利JP2002125919A公开的离合器切换操作开关,日本专利JP2003275168A公开的基于光学位置传感器信号的电磁制动开关;2003年器倾斜式操纵杆(操纵手柄)成本主流型式,例如2003年日本专利JP2005066128A公开的弯曲操控杆倾斜式操纵手柄;2005年专利技术中出现了指令输入,专利WO2006075503A1公开了基于弯曲输入指示的板状操作移动式操作元件[35];2006年奥林巴斯提出了具有通讯功能和位置定位功能的遥控操作部;2014年公开了执行插入部远端运动的关节旋转指令与弯曲指令输入部及其执行操作部。从电动弯曲内窥镜专利技术整体解读,操作部的描述中主要采用倾斜操作手柄,由此可见,遥控操作、信号输入操作被业内研发人员作为未来发展趋势,但是距离商业应用仍有距离。
(2)操作舒适性。操作舒适性主要体现在操作便利性,由单手控制过渡到任意单指操控,采用辅助应力减小操作力,各种影响操作信号提示辅助操作者决策判断,而控制动作与意图方向一致性则是从另一个方面提升操作直观性。
(3)操作安全性。从相关专利的技术内容来看,操作部的安全性主要包括三个方面:防止误操作、防止不同部件之间的脱落、密封性。防止误操作方面,例如日本专利JP2003136393A公开的操作部设置使切换力产生不连续变化的棘爪结构;防止不同部件之间的脱落问题研究相关专利研究相对较多,例如美国专利US20090030273A1公开操作杆具有弯曲运动调节部和手术器械防脱落组件,欧洲专利EP1992272A1公开一种操作部脱出限制构件和卡定构件,美国专利US20090247829A1公开的操作部与驱动部防脱离的卡定机构等;密封性方面,奥林巴斯提出了把持外壳接触区域位置变化检测的专利技术[36-39]。
(4)操作智能化。该领域的专利技术起点较高,因此专利技术发展起点较晚,为2002年,其发展的目标是减少人为因素,降低对操作者的技术水平要求,通过操作意图自动感测、操作指示信号的校正与输出、操作部与弯曲部双向通讯,实现自动化、智能化操作。
电动弯曲内窥镜操作部技术演进图,见图8。
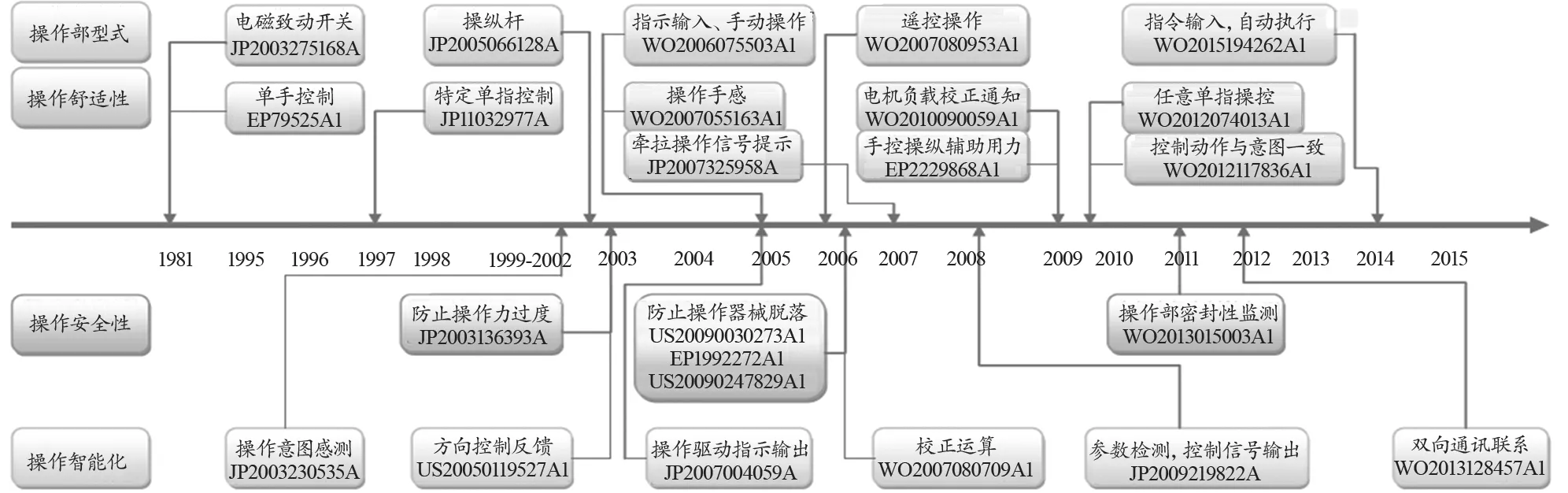
图8 电动弯曲内窥镜操作部技术演进图
3 传感器技术——实现自动化控制、智能化辅助操控决策
传感器具有微型化、数字化、智能化、多功能化、系统化、网络化特点。传感器是电动弯曲内窥镜操作者的感觉器官的延长,使用各种传感器来监视和控制治疗过程中的各个参数,使得内窥镜工作在最佳状态。专利技术中传感器的检测对象覆盖了电动弯曲内窥镜的各个主要部件,同时,可以全面优化电动弯曲内窥镜的各项技术性能。电动弯曲内窥镜传感器布置型式总结,见表1。
将专利进一步解读与梳理可知,传感器输出的检测信号转换为控制决策依据可分为三种情况:二次计算、映射关联和对比(图9)。
“二次计算”是将传感器直接输出检测信息作为已知信息,根据一定的算法计算获取未知量。例如日本奥林巴斯株式会社申请的专利US20100030023A1“能动驱动式医疗设备”,基于弯曲部位置/姿势检测结果计算外驱动力大小[40]。
“映射关联”是根据传感器检测输出结果和映射关系,两者结合实现自动控制。例如日本奥林巴斯株式会社的专利US20090149711A“内窥镜系统”[41],以弯曲部的后端附近的位置为基准位置,将使弯曲部弯曲的情况下的弯曲量和对应于弯曲量的插入部前端的三维位置即方向相关连地进行数据化得到映射信息,弯曲控制部使用映射信息来控制弯曲驱动部地弯曲驱动使得插入部前端指向作为目标的目标方向。
“检测值与极限值对比”,目的是将运行检测值控制在极限值以内,避免事故发生。例如,日本佳能株式会社专利WO2013180041A1“医疗器械”[30],包括负载探测装置用于探测作用于变形部分的负载,当负载检测单元检测到的负载大于阙值时,驱动装置断开线与驱动力之间的连接。
“检测值与标准值对比”,目的是确保检测值不偏离于标准值,确保检测对象调整至正常工作状态。例如,日本奥林巴斯株式会社专利US5469840A“具有速度控制功能的电动弯曲内窥镜”[42],包括弯曲速度控制装置,可接收由角度检测装置检测到的弯曲角度和由电流检测装置检测到的在该弯曲角度实现状态下的电流值。控制装置将弯曲角度电流值和储存器中储存的正常状态下数值进行对比。如果结果大于正常状态下的数值,则降低弯曲速度。
“不同检测输出值之间对比”,即将驱动机构与能动机构之间的同类型检测结果进行对比,获取传动运行状态的实际情况。例如,日本奥林巴斯株式会社专利WO2012153646A1“医疗控制装置”[29],其对驱动部驱动量的变化量和牵引部驱动量的变化量进行比较;根据比较结果,确定能够通过形成弯曲部的弹性部件的复原力而有助于弯曲部弯曲的范围与由于线产生松弛而不能有助于弯曲部弯曲的范围之间的边界。
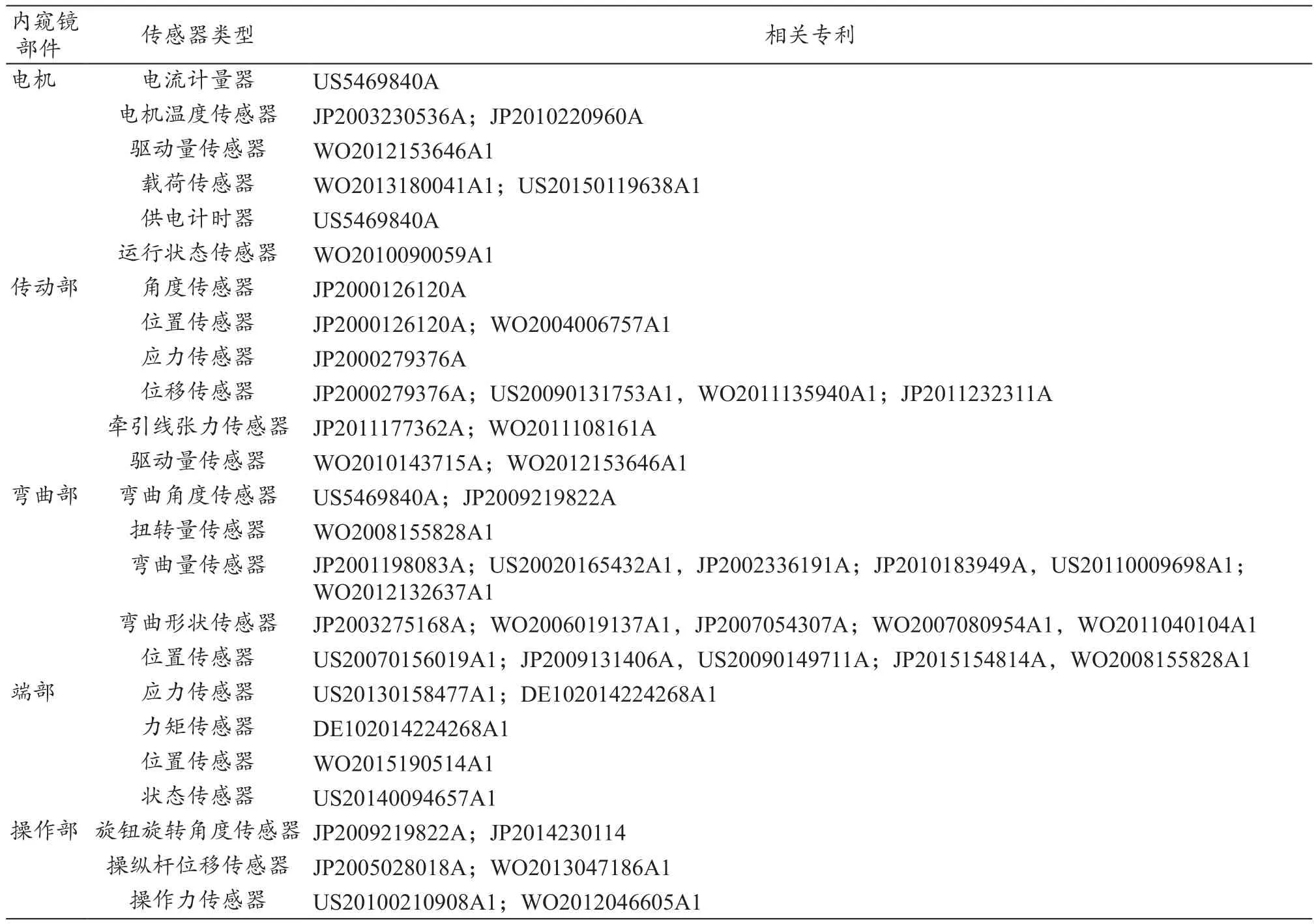
表1 电动弯曲内窥镜传感器布置型式总结
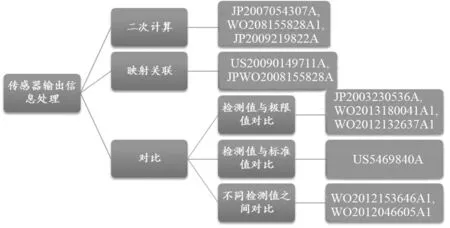
图9 传感器输出信息处理方法
4 机器人概念——有效提升操控自动化、智能化程度
机器人指能自动执行任务的人造机器装置,用以取代或协助人类工作,一般会是机电装置,由计算及程序或是电子电路控制。根据插入部可弯曲部的技术演进分析结果,机器人概念分别出现在可弯曲部和操作部的自动化、智能化提升上。
连续弯曲机器人内窥镜经过一系列的技术演进实现目前多链路连续弯曲。2013年至2015年,随着自动控制技术的成熟,自动化驱动连续弯曲机器人内窥镜成为业内认同度较高的技术创新方向,日本奥林巴斯公司、美国麻省理工学院均投入相关研发工作,弯曲部的模块化、分段式结构设计中融入三维位置检测、位置传感器、分段式独立电机驱动等新技术,使得弯曲部的结构更符合内窥镜机器人化的发展趋势。
日本奥林巴斯是唯一一家在电动弯曲内窥镜操作部智能化研发中融合机械手技术的专利申请机构,相关专利的特征如下[43-45]:① 相关专利数量仅3项:WO2015194262A1“手术用机械手操作装置和手术用机械手系统”、WO2015190185A1“机械手”和JP2015080848A“机械手系统的控制方法和机械手系统”;② 相关专利申请时间为2014年至2015年,是一项前沿技术,研发工作正处于起步阶段;③ 相关专利的地区布局上均覆盖了日本、美国、欧洲、中国等主要市场,技术布局上涉及了机械手装置结构、机械手系统结构、机械手系统的控制方法,从装置到系统,从机械结构到控制方法进行了全面的技术布局;④ 相关专利在技术效果上,操作者可多方向直观操作,操作简便,稳定性高。奥林巴斯作为行业技术的领先者和引领者,其近年来的专利布局新领域机械手技术必定是提升电动弯曲内窥镜自动化、智能化程度的有效途径,极有可能成为电动弯曲内窥镜技术升级的新突破点。
5 总结
作为下一代内窥镜技术,电动弯曲内窥镜的研发与制造尚处于发展初期阶段,以日本奥林巴斯为首的国外研发机构与制造商正在通过构筑专利壁垒抢夺市场。本文通过专利技术解读的方式旨在为国内内窥镜业内人士提供一份详尽的技术解读,帮助研发人员掌握国外竞争对手的研发方向与路径,有针对性地加快研发步伐,掌握核心技术,打破竞争对手的专利壁垒。
猜你喜欢
大电机技术(2022年4期)2022-08-30 01:38:54
汽车工程师(2021年12期)2022-01-18 06:02:43
新疆钢铁(2021年1期)2021-10-14 08:45:38
能源工程(2020年6期)2021-01-26 00:55:18
铁道通信信号(2020年10期)2020-02-07 01:01:14
冶金设备(2019年6期)2019-12-25 03:08:44
摄影之友(影像视觉)(2018年1期)2018-03-22 01:11:56
中国经济信息(2014年21期)2014-11-21 00:43:59
河南科技(2014年16期)2014-02-27 14:13:05
焊管(2013年11期)2013-04-09 07:16:50
