智能汽车虚拟实训仿真平台开发与应用*
2019-01-11 04:59:18宫唤春
汽车工程师 2018年12期
宫唤春
(燕京理工学院)
我国汽车中长期发展规划[1-2]明确指出,汽车行业向着智能化、电动化、网联化和共享化这新“四化”方向发展。随着人工智能技术的不断发展与应用,智能汽车成为研究的热点和汽车产业重点发展的目标。智能汽车技术[3]涉及车辆、电学、计算机、自动化、通信及机械等多个学科交叉融合,目前关于智能汽车实训测试的教学平台还非常少,虽然实车实验台能够满足一段时间的实验教学需求,但是随着技术的不断升级,实验台面临设备更新与改造等问题,会造成资源的浪费,因此,开发智能汽车虚拟实训仿真平台用于智能汽车实训教学是非常必要的。文章利用PanoSim软件[4-5]开发了智能汽车虚拟实训平台用于智能汽车实训教学。
1 智能汽车虚拟仿真实训平台开发
PanoSim软件[6-7]包括各类车辆系统动力学模块、三维行驶模块、道路环境模块、交通信息模块、车载感应装置模块、导航通信模块、MATLAB/Simulink可视化仿真模块、数据图像回放处理等模块集成一体的实时仿真测试的车辆虚拟系统。该软件基于车辆实验数据和物理参数建立虚拟仿真模型,利用虚拟现实方法模拟各类道路交通环境和车辆运行工况,通过PanoSim中提供的各类高精度摄像头、V2X无线通信系统和雷达装置模型,加载完成车辆动力学性能测试与仿真、车辆电控系统集成开发、ADAS系统设计与研发及道路交通信息系统感知设计与测试等多项实验项目。
根据智能汽车实训项目以及每个项目需要设置的模块,利用PanoSim创建实验流程[8]。整个实验流程为:创建实验(新建实验、选择场景、天气光照)→进入实验主界面(Forward按钮)→设置实验参数(添加实验车辆、设置驾驶信息、设置交通工况、配置传感器、配置交通元素)→启动实验(Start按钮、自动生成Simulink模型)→分析实验结果(仿真数据报表、仿真动画回放)。
1)创建实验:利用软件提供的模块创建虚拟实训项目,设置实训车辆以及各类交通道路环境,并设置干扰车辆以及交通信号装置;
2)进入实验主界面:选取相关加载实验项目,并进入参数设置界面;
3)设置实验参数:选取虚拟实训测试路面并加载车辆信息,添加横向或纵向车辆驾驶信息模块参数,加装导航与无线通信以及高速摄像头等感应装置,获取虚拟实训中交通流变化及车辆行人等干扰信息,合理设置交通信号装置及标识牌等装置,精确呈现逼真的交通运行环境;
4)启动实验:对所选实验车辆进行各项虚拟测试;
5)分析实验结果:测试结束后,利用软件提供的分析功能对仿真测试数据进行报表分析,并在分析数据过程中播放仿真测试动画,掌握车辆实验过程中动态变化过程。
图1示出智能汽车虚拟实训仿真平台系统组成图,该系统主要由摄像头、计算机显示系统、图像处理器、中央控制系统组成。它通过高速摄像头采集车辆运行时环境及道路情景等图像信号,并将信号由中央控制系统生成虚拟场景画面;在虚拟实训仿真时拍摄虚拟场景图像,实时采集各传感器数据,将数据及图像信息输送到图像处理器进行分析处理,并通过计算机显示系统呈现出车辆仿真测试路径及各种性能曲线,便于教师教学和学生分析实验过程。图1中设置的高速摄像头可以在1 ms内将路面实时信息和图像传输到中央控制系统,有效解决了信息传输延迟的问题[9]。

图1 智能汽车虚拟实训系统原理图
利用MATLAB/Simulink软件[10],教师在上课以及学生在虚拟实训过程中可以任意调取不同类型的智能车辆加载到PanoSim软件中进行虚拟测试和开发,获取实验数据和虚拟测试实时图像;通过回放功能可以了解车辆在实验过程中的运行姿态和轨迹,对改进智能车辆技术提供参考依据。图2示出智能汽车虚拟仿真平台车辆选取界面图,教师和学生可以通过双击各模块获取车辆参数信息以及算法,在线完成参数的修改和控制算法的更新,便于智能汽车技术的优化改进设计。该平台中参数设置与算法编制直观、操作简便,有利于学生了解智能汽车各系统的基本参数和算法,提高学习效率。
图2 智能汽车虚拟实训仿真平台车辆选取界面图
文章设计的智能汽车虚拟仿真平台主要由车辆模型、雷达模型和车辆自适应控制模块组成。车辆模型提供了皮卡、小轿车、SUV等常见车型,用户可将CAD格式的车辆外形文件导入系统中使用;自适应控制模块用于设置巡航车速输入信号,并将制动轮缸压力和节气门开度作为自适应控制模块的输出信号;雷达模型主要根据相对距离和相对角度判断要跟踪的目标,确保车辆安全行驶,雷达模块由毫米波雷达、激光雷达、超声波雷达组成,利用反射波信息和雷达的物理模型联合建模,高精度呈现雷达信号探测传播的机理以及模拟环境对雷达探测的影响。
文章开发的智能汽车虚拟实训仿真平台中还包括V2X(Vehicle toX)无线通信系统[11],该系统能够实现车与外界之间的信息交互,准确获取交通环境信息、路面车辆行人信息、交通信号等参数或图像,为目标测试车辆提供高效安全的驾驶信息以及车载导航信息等,降低交通拥堵率,提高驾驶舒适性。图3示出V2X无线通信系统工作原理图,该系统采用协作式传感器定义相关虚拟实训测试和车载与外界信息交互建模的应用层协议,利用车联网技术设置多个控制算法、车载交互信息的范围和处理速度,并将多个通信性能指标组合,形成综合优化仿真,确保车辆与外界信息交互的高精度与高效率。

图3 V2X无线通信系统工作原理图
2 智能汽车虚拟仿真实训平台应用
利用文章开发的智能汽车虚拟实训仿真平台在一段长500 m、宽8.5 m的单向双车道上进行智能汽车实训测试。道路交通环境中设置一辆测试车和一辆干扰车,测试车安装有激光雷达,干扰车位于测试车前方30 m处,两车初始速度为50 km/h,实验时间为10 s,测试车距离干扰车50 m时开始减速直至停止状态,测试车在AEB控制算法下完成紧急制动。启动PanoSim软件创建上述虚拟实验场景,通常操控软件控制面板设置各车辆信息、雷达模型、道路环境加载等信息,并为目标车辆和干扰车辆添加相关车速信息,具体仿真实验界面创建过程,如图4所示。启动实验时,MATLAB/Simulink会主动创建传感器模块,按照选取的传感器类型对应产生相关控制算法。教师授课时可以通过显示相关参数和算法对实训内容进行讲解,学生操作时可以在线完善算法,修改相关参数,寻找智能汽车最优设计方案,使得实训过程简单直观,利于教学质量的提升。
图4 智能汽车虚拟仿真实训创建过程
相关实训车辆参数、道路环境标志选取完成后,利用工具栏添加干扰车辆信息并设置干扰车辆车速、相关传感器参数以及控制算法,完成虚拟实验场景的布置,为后续虚拟测试奠定基础。
图5示出添加干扰车辆参数及运行环境示意图。利用图5中的工具栏可以设置道路长度、宽度、路面条件及车道等参数。对各车辆模型、雷达模型、通信系统等信息加载设置,满足虚拟实验条件后即可启动虚拟仿真实验。通过显示系统分析智能车辆运行测试,仿真结束后可以调取相关性能曲线及参数,也可以通过回放虚拟实验视频,仔细分析被测车辆运行的轨迹及外界环境对车辆的影响,为改进完善智能汽车系统提供参考依据。整个虚拟仿真过程可视化强、操控简便,易于教师授课;把智能汽车复杂的控制系统通过虚拟仿真系统准确呈现出来,有利于学生理解智能汽车的控制技术与测试方法。

图5 干扰车辆设置及运行环境加载示意图
实验结束后,可以调取相关车辆测试曲线或数据等信息,便于分析整个实验过程中车辆的运行情况。图6示出虚拟实训仿真车辆速度变化曲线,通过设置工具栏的选项获取更多车辆测试过程的曲线。分析不同阶段的性能曲线和数据有助于了解车辆在测试过程中性能和参数的变化,为优化设计智能汽车相关装置提供依据。
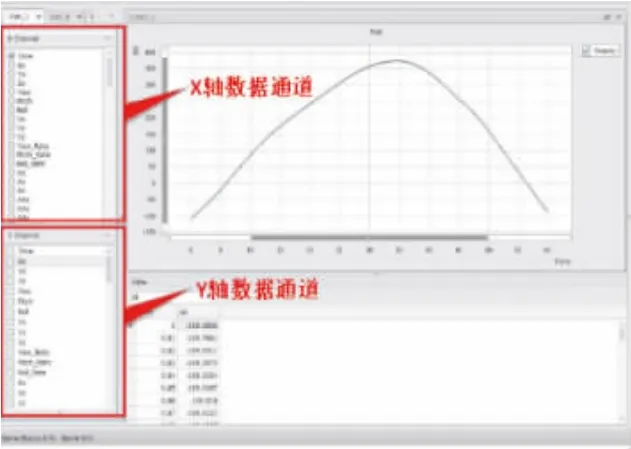
图6 智能汽车虚拟实训仿真车速变化曲线
3 结论
针对智能汽车涉及多个学科且控制系统复杂,相关实验设备和测试平台匮乏的问题,文章利用PanoSim软件建立了智能汽车虚拟实训仿真平台,用于智能汽车相关实验课程的教学。该系统包括车辆系统模型、通信系统模型、显示系统、雷达系统及道路环境模型,通过设置相关参数信息即可启动相关实验,实验过程直观、可视性强,还可以在线改变参数和算法,有利于智能汽车技术的测试和设计;创新了实践教学模式,有利于学生提高实践操作能力,为智能汽车领域的教学提供了坚实的平台。
猜你喜欢
少先队活动(2021年4期)2021-07-23 01:46:22
装备制造技术(2020年12期)2020-05-22 09:25:38
小太阳画报(2018年3期)2018-05-14 17:19:26
电子制作(2017年8期)2017-06-05 09:36:15
阅读与作文(小学低年级版)(2016年12期)2016-12-22 19:35:04
少年博览·小学低年级(2016年9期)2016-11-24 06:21:37
信息记录材料(2016年4期)2016-03-11 15:22:54
沈阳医学院学报(2015年1期)2015-12-27 13:44:40
汽车文摘(2015年11期)2015-12-02 03:02:53
医学教育管理(2015年3期)2015-12-01 06:43:16