基于电磁感应的道路车辆车型在线分类方法研究
2019-01-10 07:31叶青刘剑雄刘铮,陈众李靓
湖南大学学报·自然科学版 2019年12期
关键词:电磁感应
叶青 刘剑雄 刘铮,陈众 李靓


摘 要:广泛应用于道路车辆检测的环形线圈车辆检测器对于车辆车型的实时分类正确率较低,主要原因是面对各种车辆电磁感应特性的复杂多变和未知车型的新车辆层出不穷问题,其模式固定的分类模型难以胜任. 基于通过环形线圈时车辆电磁感应特性波形提出一种新的车辆车型实时判别方法:运用主分量分析法提取特征,采用自适应共振神经网络聚类建立车辆类别模式,动态划分各车型包含的类别模式;以半监督学习方式在线增加未知车型的新车辆模式,算法自适应新车辆的车型识别. 7种车型的道路现场实时车型识别实验平均正确率为91.3%,加入新模式自动识别后提高至92.5%;Alexnet多层卷积神经网络算法的对比实验中,训练集和测试集正确率分别为99.5%和87.1%,相差较大. 实验结果验证了本文方法在道路车辆模式不断变化情况下实现车型识别的可行性.
关键词:车辆车型;电磁感应;自适应共振神经网络;主成分
中图分类号:TP274 文献标志码:A
Research on Online Classification of Road Vehicle
Types Based on Electromagnetic Induction
YE Qing?,LIU Jianxiong,LIU Zheng,CHEN Zhong,LI Liang
(College of Electrical & Information Engineering,Information Processing and Robotics Research Institute,
Changsha University of Science &Technology,Changsha 410114,China)
Abstract:The vehicle classification correct rate of loop induction detector widely used on road is not high. The main reason is the classifier of fixed classification rules cannot cope with the changes of vehicle's complicated models and new vehicle's type classing. Based on the electromagnetic induction characteristic waveform of the vehicle passing through the loop,a new real-time discriminant method for vehicle classification was proposed. The principal component analysis method was used to extract the features. The adaptive resonance neural network algorithm was applied to cluster classification modes,these were dynamically divided into vehicle types then. For new vehicles of unknown vehicle type,new classification modes were added online by semi-supervised learning to adapt to the recognition of new vehicle type. The average correct rate of road real-time vehicle identification experiments of 7 models was 91.3%, and it was increased to 92.5% after adding new mode automatic recognition. In the comparative experiment with Alexnet multi-layer convolutional neural network algorithm, the correct rate of training set and test set were 99.5% and 87.1% respectively, which signified the existence of big differences. The experimental results verified the feasibility of the proposed method to solve the road vehicle identification problem of the change of vehicle mode.
Key words:vehicle type;electromagnetic induction; adaptive resonance neural network; principal components
智能交通控制系統通过车辆检测器采集车流量、车速等交通参数,道路车辆的车型统计也是其中重要的交通信息[1].不同车型车辆道路通行能力的当量系数相差数倍[2],只有实时检测道路上的车辆车型分布状况才能真实反映道路当前的交通状况和通行能力. 近年来,道路的车辆车型识别较多地采用基于摄像和图像识别的方法,但视频等检测技术容易受到天气、昼夜、光线变化等因素影响. 照明和天气变化严重挑战车型识别性能[3-4]. 环形线圈车辆检测器具有不论昼夜全天候工作的优势,且因其低成本、高可靠性和精度[5-6],广泛应用于道路交通监测. 但在用于车型识别方面也存在较多的问题[7]:一方面车在行进过程中会有许多难以预料的干扰因素存在,如加速、减速或停车都会使感应曲线发生畸变而导致识别错误,若避免在拥堵路段安装使用可大大减少畸变几率;另一方面我国的车辆种类繁多,新车层出不穷,车辆的感应特性并不以车型来显著区别,各种改装车更是车型难辨,而不同用途的车型划分方法也各不相同,诸多因素使得分类器难以保证长期或广泛应用下稳定的识别正确率. 因此,多年来环形线圈的车型识别功能并没有如其车辆检测功能一样得到广泛的应用. 文献[8]指出各种车辆检测器应该在鲁棒性、实时性、精度全面提高才能取得突破.
自2000年以来文献报道过多种基于环形线圈车辆电磁感应特性的特征提取和分类方法. 如基于波形的物理特征峰值、峰数等进行模糊识别[9-10];基于波形的采样特征采用BP神经网络[11-12]建立分类模型等. 文献[13]针对车辆的电磁感应特性,采用主成分分析和BP神经网络,按照轿车、中型客车、大客车、货车和摩托车5种车型,分类准确度为93.5%,是道路实验所报道的较高水平. 这些应用方法虽有不同,但共同特点一是固定车型划分数目,二是仅针对已有车型车辆样本进行有监督学习的建模而并不考虑新增车辆车型. 实际上建模采用的数据样本在车型分布上往往带有采集地特点,很难完全覆盖不同地区道路的车辆车型,不断涌现的未知车辆也可能导致原数据集训练的模型识别准确度变低. 针对数据和应用需求的多变性,本文采用自适应共振神经网络,在自动聚类形成车辆类别模式的基础上,根据需求对类别模式所属车型进行动态划分. 自适应共振神经网络ART2(Adaptive Resonance Theory II)是一种数据驱动的聚类网络,其学习和测试可以同时在线进行[14],因此对于新模式样本或不识别样本,在识别过程中调整网络,并通过半监督学方式自动学习和增加新类别模式,从而处理新型车辆和车型划分变化的问题.
1 检测原理
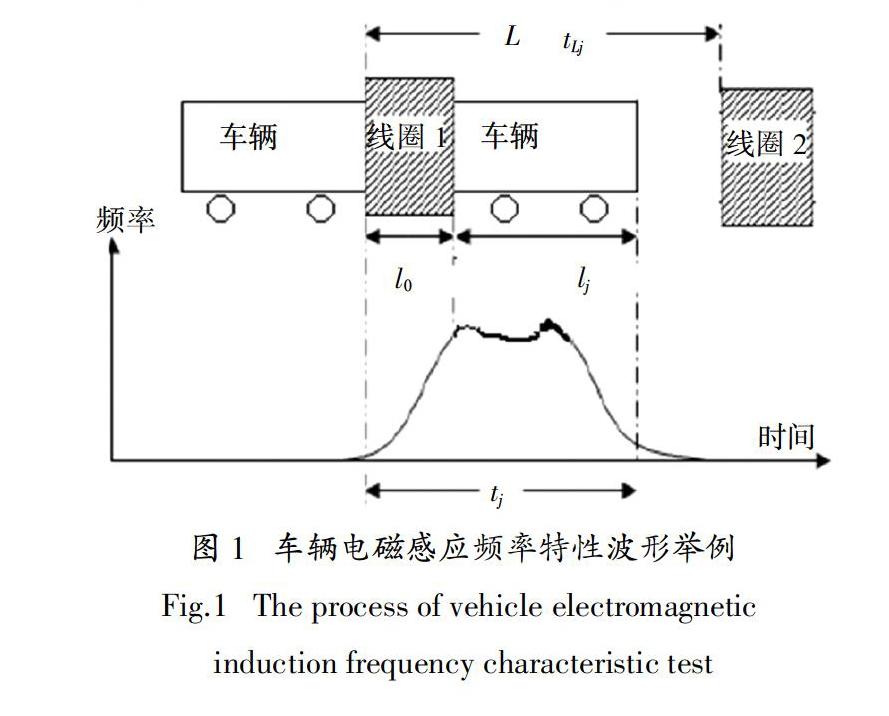
环形线圈埋在路面下浅层,将其作为电感元件与电容组成车辆检测电路中的振荡电路,当车辆通过埋在路面下的线圈时,铁质车辆使得环形线圈回路电感量改变,导致振荡电路的振荡频率变化,微处理器判断车辆到达线圈并计时用于交通参数计算,同时采集车辆通过过程中检测电路的振荡频率波形,以分析判断车辆车型.
如图1所示,给定两线圈距離L和线圈宽度l0,检测器检测出第j辆车到达两个线圈的时间间隔 tLj和车辆通过一个线圈的时间tj,则可计算第j辆车的车速和车长等. 对于环形线圈车辆检测器的基本应用来说,检测统计道路采样周期T内的各项交通参数,如车流量、平均车速等. 为检测车辆车型,在车辆通过线圈时需采集车辆和线圈之间由于电磁感应导致的振荡频率变化的过程数据. 与图2所示类似,不同类型或不同车辆的电磁感应波形存在差异,而相同结构的车辆的感应波形相同,这为通过提取波形特征进行车型识别提供了基础. 但同时,每种车型包含的车辆种类很多,其中有的波形可以有较大的差异,而不同车型间有的波形也可能有一定的相似性,也就是说同一种车型包含的类别模式可以有多个并且差异较大. 若直接以车型作为分类目标进行有监督的模型训练易产生对于样本的过拟合. 因此本质上该问题更适合基于无监督的聚类神经网络来依据
自身的相似性构成类别,进而构建分类器模型[15]. 本文应用了无监督聚类和有监督深度学习两种不同的神经网络进行比较.
2 自适应共振神经网络理论
自适应共振神经网络(ART2) 具有自学习和聚类能力,具有竞争学习和自稳学习机制. 功能上包含特征表示场F1和类别表示场F2两部分. ART2网络结构如图3所示[16],设输入样本是N维模拟输入量I =[Ii](i = 1,2,…,N),F1中的每一层有相应的N个处理单元,图中仅画出第i个单元的结构,空心圆表示神经元,实心圆表示对输入向量求模的操作. F2产生一个从F2到F1的自上而下的期望样本,建立和稳定熟悉事件对应的内部编码表示,作用是响应有关熟悉事件. F1的功能是对向量规范处理,检验期望向量v和输入向量I的相似程度,当相似度低于给定警戒阈值时,即行取消该竞争者,转而从其余类别中选取优胜者.
图3所示,I = [Ii](i = 1,…,N)是输入向量,W =[wi]、V = [vi](i = 1,…,N)是比较向量,U = [ui]、P = [pi](i = 1,…,N)是复位系统比较向量,‖·‖为欧式范数,rj、pi、si、ui、vi、wi、xi为神经元,yj是竞争获胜的输出单元,表示分类模式,F2与F1两个场之间的连接权值矩阵Wij和Wji分别表达了输出对于输入、输入对于输出的影响因子,i = 1,2,…,N,指所有输入向量的分量;j = 1,2,…,M,指所有输出单元(模式)编号, 设a、b、c、d、e、θ均为初始化参数,ρ为设定的警戒阈值,ART2网络初始化需满足的条件如下[17]:
a,b>0;0≤d≤1;e<<1;≤1 (1)
0 < ρ ≤ 1;0 < θ ≤ (2)
Wij(0) = 0;Wji′≤ (3)
网络训练算法步骤如下[18]:
1)参数及权值依照初始化条件设定初始化值.
2)输入向量规范处理.
Wi = Ii = aui,xi = (4)
3)对比度增强处理.
vi = f(xi) + bf(si),ui = (5)
f(x) = x,x ≥ θ
0,x < θ (6)
4)F2层的反馈加入,g(yi)如式(12).
pi = ui + j g(yi)Wij (7)
si = (8)
5)竞争和匹配. 当yi未被抑制时,
ri = (9)
Rj = ‖rj‖ (10)
若Rj ≥ ρ + e,匹配不成功,抑制当前的yi,Reset转到步骤2),在未抑制的 节点中继续搜寻匹配.
若Rj ≥ ρ + e
Tj = ∑N
j = 1 piWij (11)
g(yi) = d,TJ = max{Tj}
0,其他 j = 1,2,…,M (12)
只有获胜神经元J获得非零输出d,转步骤6),否则转步骤4).
若所有节点j都不能通过测试则开辟新的输出单元,并转步骤6),进行权值调整.
6)F1和F2间的连接权值调整,快速学习[14]修改获胜神经元J权值:
WiJ = (13)
[W
Ji][′] = (14)
7)返回步骤2),继续输入样本训练,直到网络输出单元稳定,训练完成,竞争获胜的输出单元即表示在设定的警戒值下的聚类结果,也表示一种类别模式,所有激活同一个输出单元的样本属于同一个类别.
可以看出,ART2网络应用到车型分类系统时,输入样本根据对于警戒值的满足状态被确定输出类别,当不满足警戒值的类别时则自动新增加类别,所以输出单元数即类别数,无需事先设定. 由于该算法的识别判断过程与学习训练过程本质是一致的,因此可设计系统在识别过程中在线增加新类别模式并记忆,同时通过半监督学习或人工标注明确该模式的车型含义.
3 车型分类器
3.1 数据预处理及特征提取
将采集的车辆电磁感应波形数据通过平滑滤波、去噪、抽样、归一化等预处理,去除车速和噪声对于数据的影响,成为等长的一维数组,采用主成分分析方法[19]进一步提取特征.
对n个样本进行主成分分析,计算相关系数矩阵R,求出其特征值λi对应的特征向量λi(i = 1,2,…,p). 设以精度q(q ≤ 1)为选择主成分的阈值,依递减序选择m(m < P)个特征值λ1,λ2,…,λm,使m个主成分累计贡献率满足式(15),对应的m个主成分作为样本的特征向量,因而完成原始数据的降维及特征提取.
≥ q (15)
3.2 网络结构
在设定精度下提取出车辆电磁感应波形的30个主分量组成数据样本,并作为ART2网络的输入量Ii = {xi}. 按照图3的ART2网络原理构造分类器,输入层含30个神经元,输出层神经元个数由网络训练后实际输出的类别模式个数决定. 按照前述ART2算法步骤编写聚类程序.
根据式(1)~式(3)给出的初始化条件设定初始化值:a = b = 10,e = 0.000 001,d = 0.95,c = 0.1. 为选择合理的警戒阈值ρ,需设定试探值进行网络训练并选择.
3.3 警戒值选择
选择合适的警戒参数ρ,是构建ART2分类器网络的关键. ρ取值不同则输出单元的个数即类别模式的个数不同,警戒值越高输出类别数越多. 通过判断分类的准确性和网络结构的稳定性来折中选择警戒阈值. 分类准确性指一种类别模式中包含的车辆只属于同一种车型;稳定性通过反复输入样本和改变输入顺序来考察样本被聚类的类别模式是否改变来衡量. 将所有训练样本输入网络,所获得的全部竞争获胜单元输出就是所有的聚类类别. 取不同警戒值进行选择实验,输入全部训练样本训练网络一次,改变输入顺序,重复实验5次取平均值,结果如表1所示. 其中正确率是可正确分类的类别中样本个数与总数之比,模式变化率是指在改变输入顺序情况下输出类别发生变化的样本数与总数之比. 表1数据并非训练网络的最终输出结果.
警戒值选择实验表明,警戒值小则正确率低;随着警戒阈值ρ增加,分类正确性和模式类别个数均增加,但取值在0.94以上的一个区间段内网络输出的单元数目及输出单元包含的模式数目变化增大,反映出对样本输入顺序更高的敏感性. 因此折中在0.88~0.94间选择试探警戒值进行网络训练.
3.4 分类器训练及结果
对于选定的警戒参数ρ,设置训练集训练的循环次数,将所有样本轮流输入,网络内部进行参数自动调整. 理想训练的情况下,输出结果满足以下两个条件时结束网络训练,得到ART2聚类网络的结构.
1)输出类别模式数量稳定,不随输入变化;
2)与样本的车型标注相比较,各类别内包含样本的车型单一.
若条件1)不满足,则继续增加循环次数. 实验表明,出现不能完全满足以上两个稳定性和准确性的条件下,有必要设定训练精度.
网络训练完成后,将各输出单元的类别模式进行二次分类,划分至其样本所属的车型,这样每个车型可能包含多个类别模式,分类器完成.
进行实验的各类典型车辆车型数据样本共935个,样本划分成7种车型[20],包括小车、中型客车、大客车、轻型卡车、大型卡车、重型卡车、拖挂车(分别对应Ⅰ、Ⅱ、Ⅲ、Ⅳ、Ⅴ、Ⅵ、Ⅶ).
在总样本集中抽取850个作为训练集,85个作为测试集,分布组成如表2所示. 重复5次,分别进行训练和测试. 以识别正确率平均值作为主要实验结果评价指标. 对于选定的警戒参数ρ,经约200次的样本集训练,网络输出稳定,但依然存在样本的车型类别划分错误. 表2所示ART2訓练错误栏中,有6种车型平均约14个样本发生类别错误,约占总样本的2%,平均正确率为98.0%,说明该聚类网络难以区分这些样本. 提高警戒值参数可能分离部分这些样本成为新的类别,但网络的稳定性损失严重,因此这些折中是必要的. 测试实验中,平均约5个样本识别车型错误,正确率为93.9%. 测试时禁止网络继续学习和调整权值.
训练的聚类结果表明,Ⅰ、Ⅱ、Ⅲ车型分别包含5、4、6种不同模式,Ⅳ、Ⅴ、Ⅵ、Ⅶ是货车车型,分别含8、9、7、6种模式.
3.5 新类别模式添加
ART2网络不同于有监督的慢逼近型神经网络,不论训练或识别,网络的工作方式本质上是一致的. 对于每个输入样本只要某个输出单元竞争成功或者增加新的输出单元,就会对该单元相关的权值进行调整,因此ART网络具有识别应用过程中新模式的添加能力,也可能带来模式的飘移问题.
为保证车型分类应用的稳定性,分类器训练完成后固定原网络结构,保证原模式的网络权值不受识别过程影响. 在遇到不识别的新车辆时采用半监督学习[21]方法建立新的类别模式,按照如下方式
进行:
1)当待识别样本与所有原模式不能匹配成功
时,激活新的输出单元即新的类别模式,按照式(13)(14)的快速学习方式进行一次新模式的权值调整并固定不再调整.
2)修改原分类器模型中输出单元数M,使得新的类别模式添加至分类器. 但待测样本在竞争时模式序号不大于M时,不计算大于M的输出单元权值作用;对于新模式同样也使得所有匹配计算保持为其产生时的结构状态,以尽量避免模式飘移现象.
3)如式(9)(10),在新样本识别过程中比较Rj(j = 1,2,…,M),将新模式归为最大值Rj对应的输出单元yj所属车型,完成半监督学习.
4 多层神经网络模型对比实验
为研究ART2神经网络构造的分类器对于该车辆车型分类问题的处理效果,采用深度卷积网络Alexnet模型进行了实验对比. 为方便运用深度卷积网络模型,将前文使用的样本数据标准化后绘制波形图,再采用深度卷积网络进行学习处理[22].
4.1 Alexnet模型
Alexnet深度网络模型主要由5个卷积层、3个全连接层以及Softmax层组成[23]. 本文采用的网络结构如表3所示,输入图片预处理为227 × 227 × 1的灰度图像,以满足Alexnet网络模型. 经过一系列的卷积与池化操作得到最终的6 × 6 × 256的特征图. 每一次卷积后经过Relu激活函数进行单侧抑制,增加稀疏激活性. 在第1、2、5次卷积后经过最大下采样的池化处理,提取显著特征.
6 × 6 × 256特征图与全连接层连接经过3层全连接层,输出为7 × 1. 其中3层全连接层之间经过Dropout处理,提高泛化能力防止过拟合. 将7 × 1的特征喂入Softmax函数,将其转化为概率形式.
Softmax(x)i = (16)
式中:xi为上层输出向量x的第i个值. 经过Softmax函数后得到y,与实际标签y′做交叉熵.
Hy′(y) = -∑i yi ′log(yi) (17)
yi与yi′分别对应y与y′标签向量中第i个值. Hy′(y)的值越小,表明yi预测得越准确. 经过反向传播算法,不断迭代更新网络参数,使得预测标签y不断逼近实际标签y′. Softmax根据输出结果转化为分类的概率,适合于处理多分类问题.
4.2 网络训练
实验的多层卷积神经网络Alexnet搭建在tensorflow框架,数据的训练集与测试集结构与前文ART2网络数据相同. 在学习率的设置初始值为0.1,衰减系数为0.92,衰减周期为10个周期. 训练过程Loss均值变化如图4所示.
经过600个周期训练后,网络损失函数Loss均值稳定且接近于0,网络训练结束.
4.3 实验分析比较
5次训练和测试的平均结果如表2 中Alexnet栏所示. 训练样本预测错误数约4.2,正确率约99.5%;测试错误数为13,正确率为87.1%.
网络训练数据的损失函数Loss接近0,训练样本分类正确率约99.5%,网络对测试集中部分车型判断正确率仅87.1%. 说明道路车辆的电磁感应波形复杂,高拟合度训练出来的多层神经网络模型未见得具有足够的鲁棒性处理该问题,对于不断出现的新车辆和新车型问题也难以应对,在车辆磁感应变化波形图分类上,单纯依靠深度卷积网络,并未达到预期效果. 训练样本有限也可能是造成深度学习失之偏颇的原因之一.
图5关于ART2与Alexnet测试正确率对比表明,本文所述方法训练分类器正确率相对Alexnet较低,但测试正确率相对较高,比较而言结合ART2聚类进行两级分类的方法更具优越性.
实验结果对比
5 现场试验
现场试验选择高速公路的一个车道,将约1.0 m×1.5 m的环型线圈埋在路面下,车辆检测装置采集车辆通过线圈过程的时间及振荡电路的频率,数据发送到上位机完成交通参数计算和车型识别等. 测试车辆392辆,采用本文所述分类器分类统计车辆车型正确率如表4所示.
Ⅰ~Ⅶ型的车辆车型识别正确率平均为91.3%,其中代表小车的Ⅰ型车辆识别正确率最高,接近98%. 卡车的正确率总体较低,究其原因,主要是卡车成分比较复杂,特别是可能有一些被改装的情况,难以有规范的波形模式. 车辆行驶时在线圈处刚好超车跨道也有可能造成漏检或波形畸变,错误分类. 实际上,实时识别的正确率与道路车辆的密度、行车规范状况有一定關系.
另有5辆车被分类器分类成4种未知的新模式,表示不属于本文分类器中可确定划分车型的模式. 按照新增模式的操作,以设定的半监督学习方法归属新模式的车型,其中Ⅱ、Ⅴ的2个模式车型共3辆车自动学习结果正确,Ⅳ、Ⅵ的2辆车型分类错误,使得各车型识别的平均正确率从91.3%小幅提高为92.5%.
具体来看,5辆车中正确判别的3辆Rj值分别为0.903、0.895、0.910,相似度比较接近警戒值;识别错误的一辆轻型卡车(Rj = 0.897)被判别为中型客车(Rj = 0.904),对应两种车型模式的Rj值都比较高并且相近,但其真实车型与识别中更相似的车型却不一致;另一辆错误识别成为重型卡车的Rj只有0.801,该车在轮轴外形上属于中型车,可能通过底盘改装具有了一些重型卡车特性,属于模式库中没有的新模式. 道路试验表明,要较大程度提高新模式的自动识别正确率,还需要对各种车辆波形特点进行更深入细致地研究,在本文分类方法中加入更多元的分析比較. 单从应用的角度出发,若通过人工辅助划分车型后自动加入分类器的模式类别库,新模式就可和其他已有模式一样,在分类器中被自动匹配判别从而提高正确识别率.
6 结 论
基于环形线圈车辆检测器进行车辆车型的在线识别分类,运用自适应共振神经网络提供的自聚类能力,首先将各种车辆波形聚类成类别模式,然后动态划分至规定车型. 提高了已有车辆分类的准确性,为层出不穷的未知新车辆提供了自聚类和半监督结合的新模式学习方式,并且新模式保持了和已训练分类器的融合,有利于检测器适应道路车辆车型的动态变化,保证分类正确率. 该方法对于处理复杂多变并且可能不断出现新模式的实时分类问题提供了一种有益的思路. 但同时对于自适应共振神经网络应用中警戒参数选定方法、模式飘移[24-25]、训练样本的影响等问题还需进一步探讨研究.
参考文献
[1] 高敬红,杨宜民. 道路交通车辆检测技术及发展综述[J].公路交通技术,2012 (1):116—119.
GAO J H,YANG Y M. Summarization of techniques and development of detection for road traffic vehicles [J]. Technology of Highway and Transport,2012(1):116—119. (In Chinese)
[2] 刘伟铭,王哲人,郑白涛. 高速公路收费系统理论与方法[M]. 北京:人民交通出版社,2000:2—40.
LIU W M,WANG Z R,ZHENG B T. Theory and method of expressway toll collection system[M]. Beijing:China Communications Press,2000:2—40. (In Chinese)
[3] 张强,李嘉锋,卓力. 车辆识别技术综述[J]. 北京工业大学学报,2018,44(3):387—391.
ZHANG Q,LI J F,ZHUO L. Review of vehicle recognition technology [J]. Journal of Beijing University of Technology,2018,44(3):387—391. (In Chinese)
[4] YANG Z,PUN-CHENG L S C. Vehicle detection in intelligent transportation systems and its applications under varying environments:a review [J]. Image and Vision Computing,2018,69:143—154.
[5] LIU H X,SUN J. Length-based vehicle classification using event-based loop detector data [J]. Transportation Research Part C,2014,38:156—166.
[6] LAMAS J J,CASTRO P M,DAPENA A,et al. Multi-loop inductive sensor model for vehicle traffic applications [J]. Sensors and Actuators A Physical,2017,263:580—592.
[7] 曹国辉.车辆特征提取方法综述[J]. 中国水运(理论版),2006,4(3):125—126.
CAO G H. Survey of vehicle feature extraction methods [J]. China Water Transport (Theory Edition), 2006, 4(3): 125—126. (In Chinese)
[8] 孙凌红,窦文娟. 车辆检测技术专利技术综述[J].中国新通信,2015,17(5):125—126.
SUN L H,DOU W J. Overview of patent technology of vehicle detection technology [J]. China New Telecommunications,2015,17(5):125—126. (In Chinese)
[9] GAJDA J,SROKA R, STENCEL M. A vehicle classification based on inductive loop detectors [C]// Proceedings of the 18th IEEE Instrumentation and Measurement Technology Conference. Piscataway,NJ:IEEE,2001:460—464.
[10] SROKA R. Data fusion methods based on fuzzy measures in vehicle classification process [C]// Proceedings of the 21st IEEE Instrumentation and Measurement Technology Conference. Piscataway,NJ:IEEE,2004:2234—2239.
[11] GAJDA J,STENCEL M. A highly selective vehicle classification utilizing dual-loop inductive detector [J]. Metrology and Measurement Systems,2014,21(3):473—484.
[12] KI Y-K,BAIK D-K. Vehicle classification algorithm for single loop detectors using neural networks [J]. IEEE Transactions on Vehicular Technology ,2006,55(6):1704—1711.
[13] META S,CINSDIKICI M. Vehicle classification algorithm based on component analysis for single-loop inductive detector [J]. IEEE Transactions on Vehicular Technology,2010,59(6):2795—2805.
[14] FAN J,SONG Y,FEI M R. ART2 neural network interacting with environment [J]. Neurocomputing,2008,72:170—176.
[15] AlIA J B,SAIDIA L,HARRATHA S,et al. Online automatic diagnosis of wind turbine bearings progressive degradations under real experimental conditions based on unsupervised machine learning [J]. Applied Acoustics,2018,132:167—181.
[16] CARPENTER G A,GROSSBERG S. Self-organization of stable category recognition codes for analog input patterns [J]. Applied Optics,1987,26(23):4919—4930.
[17] CARPENTER G A,GROSSSBERG S. The ART of adaptive pattern recognition by a self organization neural network [J]. IEEE transActions on Computer,1988,21(3):77—88.
[18] CARPENTER G A,GROSSBERG S,ROSEN D B. ART2-A:an adaptive resonance algorithm for rapid category learning and recognition [J]. Neural Networks,1991,4(4):493—504.
[19] SHEN Y C, YE Q. Clustering of vehicle waveform based on principal component analysis and neural network [C]// Proceedings of 2010 International Conference on Measuring Technology and Mechatronics Automation. Piscataway NJ:IEEE,2010:792—796.
[20] 孟順. 我国车辆分类方法的演变[J].汽车工业研究,2018(3):36—43.
MENG S. Evolution of vehicle classification methods in china [J]. Auto Industry Research,2018(3):36—43. (In Chinese)
[21] 刘建伟,刘媛,罗雄麟. 半监督学习方法[J].计算机学报,2015, 38(8):1592—1612.
LIU J W,LIU Y,LUO X L. Semi-supervised learning method [J]. Chinese Journal of Computers, 2015, 38(8):1592—1612. (In Chinese)
[22] 常炳国. 一种基于网络学习的图像特征融合新方法[J]. 湖南大学学报(自然科学版),2011,38(12):62—65.
CHANG B G. A new method of image character fuse based on natural network learning [J]. Journal of Hunan University (Natural Sciences),2011,38(12):62—65. (In Chinese)
[23] 宋青松,张超,田正鑫,等. 基于多尺度卷积神经网络的交通标志识别[J]. 湖南大学学报(自然科学版),2018,45(8):131—137.
SONG Q S,ZHANG C,TIAN Z X,et al. Traffic sign recognition based on multi-scale convolutional neural network [J]. Journal of Hunan University (Natural Sciences),2018,45(8):131—137. (In Chinese)
[24] 陈众,莫红. ART2wNF及其稳定性--可塑性动态平衡性能分析[J].自动化学报,2013,39(8):1381—1388.
CHEN Z,MO H. ART2wNF and its stability-plasticity dynamic trade-off analysis [J]. Acta Automatica Sinica,2013,39(8):1381— 1388. (In Chinese)
[25] LIN H F,GAO C,SONG Y Z. An improved ART2 neural network resisting pattern drifting through generalized similarity and confidence measures [J]. Neurocomputing,2015,156:239—244.
猜你喜欢
求学·理科版(2021年1期)2021-02-04
中学生数理化·高二版(2017年3期)2017-07-07
中学生数理化·高二版(2017年3期)2017-07-07
中学生理科应试(2016年5期)2016-10-21
中学物理·高中(2016年8期)2016-08-08
中学生数理化·高三版(2016年5期)2016-05-14
物理教学探讨(2009年10期)2009-07-23
中学生数理化·高二版(2008年6期)2008-11-12
中学生数理化·高二版(2008年2期)2008-10-19
中学生数理化·高二版(2008年2期)2008-10-19