基于模型的舰艇火灾红外超早期探测方法
2019-01-08 01:56,
船海工程 2018年6期
,
(中国船舶重工集团公司第七二六研究所,上海 201108)
舰艇火灾发展初期阶段是舰艇火灾防治的关键时期,其火灾探测性能对后续火灾扑救具有重大影响。为获得良好的舰艇消防安全保障,需要在火灾发生的初始阶段,即在异常故障或热解阶段及时进行有效的预警、报警,以及必要的灭火联动,以求在发生损失前消灭火险。
国内专门针对舰艇火灾特征及应用的研究开展较少,对于舰艇火灾超早期探测技术的研究尚属起步。文中提出了一种基于热成像分析原理的火灾超早期探测方法,以提高对舰艇高风险区域的保护,为实现智能化异常预警、早期报警以及快速灭火联动的目标奠定技术基础。首次提出基于模型设计的红外系统硬件在环(hardware-in-loop, HIL)[1-2]设计平台,实现了一种应用基于模型的系统工程(MBSE)[3]及基于模型的设计(MBD)[4]的系统开发方案。通过焦平面红外系统的数字化设计过程,可以大幅提高舰艇火灾超早期探测系统的研究和开发能力。
1 研究目的
舰艇火灾的发展分为4个阶段:初始阶段、可见烟阶段、明火阶段和剧烈燃烧阶段[5]。根据每个阶段的燃烧特性及防护要求,分别选用不同类型的火灾探测器。火焰探测器适用于探测明火阶段和剧烈燃烧阶段火情,红外光束感烟探测器用于探测可见烟阶段后期和明火阶段的火情,点型感烟、感温探测器探测的是初始阶段后期和可见烟阶段的火情。见图1。
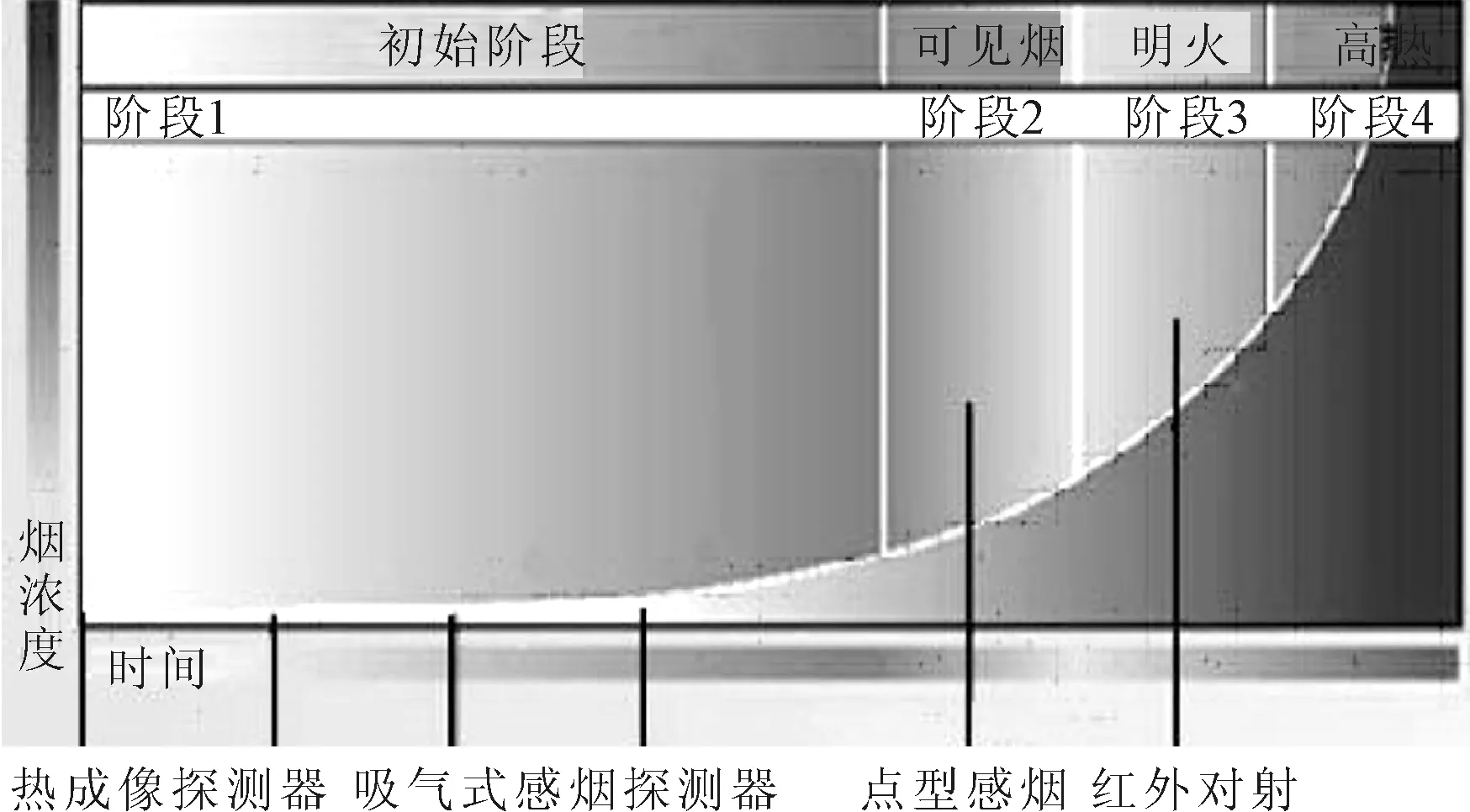
图1 各类探测器性能比较
火灾探测方式由于工作机理的限制,都依赖于火灾烟气羽流扩散,只能对火灾中后期(可见烟、阴燃火)、早期阶段(可燃分子相变)的现象产生响应,适用于一般场所的应用需求。在舰艇环境下,火灾风险多、发展快,火灾形式可能会表现为瞬间突变,即在潜伏期(初始阶段)过后突然发生明火或爆炸,若未能在早期发现异常,在后期普通探测设备即使发生报警,损失也已形成。
舰艇火灾红外超早期探测技术是一种比较好的技术途径,可以大幅度突破传统探测设备的限制,在很大程度上满足舰艇消防的需求。通过监测目标物体内能(温度)的分布及变化,特别是针对处在工作状态的重要设备,实现对目标设备异常状态(不正常的内能聚集、温度上升及扩散过程)的实时监测和判别,在事故酝酿阶段即能够察觉。
2 国内外研究现状及趋势分析
目前,军用舰艇超早期探测技术只有少数发达国家在进行研究开发,研究方向如下。
1)注重从系统层面将多种功能进行集成的研究思路。将热图像、通讯、定位、火场分析等舰艇火灾探测所需的功能进行系统设计,采用系统工程学理念,在实现多种功能的同时充分考虑实际使用的特殊要求。
2)注重设备性能参数的场景优化。由于消防探测设备的特殊使用环境,要求其具有高稳定性和可靠性,国外对于消防探测设备的研究通常以最终应用环境为研究出发点和目标,对所研制设备的功能模块及整机性能进行优化。
美国国家标准技术研究中心(NIST),自2005年以来进行了一系列研究实验,分别通过小尺寸模拟台和实景模拟的方法,对不同火源、场景,以及不同灭火方式下民用消防探测热像设备的性能进行分析和评定,以建立符合实际应用要求的行业标准,并在2010年形成ANSI/NFPA 1801-2010标准。
国内对于早期探测报警技术的研究,大部分着眼于烟气产生早期。具有较高集成度以及火场环境适用性的早期探测技术在国内还没有相关研究,使得现有技术在面临火灾风险较高的严峻挑战时,产生功能失灵等严重故障,导致战机延误而造成严重损失。
红外热像技术从上世纪末诞生以来,其应用领域持续扩展,从起初的国防、电力领域,正逐步扩大到医疗、安防、化工、电子等行业[6]。随着其应用范围的不断拓展,使得新领域的未知问题不断涌现,问题的复杂程度不断升级,应用的智能化要求不断提高,对热像设备的特殊需求和特性约束不断增加。针对特定问题的具体解决方案个性化明显,无法大批量生产,使得研发机构越来越难以平衡研发成本和市场价格竞争之间的矛盾。红外热像技术作为可见光谱范围外一种视觉化感知周围世界的方式,其面向未来智能制造和智慧城市的应用需求很大,正如所有面向未来发展的技术所面临的现实问题一样,现代红外热像系统正变得越来越复杂,研发难度也越来越大。因此,怎样才能适应未来智能化、模块化、小批量的发展要求,构建一种快速、高效、质量可靠的产品开发系统,就成了必须要解决的核心问题。
未来的红外热像设备将变得更复杂、更智能,意味着红外热像设备需要更加精确的功能定义,更灵活的系统架构以及更复杂的软件算法。如果采用传统的开发模式,应用需求与系统实现之间将会存在着巨大的鸿沟。产品设计问题越晚发现,则进行修正的成本就会越高(甚至呈指数上升)。目前红外焦平面设备的开发模式无法摆脱硬件对软件开发的束缚,设计中产生的软件实现(算法代码等)都需要在实际硬件中运行才能完成最终调试和测试,使得研发工作呈先硬后软的串行模式,导致很多设计问题只有在硬件基本形成后,进行子系统级(系统-子系统-部件-组件-零件)调试时才被发现(甚至更后期才能发现),对产品的研发成本、交付时间产生极为不利的影响。在对设备功能进行扩展或需求变更时,传统开发方法一般是修改数据类型,提取接口,直接对代码结构进行改造,需要手工编码和调试。这就使得开发效率受开发人员能力的限制,在开发过程中很可能产生引入版本混乱的问题,甚至是潜在的软件缺陷,造成严重的质量问题[7-8]。
目前,基于模型的系统工程(MBSE)和基于模型设计(MBD)的开发技术,有助于实现系统模型快速搭建、自动代码生成、算法仿真与自动化测试以及产品设计交付等功能[9],能够大幅降低研发工作量与开发风险,并且使产品设计与产品生产、产品使用及维护等整个产品生命周期的各个环节有机衔接,可以在一定程度上解决红外热像设备开发遇到的现实问题。
3 总体设计方案
在红外超早期火灾探测方法研究中,应用红外热像等前沿技术,满足舰艇火灾安全超早期预警和报警的需求;采用非制冷红外成像及热检测技术作为技术途径,监测船舶环境中容易引发火灾的风险源,如电气柜、轮机、各类管线等。对于故障导致的突然发热,或者热分布的异常变化等故障的前期表征,可以被及时发现和判别,实现超早期火灾预警和报警的功能。
非制冷红外热像系统由光学镜头模块、红外传感模块、偏置电源、控制模块,以及信号处理模块构成,见图2。光学镜头模块用于过滤光谱以及构造光路,将视场范围内的属于特定光谱范围内的红外光线聚焦于红外传感模块;红外传感模块用来实现从红外光信号到电信号的变换,并根据特定的时序关系将电信号传输到控制模块和信号处理模块;控制模块和信号处理模块进行系统的时序控制以及信号算法的运行,并通过控制和数据接口与其他设备连接,是整个系统的核心部分;电源模块将电源输入进行变压、稳压后送至各电子模块,以提供其正常工作所必需的偏置电压。
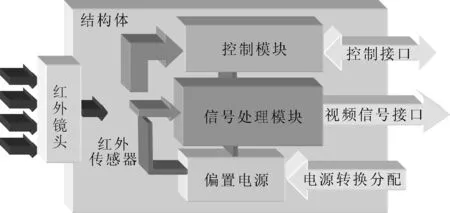
图2 非制冷红外成像及热检测系统构成
非制冷红外成像及热检测技术的系统构成相对固定,对于不同的应用环境、目标任务以及使用场景,具体的技术实现会有较大的差异,需要根据系统的具体要求,开发符合其特点的技术实现方法和系统架构。
在以研究舰艇火灾红外超早期探测方法技术的基础上,还需要在开发过程中引入新方法、新技术,应对目前红外系统研发中,软硬件开发过程相互制约,研发周期长的问题。需要保证系统具有较好的可扩展性,以应对红外系统行业内硬件同质化严重,竞争力日趋体现在软件和算法的趋势要求。
为解决以上问题,进一步提高研发竞争力,引入了比较前沿的基于模型的系统工程(MBSE)和基于模型的设计(MBD)研发理念,采用螺旋增量开发模型(迭代V模型),建立一种可以覆盖“设计-仿真-实现-测试”全开发周期的红外热像系统半实物硬件在环(HIL)系统作为原理样机,作为后续技术和产品开发的研发及测试平台。该系统平台完全满足项目任务书中内容和指标的要求,有利于红外系统算法的设计能力和系统的实现能力,大幅提高研发效率。
红外系统HIL平台能够基于一定的硬件资源,为UFPA提供必要的偏置电压和工作时序,实现对非制冷焦平面阵列器件(UFPA)的驱动,获得红外视频信号数据,并在监视器上进行显示,将信号数据通过以太网数据链路与开发终端的工作环境进行连接,以支持开发人员开展基于模型的开发(MBD)过程,实现图像增强算法、温度测量算法以及故障检测及报警算法的设计和仿真工作,当算法设计满足系统设计要求后,算法设计可以进行自动代码生成并与手工代码进行集成,再通过以太网数据链路或USB Blaster串行连接将算法加载到目标硬件,通过硬件资源的运行来测试系统设计,完成系统设计工作。
系统平台的硬件资源,包括红外镜头、红外器件(UFPA)、红外目标(用于标定及测试)以及硬件开发目标板等部分。
硬件开发目标板采用SoC架构,通过单片SoC器件提供的ARM多核微处理器(HPS)及FPGA可编程资源的作为系统实现的核心,运行操作系统实现对资源管理和过程控制。同时,目标板还包含高速存储器、通用IO以及必要的数字信号处理资源,共同构成比较完整的在线可配置硬件资源[10-11],见图3。
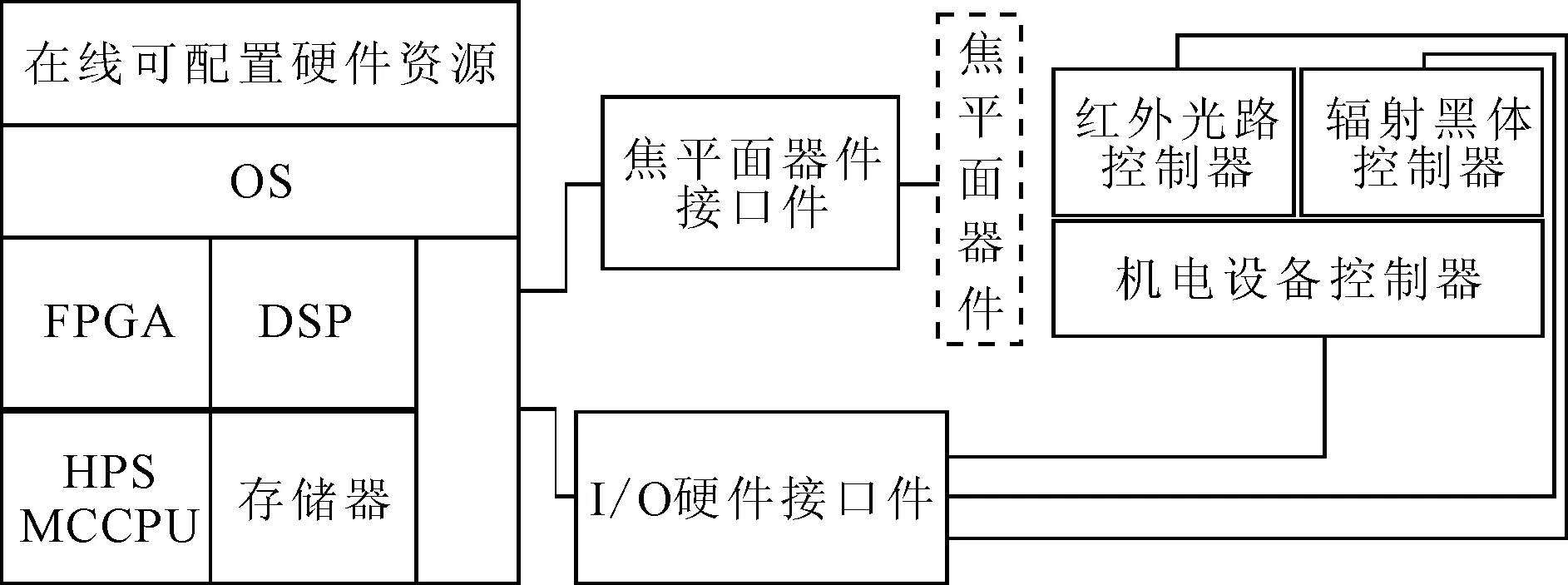
图3 在线可配置硬件资源
基于以上硬件资源的支持,典型的硬件资源配置,见图4。系统平台应用HPS多核微处理器作为控制端,在系统启动时自动配置FPGA资源,通过对FPGA资源的配置,产生UFPA Controller模块,Data RW Controller模块,Onchip RAM模块,以及FPGA DDR3桥接模块。UFPA 控制模块通过GPIO接口与外部资源连接,负责配置UFPA工作电压,提供UFPA工作时序,并根据时序关系采集相应的传感数据,实现系统所需的各种算法。Data RW Controller数据读写控制模块,负责两部分工作:①通过DDR3桥接器读写算法运算所需图像数据;②控制数据按照奇偶帧的乒乓顺序分别存入Onchip RAM片上存储模块1或片上存储模块2。HPS控制端内嵌ARM Cortex-A9 双核微处理器,系统启动后自动加载嵌入式Linux操作系统及驱动程序,运行系统平台应用程序后,由Core 2 内核2运行程序,通过Lightweight HPS to FPGA Bridge桥接器读写FPGA端的Data RW Controller模块以及UFPA Controller模块中的控制寄存器,实现对其行为的控制,通过HPS to FPGA Bridge 高速桥接器按照乒乓时序将数据写入DDR3存储器。Core 1 内核1上运行程序,监听特定IP地址的以太网端口,当开发终端发起会话请求时,与开发终端建立连接,并通过TCP协议将数据经千兆以太网传输至开发终端。
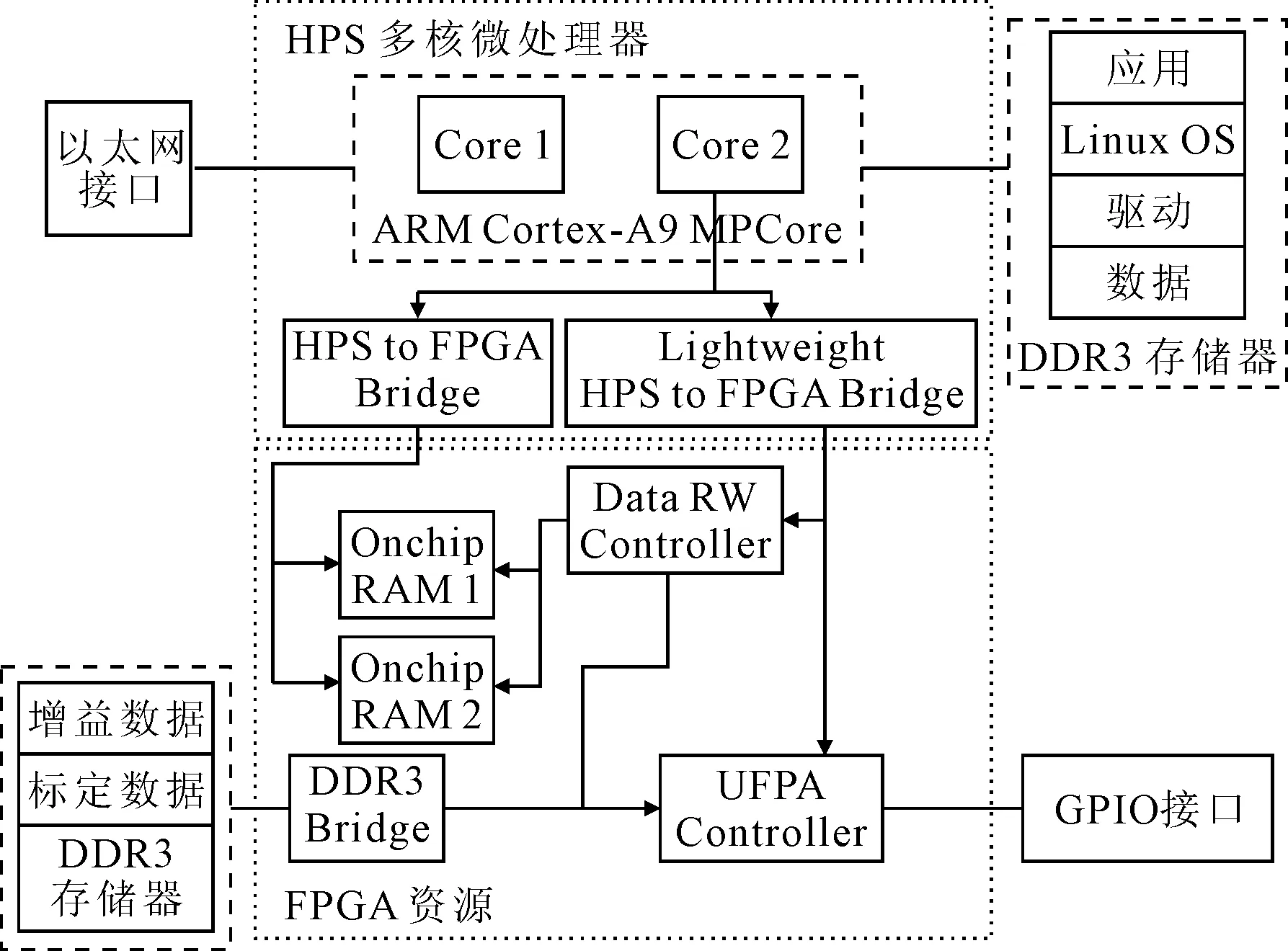
图4 硬件资源典型配置
红外系统硬件在环HIL开发和测试平台模型的开发过程见图5。
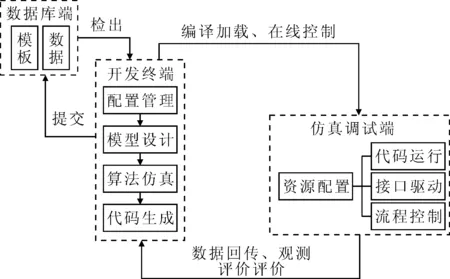
图5 系统HIL平台开发过程
在开发终端包含了开展本地开发所需要的所有工具,开发人员可以进行本地配置管理、模型设计、算法仿真、代码生成等工作。通过与数据库的交互,开发终端可以从数据库中获取开发所需的输入文件(设计需求、模型模板、算法模板等),指导和帮助设计工作高效开展。当设计的产品组件完成、仿真、调试、测试等工作后,可以将设计输出文件(算法模型、设计文档、测试报告等)提交至数据库单元,作为一下阶段设计开发的输入文件或项目数据归档使用。通过建立远程开发会话,开发终端可以将硬件配置文件分发到目标硬件资源,完成存储器初始化和接口驱动,部署系统算法代码到可用资源,启动仿真测试过程,控制相应的硬件资源以完成测试过程(图像算法测试、温度标定、NETD测试等)。同时,整个测试调试过程中,开发终端可以观察、保存在线回传的数据,对测试过程中重要参数(偏置电压等)进行调整。
系统平台开发基于分层架构,采用螺旋增量开发模型,见图6。
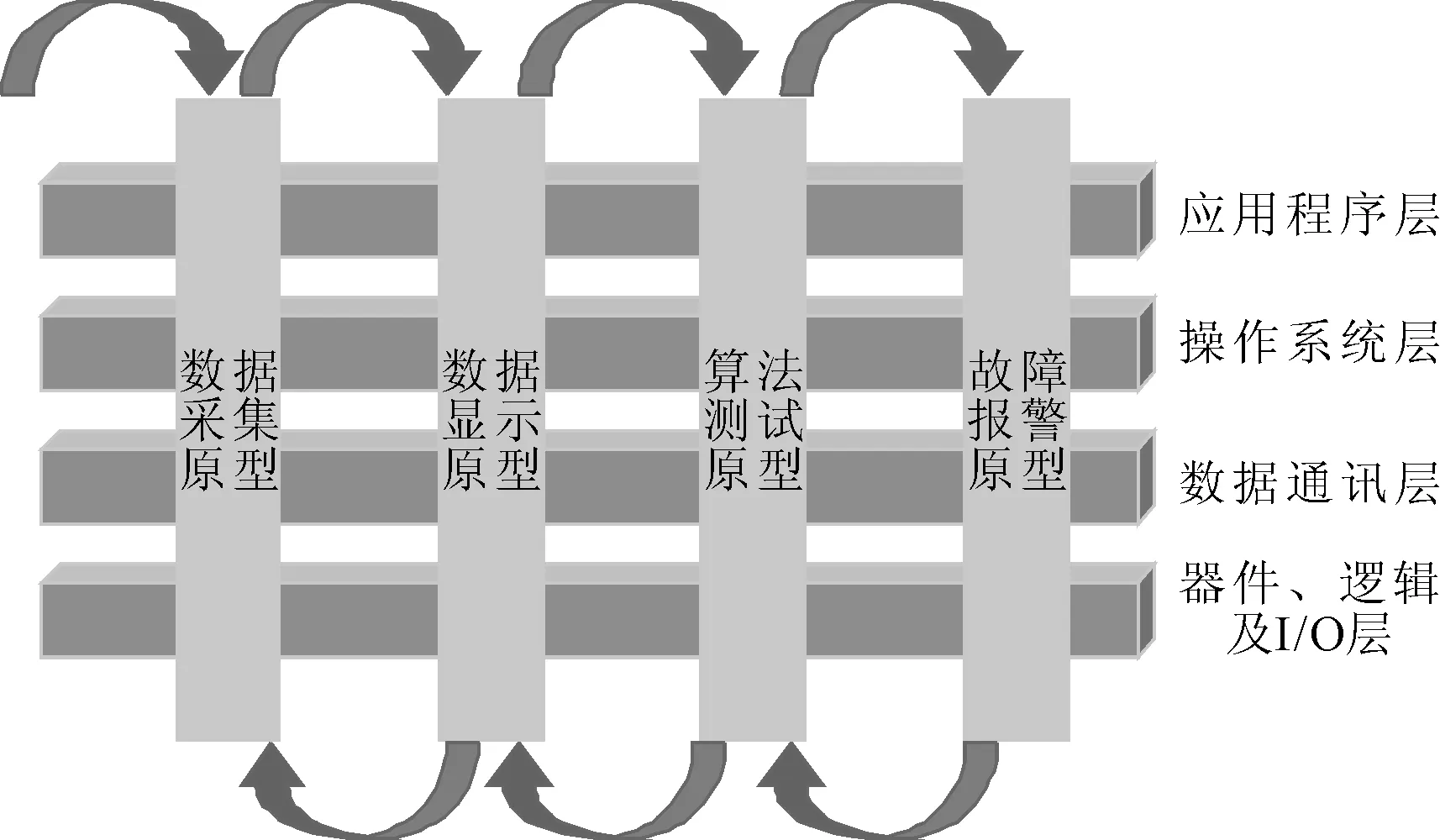
图6 系统平台开发模型
系统平台根据实现的抽象层次划分为4个层次,分别为器件、逻辑及IO层,数据通讯层、操作系统层、应用程序层。系统平台开发分为4个原型阶段:数据采集原型、数据显示原型、算法测试原型、故障报警原型。在不同的原型阶段逐步添加和细化系统功能,在每个原型阶段的开发中都完整包含4个抽象层次的实现内容,随着开发过程的推进逐步完善功能,完成研究的任务要求。这种开发模型的优点在于,在设计开发的初期,能最大限度地对各个抽象层面可能面对的问题进行尝试和解决,对开发风险比较有把握,使得后期的功能迭代比较顺利,减少传统开发过程中在系统功能集成阶段暴露出接口冲突或参数不匹配等问题,减少变更和返工,提高研发效率。
4 结论
提出一种基于热成像分析原理的火灾超早期探测方法。该技术突破了传统探测器对于火灾烟气羽流扩散激励的依赖,并可以克服视频及光谱探测器早期探测能力的缺陷,实现对舰艇火灾的超早期探测,满足舰艇消防安全对于异常预警、早期报警技术的迫切需求,为实现智能化异常预警、早期报警以及快速灭火联动的目标奠定技术基础。并且于国内首次提出了基于模型设计的红外系统硬件在环(HIL)设计平台,实现一种应用基于模型的系统工程(MBSE)及基于模型设计(MBD)的系统开发方案。该开发方案可以实现焦平面红外系统的数字化设计过程,可以大幅提高舰艇火灾超早期探测系统的研究和开发能力。
通过研究的技术基础,可以进一步深化研究,以舰艇火灾红外超早期探测方法为基础,优化火灾及故障热图像判定技术研究,结合超光谱气体成像技术、以及分布组网技术等方面,对舰艇典型热故障的红外热像判定算法进行更加细致的研究,并为实现对舰艇火灾热目标捕捉提供新思路,为实现智能化舰艇火灾异常预警和超早期报警方法提供可行性,形成在舰艇半封闭、高设备密度的环境下的超早期火灾探测预警装备。将红外火场图像、气体组分浓度的获取与传输通讯等功能集成一体,为进一步研制潜艇火灾超早期探测装备奠定技术基础。
猜你喜欢
凤凰动漫(军事大王)(2022年3期)2022-06-17
环球时报(2022-05-23)2022-05-23
军事文摘(2021年21期)2021-11-14
金桥(2021年4期)2021-05-21
电子制作(2019年7期)2019-04-25
电子制作(2019年7期)2019-04-25
兵器知识(2017年10期)2017-10-19
文理导航·趣味课堂(2016年6期)2016-09-09
故事作文·高年级(2009年7期)2009-08-20