
基于模糊控制的混合臂高空作业车工作斗调平控制系统研究
2019-01-07 02:40:50曾致豪王凯丽
现代机械 2018年6期
周 攀,侯 帅,曾致豪,王凯丽,周 静,付 耀,宋 超
(长安大学工程机械学院,陕西西安710064)
0 引言
混合臂高空作业车在高空作业中应用领域广泛,如建筑工地、消防、维修等工况复杂的场合,而混合臂高空作业车工作斗的调平技术至关重要,其工作臂较长,响应性较差,在举升过程中易发生抖动,造成工作人员在高空作业时不安全。因此,研究混合臂高空作业车工作斗调平至关重要。石家庄铁道大学的高兰用PLC控制调平油缸,设计了模糊PID控制系统;长安大学的雷晓顺等人针对阀控液压马达系统设计了模糊控制系统[1-2]。上述研究为混合臂高空作业车工作斗调平提供了理论依据,也为模糊PID控制系统提供了新思路。
1 混合臂高空作业车结构、作业特点及调平要求
1.1 混合臂高空作业车结构
混合臂高空作业车结构如图1。
1.2 混合臂高空作业车作业特点
结合臂架结构及举升幅角变化,该高空作业车工作斗调平控制系统的特点如下:
1)工作斗结合伸缩臂、折叠臂的旋转,配合转台的回转,其作业空间较大。
2)工作斗相对于伸缩臂、折叠臂变幅可反向转动,适应于复杂、非结构性环境。
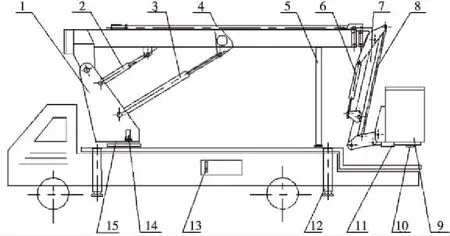
1-转台;2-平衡油缸;3-伸缩臂变幅油缸;4-伸缩油缸;5-伸缩臂支架;6-折叠臂变幅油缸;7-折叠臂;8-平衡拉杆;9-工作斗;10-角度传感器;11-调平油缸;12-支架;13-油箱;14-回转机构;15-回转支承。图1 混合臂高空作业车结构
3)混合臂高空作业车在举升过程中由同1个PLC控制器控制,即伸缩臂、折叠臂和工作斗的三个输入间为互锁关系,提高了工作斗的平稳性和可靠性[3]。
1.3 调平要求
基于上述混合臂高空作业车的作业特点,对工作斗调平控制系统的要求为:稳定性高、响应快速、精度高(参考高空作业车国家标准,规定该调平控制系统工作斗与水平面的夹角不超过5°)。
2 混合臂高空作业车调平控制系统方案

图2 电液比例调平原理
综合考虑混合臂高空作业车工作斗调平所需具备的精确性、快速性和稳定性,选用电液比例调平机构。伸缩臂、折叠臂旋转的角度α、β之和与工作斗旋转的角度ω大小相等,方向相反,但实际上|ω|≠|α+β|,允许工作斗与水平面之间的角度在5°范围。工作斗上安装有角度传感器,角度传感器将检测到的角度信号输入给主控制器PLC,信号经控制器处理后驱动电液比例换向阀3,控制电液比例换向阀3的阀口开度和换向,然后压力油经平衡阀2作用给调平油缸1,调平油缸1中活塞杆伸长或缩短,工作斗正转或反转,工作斗转动角度与工作斗角度传感器检测到的信号成比例。电液比例调平原理如图2。混合臂高空作业车工作斗调平控制系统的控制原理如图3。

图3 混合臂高空作业车工作斗调平控制系统的控制原理
3 混合臂高空作业车工作斗调平控制系统建模与仿真
3.1 混合臂高空作业车工作斗调平控制系统建模
通常将电液比例阀视为一个由二节振荡环节和二节比例环节组成[4],其传递函数为:
(1)
式中:Xv—电液比例阀的阀芯位移;I—输入电液比例阀的电流;Kv—电液比例阀的增益;ωv—电液比例阀的固有频率;δv—电液比例阀的阻尼比系数。
调平控制系统在工作时,调平油缸的传递函数为[1]:
(2)
式中:Km—电液比例阀的流量增益;Am—负载有效流量面积;ωh—压力油固有频率;δh—压力油的阻尼比系数。
角度传感器在有效空间为一比例环节[1],其传递函数为:
(3)
式中:K0—等效比例系数,取K0=1。
调平控制系统的开环传递函数为:
(4)
调平控制系统的闭环传递函数为:
(5)
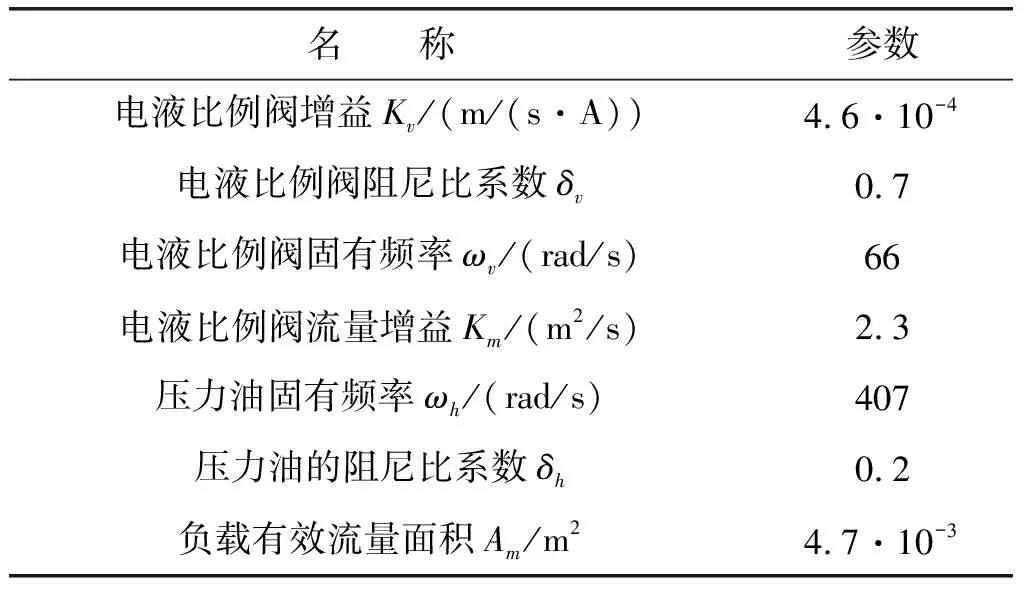
表1 系统基本参数
系统基本参数如表1所示。代入数据得,控制系统框图如图4。
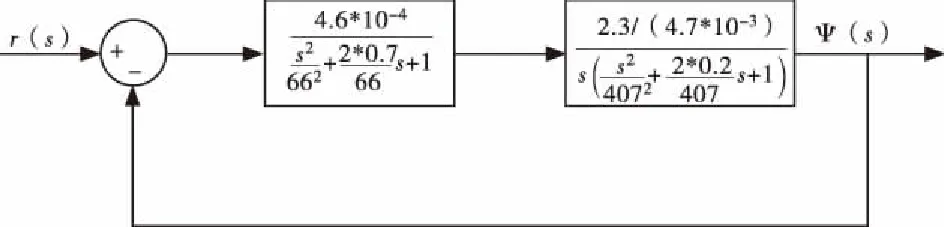
图4 控制系统框图
3.2 混合臂高空作业车工作斗调平控制系统仿真
调平控制系统Bode图如图5,相位裕度和幅值裕度均为正,该调平控制系统是稳定的。由Simulink仿真可得出控调平制系统单位阶跃响应曲线(图6),调平控制系统能达到稳定状态,但响应较慢,需设计模糊PID控制器。

图5 调平控制系统Bode图

图6 调平控制系统单位阶跃响应曲线
4 混合臂高空作业车工作斗调平控制系统模糊PID控制器设计
混合臂高空作业车工作斗模糊PID调平控制系统原理图如图7。调平控制系统在运行中,不断检测e和ec,根据模糊控制原理对3个参数在线修改以满足不同e和ec时对控制参数的要求,从而使得混合臂高空作业车工作斗在满足该调平控制系统要求的精度下平稳,快速的调平。

图7 混合臂高空作业车工作斗模糊PID调平控制系统原理
4.1 确定混合臂高空作业车调平控制系统模糊规则
模糊PID控制器以角度偏差e和角度偏差变化率ec作为输入,变量kp,ki,kd作为输出,将e,ec,kp,ki,kd的模糊子集设为{负大、负中、负小、零、正小、正中、正大}={NB、NM、NS、ZO、PS、PM、PB},角度偏差e、角度偏差变化率ec和kp的论域均为{-6,-4,-2,0,2,4,6},ki和kd的论域均为{-3,-2,-1,0,1,2,3}。NB、PB为S型函数,其它为trimf函数。根据已有PID控制系统的设计经验,得模糊控制参数调节器对PID参数的调整规律[1]:
1)当角度偏差|e|较大时,kp取值较大,kd较小,ki为零;
2)当角度偏差|e|和角度偏差变化率|ec|中等大小时,kp取值较小,ki和kd适中;
3)当角度偏差|e|较小时,ki和kp取值较大;
4)当角度偏差变化率|ec|较小时,kd中等大小;
5)当角度偏差变化率|ec|较大时,kd取值较小。
根据经验可得kp,ki,kd的模糊规则表分别如表2、表3、表4。输入变量e和ec与输出变量kp的隶属度函数如图8,输出变量ki和kd的隶属度函数如图9。

表2Δkp的模糊规则表
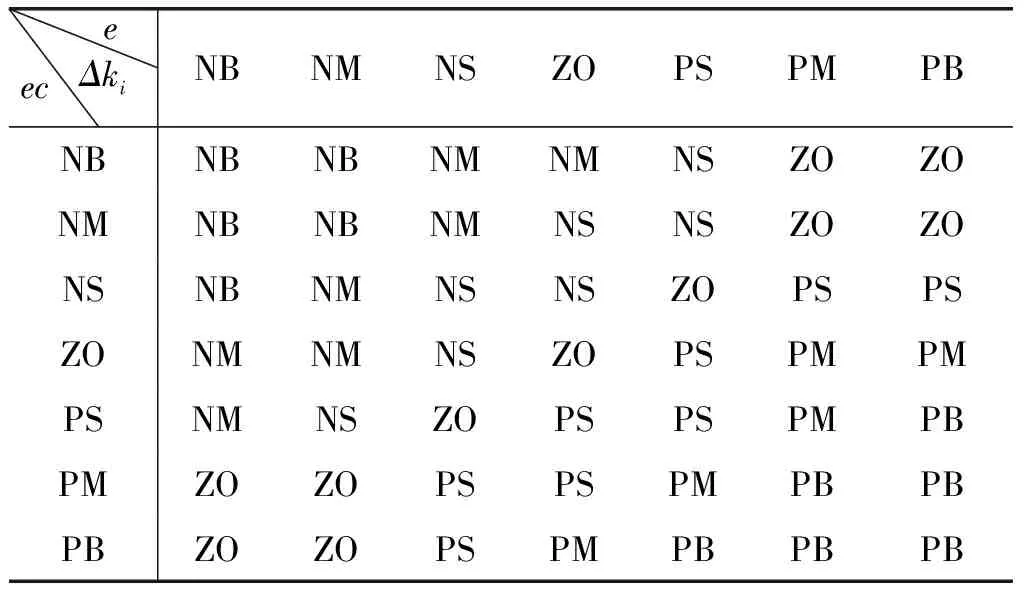
表3Δki的模糊规则表
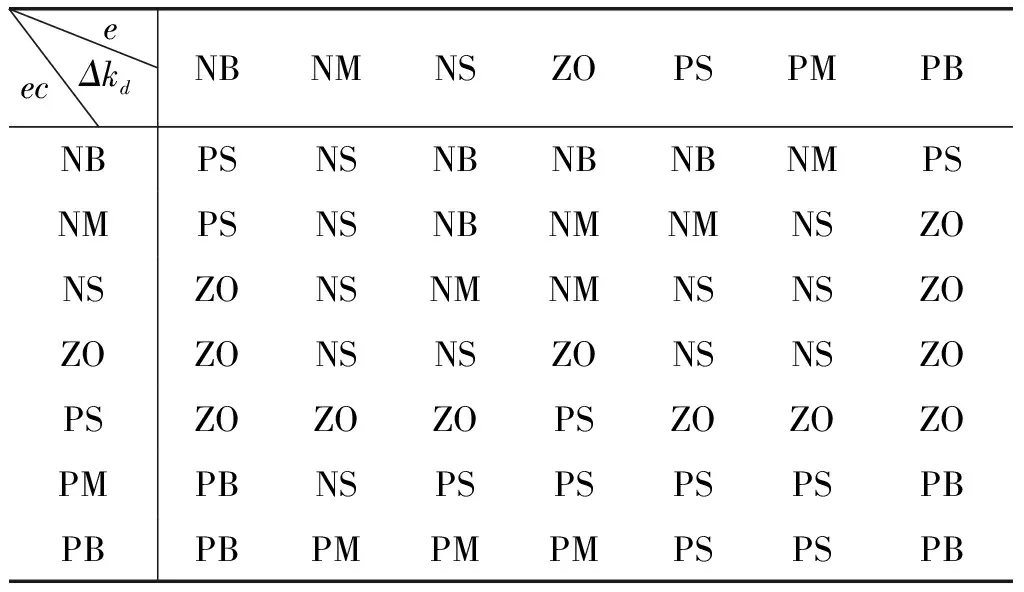
表4Δkd的模糊规则表

图8 e、ec、kp的隶属度函数曲线
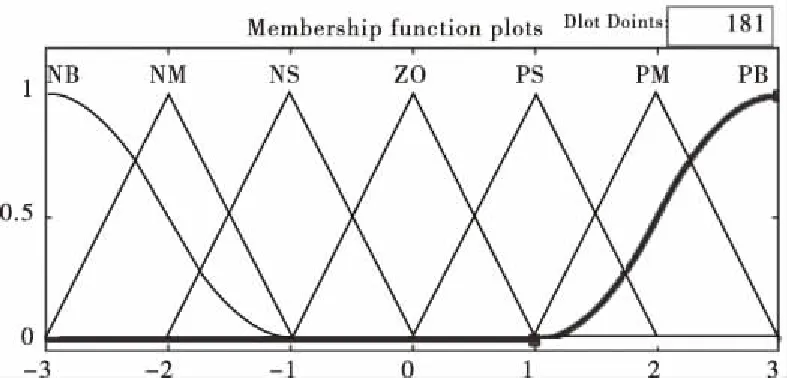
图9 ki和kd的隶属度函数曲线
4.2 混合臂高空作业车工作斗调平控制系统仿真
根据混合臂高空作业车工作斗调平控制系统数学模型,建立混合臂高空作业车工作斗调平控制系统的模糊PID仿真模型如图10,其模糊PID调平控制系统单位阶跃响应曲线如图11。
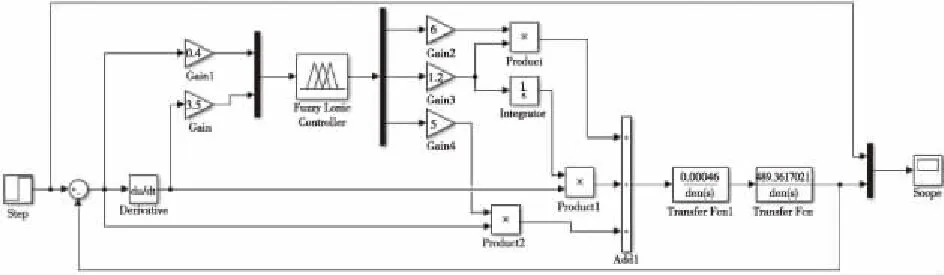
图10 模糊PID调平控制系统仿真模型
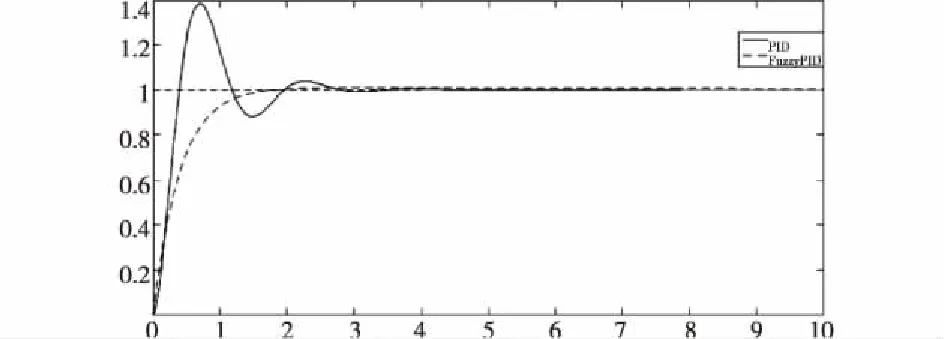
图11 模糊PID调平控制系统单位阶跃响应曲线
4.3 混合臂高空作业车工作斗角度控制系统仿真分析
由图11可知,模糊PID调平控制系统在2 s以内就能达到稳定,而且没有超调,而常规PID控制在将近4 s时才能达到稳定,且超调量将近40%,仿真结果表明模糊PID控策略在混合臂高空作业车工作斗调平控制系统性能上优于常规PID控制策略,该模糊PID调平控制系统满足要求,可用于实际需求。
5 结束语
结合混合臂高空作业车结构及作业特点,提出了基于模糊控制的混合臂高空作业车工作斗调平控制系统,构建出混合臂高空作业车工作斗基于模糊控制的调平控制系统,设计出模糊PID控制器,以保证全举升空间的调平控制系统性能。采用阶跃输入工况下对混合臂高空作业车工作斗调平控制系统进行仿真研究,仿真结果表明模糊PID控制较常规PID控制快速性、稳定性及精确性高,验证了基于模糊控制的混合臂高空作业车工作斗调平控制系统的有效性和合理性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:46
中国民间疗法(2021年5期)2021-06-09 09:21:08
化工管理(2021年7期)2021-05-13 00:46:16
装备制造技术(2020年3期)2020-12-25 05:22:38
机械工程与自动化(2020年4期)2020-08-25 02:06:58
电子制作(2018年19期)2018-11-14 02:36:42
森林工程(2018年4期)2018-08-04 03:23:38
航天工业管理(2017年4期)2017-05-12 01:16:35
工业设计(2016年6期)2016-04-17 06:42:51
专用汽车(2016年4期)2016-03-01 04:14:27
