机车全动态包络线测量中的目标点自动识别算法研究
2019-01-07 06:28邹志马骊群甘晓川樊晶晶
计测技术 2018年5期
邹志,马骊群,甘晓川,樊晶晶
(航空工业北京长城计量测试技术研究所,北京 100095)
0 引言
铁路机车的动态限界是在结构限界和静态限界基础上,进一步考虑悬挂的静态、准静态和动态振动变形的限界,也被称作动态包络线[1]。现有动态限界研究采用理论模型仿真方法和直接测量方法。理论模型仿真方法仅计算理论的位移量,而不同车体的实际振动相对理论模型会有差异,且车体的机械弹簧与空气弹簧使得机车整体非刚体,故理论值无法代表实际偏移,只能作为一个测量参考。直接测量方法分为位移传感器方法和摄影测量方法。其中,位移传感器方法是在机车车体某一截面上布设多个位移传感器,当车体晃动时,传感器的位移发生变化,根据位移的相对变化量和传感器的安置位置确定车体的动态限界。位移传感器方法无法保证传感器的布置方向与机车振动方法完全平行,故测量存在理论误差;且此方法待测点较多,线位移传感器的安装与拆卸工作繁琐,测量效率低。摄影测量[2]方法通过在机车的端面各个预观测位置布置观测目标点,利用工业相机对目标点进行连续拍摄,通过数字图像处理技术得到目标点的运动轨迹,分析机车整车在振动过程中的最大偏移量,进而得到限界。这种方法得到的限界更直观、更真实,无需补偿,抗干扰能力强,是一种高速、便捷、精度高的非接触测量方法。随着相机性能的提升,摄影测量方法应用范围越来越广。但该方法存在的最大问题是如何快速识别出目标点以满足机车的动态响应要求。
本文提出了一种适用于摄影测量方法的目标快速自动识别与匹配方法,其中针对目标快速自动识别提出了一种基于双分辨力空间分析的目标点识别算法,它有效解决了高分辨力图像对于多目标的搜索效率问题;针对目标的准确匹配,提出了一种基于自描述向量的RANSAC算法,该方法可有效减少非观测目标的干扰,同时可以预测单应矩阵求解后目标的匹配精度。
1 测量系统及目标自动识别算法
本文识别的目标是一种光强可控的红外LED主动光学目标,其分布范围为6 m×6 m,直径为40 mm,数量可达25个。采用分辨力为2000万像素的黑白工业相机拍摄,相机的帧采样频率为30帧/秒。如图1所示,测量系统包括红外目标、多通道目标控制器、高速工业相机、图像采集及处理系统等。其中目标可根据需要布设在机车端面的任意观测位置上。
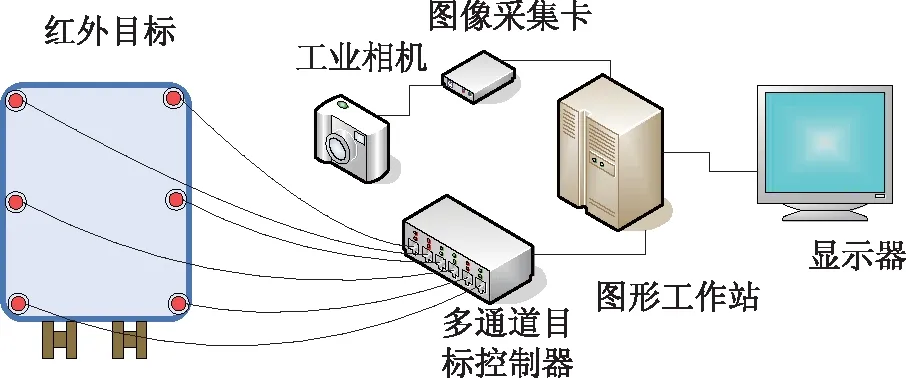
图1 机车全动态包络线测量系统示意图
传统的识别目标点方法一般需要对预处理后的整幅图像进行卷积、边缘提取、特征分析等,故运算量大、处理时间长,对系统的硬件设备要求较高,不适合进行现场高分辨力图像的快速处理。如果能将整幅图像中属于可能目标点的图像区域预先估计出来,就可以通过附加判断条件直接识别目标,从而有效提高目标的识别速度。因此,为了避免对整幅图像的全部数据进行分析,本文提出了基于双分辨力空间分析的目标点识别算法,以实现目标点的自动、准确提取与匹配,自动识别算法流程如图2所示。

图2 自动识别算法流程图
采用高低两种图像分辨力进行图像分析,寻找目标点,避免对整幅图像的全部数据进行分析。处理方法为:
2)对搜索区域进行二值化,判断连通域的个数,当连通域个数为1,且连通域面积符合实际光斑大小时,认为该连通域为光斑;若连通域个数为0,或连通域个数为1但面积小于光斑大小的80%时,则认为该光斑存在遮挡;若连通区域个数大于1,则认为出现干扰。
(1)
当某一区域出现遮挡和干扰情况时,将在低分辨力下进行处理。在低分辨力计算中,首先对图像进行连续下采样操作,从原始分辨力降至原来的1/64,即图像的宽和高均变为原来的1/8,并对图像进行二值化,通过在低分辨力图像中寻找灰度高于阈值的像素,作为高分辨力下区域增长算法的“初始点”,以实现高分辨力图像连通域的快速提取。
2 基于自描述向量的RANSAC目标匹配法
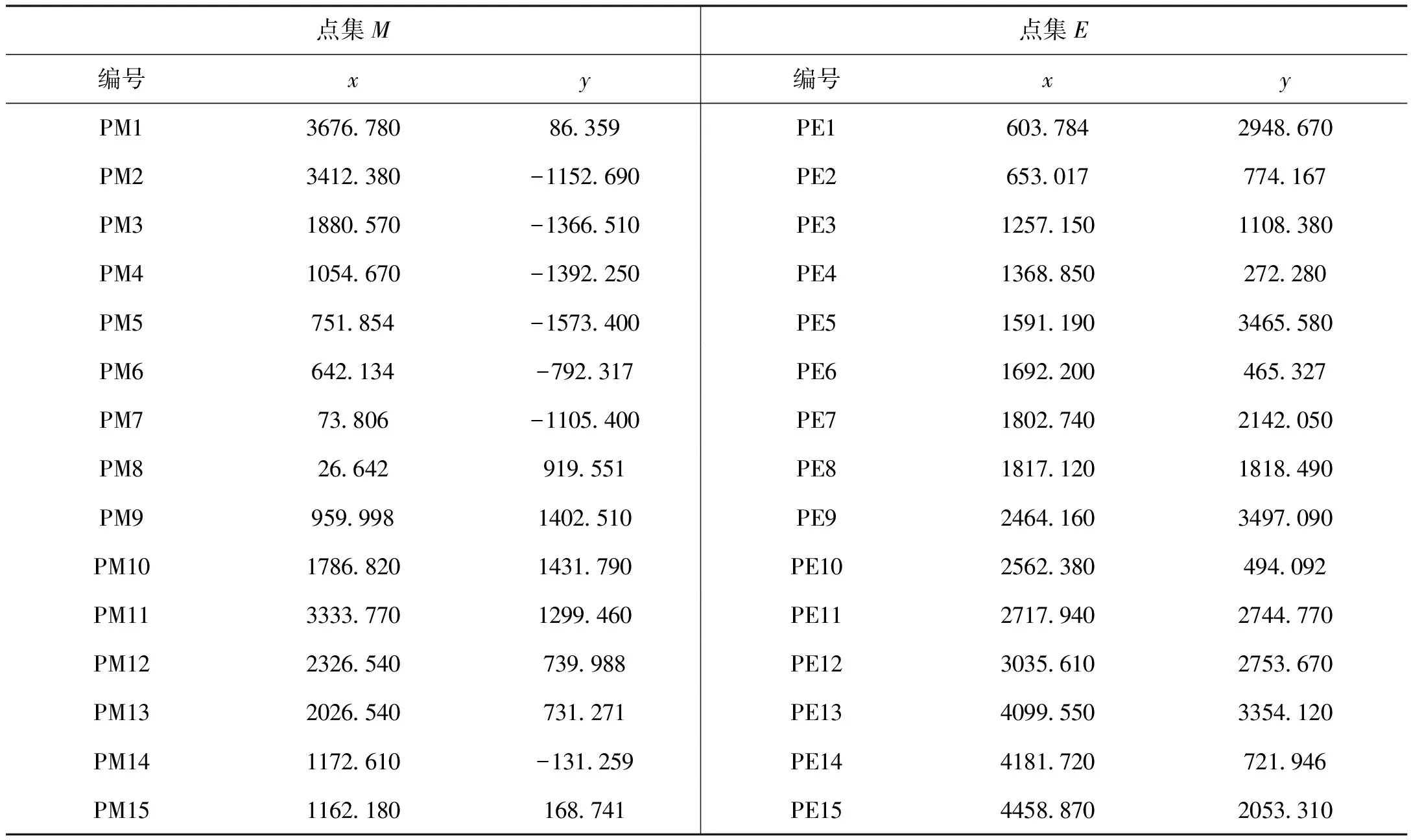
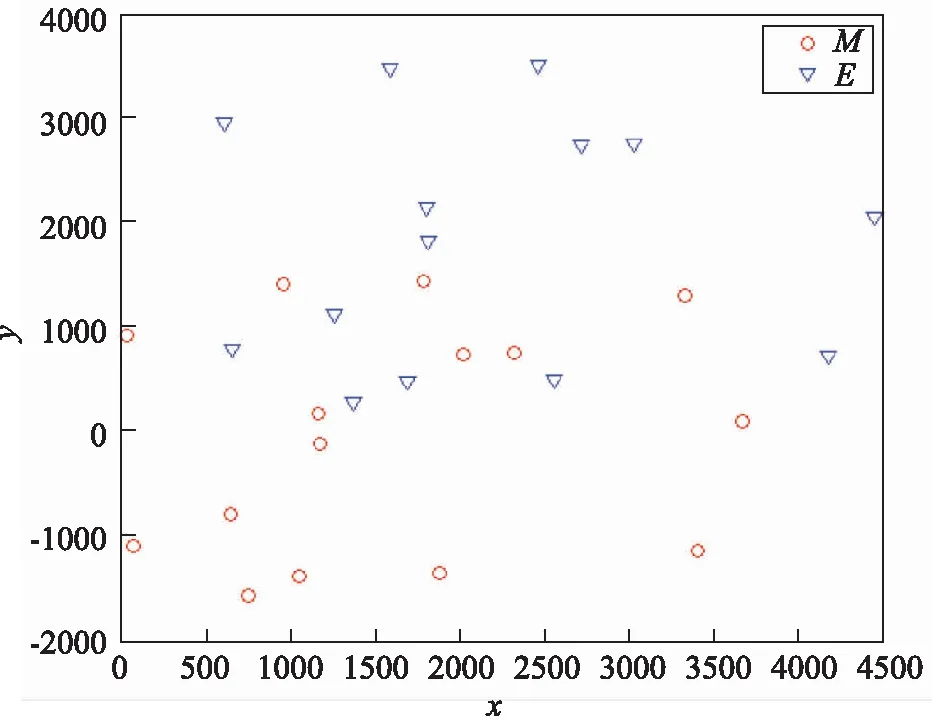
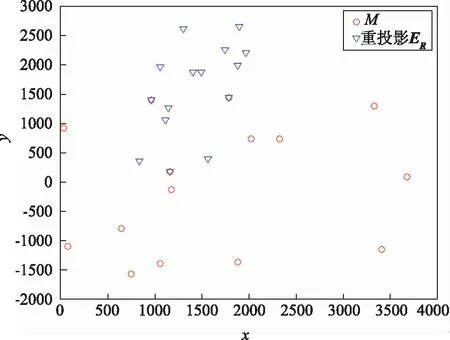
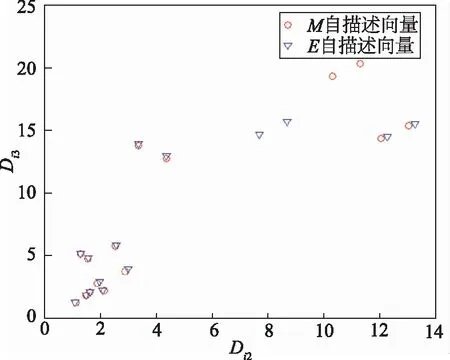
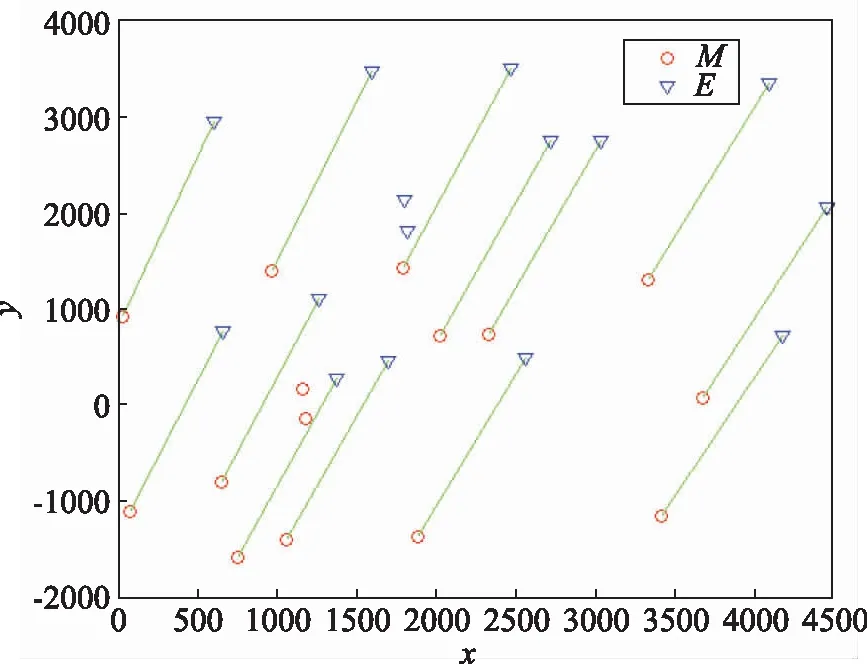
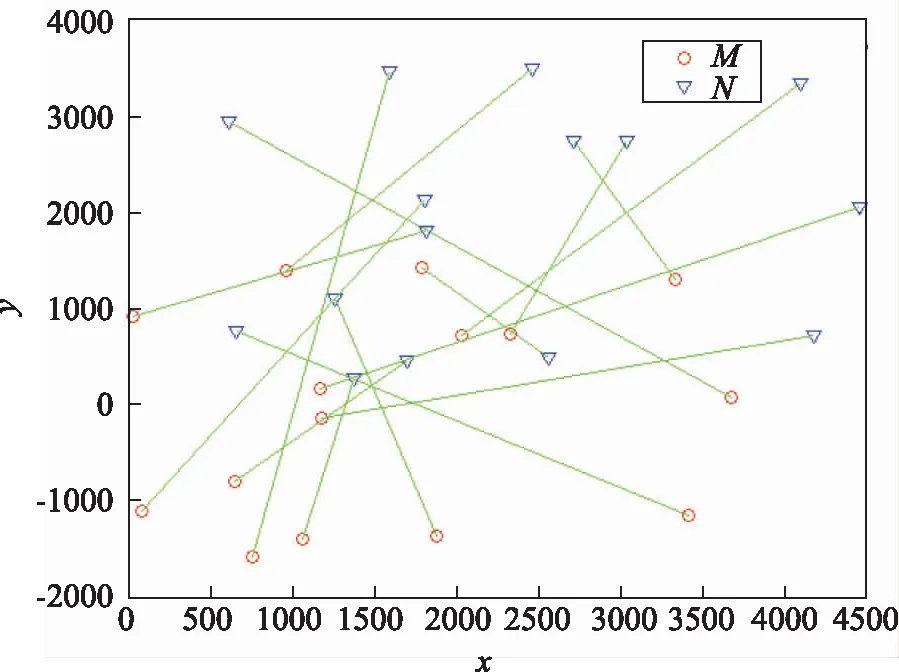
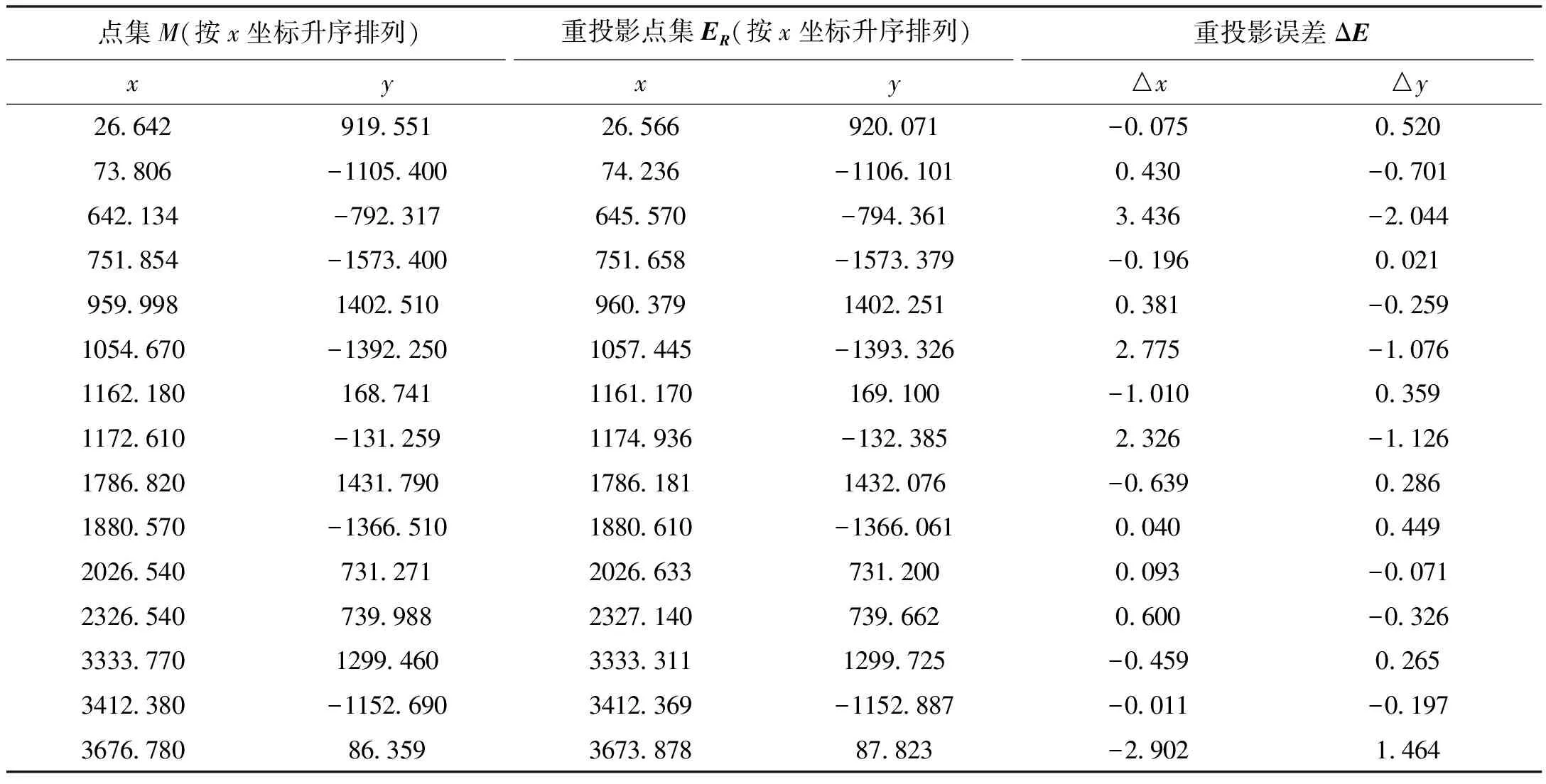
当出现遮挡和干扰情况时,为了将实际目标和噪音目标区分开,需要采用特殊的目标匹配方法。一般目标匹配可通过单应矩阵将测量图像中的目标与参考图像中的目标一一关联。常用的单应矩阵计算方法采用RANSAC算法,但RANSAC算法在求解单应矩阵时有这样一个限制条件,即参与匹配的N个点对随机抽取的p(p 由于下采样得到的疑似目标包含了噪音目标,故无法保证所得到的均为完全有效的匹配点。因此,本文提出一种基于自描述向量的RANSAC算法进行无序点集匹配。 如果两组目标点匹配正确,则每个已知目标点的自描述向量与待匹配目标点的自描述向量相似,判断两者相似度的方法为:计算两组点集的每一个独立点的自描述向量,从两组点集中分别任取一个点的自描述向量,计算两个自描述向量的欧氏距离,将两个向量的欧式距离作为这个两个点的最邻近区域的相似度,通过设定阈值Thr,以最邻近区域的相似度小于Thr的点对作为RANSAC算法的初始输入。将第1组点中的每一个点的自描述向量与第二组的每一点的自描述向量进行遍历,进行欧式距离求解,设DVij为第1组第i点到第2组第j点的最邻近区域相似度,则 (2) 现有两组点集M,E,M为第N-1幅图像得到的目标点集,E为第N幅图像得到的连通区域中心点集,点集M中的每一点PMi,都在点集E中拥有对应点PEj,但i=j不一定成立,即两组点集中拥有相同序号的点的不一定是匹配点,点坐标在表1中呈现。两组点集中目标的位置在同一坐标系下如图3所示。 表1 两组无序点集M和E 图3 点集M和点集E的坐标关系图 直接采用传统的RANSAC算法,求解点集E相对于点集M的单应矩阵,该单应矩阵为HE→M: 将E利用单应矩阵HE→M进行重投影变换后,则重投影点集 ER=HE→MM (3) 重投影误差 ΔE=ER-E (4) 将点集E经单应矩阵HE→M进行重投影变换后得到的ER与点集M显示在同一坐标系下,如图4所示。 图4 点集M和重投影点集ER的坐标关系图 可以看出,ER完全与E失去了投影变换关系。直接按顺序进行配对,仅有少数的几个点为正确匹配,证明使用传统的RANSAC算法错误率较高。采用本文的算法,利用自描述向量分别对无序点集M与点集E进行描述,将点集M和点集E自描述向量的前两个长度元素在同一坐标系下显示,如图5所示。 图5 点集M和点集E自描述向量的前两个长度元素坐标关系 采用欧氏距离衡量自描述向量的相似度。在点集E的所有点自描述向量中,寻找与点集M中自描述向量相似度最高的两个点进行配对,配对结果如图6所示。 图6 将自描述向量相似度最高的两个点进行配对后的结果 如果直接按M和E两个点集原先的点顺序进行配对,配对结果如图7所示。 图7 直接按M和E两个点集原先的点顺序进行配对后的结果 对比图6与图7可以看出,对于无序点集,直接采用RANSAC算法进行单应矩阵求解准确率低的原因是有效点对的数量太少,匹配准确率仅为3/15≈20%,而采用自描述向量的RANSAC则具有较高匹配准确率,匹配率达到13/15≈86%。 利用欧氏距离对点集M和点集E自描述向量进行配对,采用同样的阈值进行内点外点的区分,可以看出,应用自描述向量的RANSAC算法与直接利用点序号进行配对相比,配对的准确性大幅提高。 根据自描述向量,将无序点配对后,重新利用RANSAC算法求得点集E相对于点集M的单应矩阵TE→M, 根据式(4)和式(5)计算重投影点集ER和重投影误差ΔE,结果如表2所示。 表2 重投影点集和重投影误差 针对机车动态限界高分辨力图像的高效处理问题,提出了一种基于参考图像的快速识别方法,通过判断连通域的目标个数可快速提取有效目标。对于连通域中的目标个数不为1的疑似目标采用下采样的目标识别方法,并将下采样图像中的目标与高分辨力图像中的目标进行重投影,经实验证明可有效节省处理时间;对于无法进行一一匹配的目标点对,提出了一种基于自描述向量的RANSAC匹配算法,有效地去除了疑似目标中的噪声目标,实现了无序目标点对的高精度匹配。2.1 自描述向量


2.2 目标点自描述向量的相似度
2.3 传统RANSAC算法与本文算法的比较实验
3 结论
猜你喜欢
铁道标准设计(2022年10期)2022-10-10
红外技术(2022年4期)2022-04-25
交通科技与管理(2021年5期)2021-06-13
哈尔滨铁道科技(2020年3期)2021-01-18
铁道通信信号(2019年2期)2019-03-26
中国医学装备(2019年1期)2019-02-14
中国铸造装备与技术(2017年3期)2017-06-21
医疗卫生装备(2015年9期)2015-12-27
中国光学(2015年5期)2015-12-09
铁路通信信号工程技术(2015年4期)2015-02-28