
高超声速运动点目标检测
2019-01-07 06:29唐宏晨徐鹏阮宁娟邱民朴
航天返回与遥感 2018年6期
唐宏晨 徐鹏 阮宁娟,2 邱民朴
高超声速运动点目标检测
唐宏晨1徐鹏1阮宁娟1,2邱民朴1
(1 北京空间机电研究所,北京 100094)(2 先进光学遥感技术北京市重点实验室,北京 100094)
为了降低红外运动点目标检测的漏检率与虚警率,文章以“猎鹰2号”为例,从天基红外遥感图像生成的角度出发,计算了高超声速飞行器多种工况的辐射特性,提出了一种基于目标速度与辐射特性的红外运动点目标检测方法。该方法将高超声速目标的速度与遥感图像的灰度关联,以目标的飞行速度作为单帧图像灰度阈值分割的条件,实现阈值分割与速度滤波并行,并进行多帧图像疑似目标二次速度匹配滤波,实现目标检测。仿真结果表明:文章提出的点目标检测方法对于高超声速目标检测效果优良,检测率为94.4%,虚警率为5.86×10−5%。在具备目标表面平均温度与速度对应关系的情况下,该方法可应用于多种不同红外运动点目标的检测。
高超声速飞行器 辐射特性 阈值分割 点目标检测 空间遥感
0 引言
高超声速飞行器是指在距离地面20~100km的临近空间、飞行马赫数大于5的飞行器,能够在短时间内到达上万千米外的区域实施侦察打击,具有重要的军事价值[1]。高超声速飞行器在临近空间飞行时,机体表面与空气剧烈摩擦,产生大量红外热辐射,与背景形成巨大差异。为实现远距离侦查打击,高超声速飞行器长时间在临近空间飞行[2],若要对高超声速目标进行防御,需实现对其远距离探测识别。
天基红外探测系统覆盖范围广,是实现高超声速飞行器探测的有效手段[3]。目标检测是红外探测系统实现效用过程中的重要一环,使用合理的目标检测技术能准确、有效地探测跟踪目标。因此进行高超声速运动目标检测技术的研究具有重要意义。
由于高超声速目标相对于天基红外探测系统的张角小于探测系统的瞬时视场角,高超声速目标相对于天基红外探测系统而言为点目标[4],高超声速目标的检测可等同于复杂背景条件下运动点目标的检测。当前,运动点目标检测方法的主流研究方向为多帧检测,多帧检测分为先检测后跟踪和先跟踪后检测两种方法[5-6]。由于先跟踪后检测法计算量过大,影响目标检测算法的效率,难以扩展到实时系统中;先检测后跟踪法检测效率高、适用范围广、思路简单,因此实际系统大都是采用先检测后跟踪法[7]。先检测后跟踪法的步骤包括图像预处理、阈值分割、多帧图像检测与跟踪[8],其中性能优良的阈值分割方法能有效提高算法的检测效率。经典阈值分割方法包括最大类间方差法、最大熵估计法和自适应阈值分割等方法[9-11]。在单帧图像中,点目标的全局特征不明显,采用最大类间方差法则会很容易将目标划分到背景区域;最大熵估计法计算过程中涉及很多对数运算,增加了算法的复杂性;自适应阈值分割法的权值在使用过程中不易确定。且这三种阈值分割方法都是基于图像灰度全局分布的分割方法,阈值的确定仅考虑背景因素。当探测场景复杂多变时,部分背景区域像元的灰度值会超过目标所在像元的灰度值,目标极易被划分到背景区域,导致虚警和漏检。本文提出的阈值分割方法,在图像分割的同时也进行了一次速度滤波,目标不会被划分到背景区域,分割过程中不易产生漏检,整个检测过程中有两次速度滤波,可有效降低虚警率。
文章以“猎鹰2号”(HTV-2)高超声速飞行器为例,基于常见红外探测谱段2.7~2.9μm的遥感图像,从遥感图像生成的角度出发,计算了高超声速飞行器多种工况条件下在探测系统入瞳处的光谱辐射强度,分析了目标光谱辐射强度与其在图像内灰度值的关系,并进一步推导了目标飞行速度与其灰度值关系;采用先检测后跟踪的检测思路,提出了一种以高超声速目标飞行速度作为阈值条件的单帧图像阈值分割方法,并实现多帧图像运动点目标检测。
1 目标灰度与速度关联
探测谱段确定后,目标在遥感图像内的灰度值与其自身的辐射强度直接相关,目前学者们计算高超声速目标红外辐射特性时多采用建模与仿真的方法[12-14]。目标红外辐射特性与表面温度、表面发射率及可见面积相关。由于点目标无具体形态特征,在仿真计算中目标可看做为灰体:设目标表面发射率为t,沿观测方向的可见面积为t,则目标沿观测方向的光谱辐射强度t为

式中bλ为黑体的光谱辐射出射度,计算公式为
式中1为普朗克第一辐射常数;2为普朗克第二辐射常数;为黑体温度;为光谱中心波长。
文献[15]研究表明,HTV-2在临近空间飞行时具有以下特征:目标常在距离地球表面30~50km的临近空间飞行;目标飞行马赫数为7时,其表面平均温度约为1 000K,目标飞行马赫数为17时,其表面平均温度约为1 270K。文章分别计算不同飞行高度时,HTV-2在红外探测系统入瞳前的光谱辐射强度。为便于说明后续目标检测方法,仿真计算过程中认为:目标飞行高度大于30km时,表面平均温度只与速度相关,且将目标表面平均温度与速度近似为线性关系[16]。结合大气辐射分析软件MODTRAN计算大气透过率数据,仿真计算结果见图1。

图1 目标在探测器入瞳出光谱辐射强度
图1所示的仿真结果与文献[13]一致。高超声速目标飞行速度越快,其在探测系统入瞳处的光谱辐射强度越大;目标飞行高度为30km时,探测谱段中心波长在4.3μm和2.7μm附近其光谱辐射强度受大气衰减影响较明显;目标飞行高度为50km时,其光谱辐射强度基本不受大气影响。高超声速目标飞行高度高,目标上空为平流层顶部区域、中间层和电离层,该区域大气稀薄,飞行高度越高,大气对目标辐射传输的衰减作用越弱,目标辐射信号越强;常见的红外探测系统的探测谱段与高超声速飞行器红外辐射峰值的中心波长均处于中短波红外[17]。因此,本文基于探测谱段为2.7~2.9μm的遥感图像,对目标飞行高度为30km时不同速度的情况进行分析。
2.7~2.9μm谱段在大气吸收带附近,由于大气对地物辐射传输的衰减作用,高超声速目标天基红外探测的场景主要为复杂云背景,且目标无具体形态,检测时可利用的信息少,给检测带来了巨大的困难。由于高超声速目标运动时与大气产生剧烈的摩擦,导致其表面平均温度较高,目标沿观测方向上的光谱辐射强度与目标运动速度接近线性关系[16],本文研究旨在讨论阈值分割方法,为简化整个过程,假设高超声速飞行器表面温度仅与速度相关。由式(2)可知,在黑体的光谱辐射出射度仅与其温度有关,且已知目标表面发射率和表面积的情况下,结合式(1)计算目标沿观测方向的光谱辐射强度。光学系统入瞳处接收到的目标辐射功率t为:

遥感图像生成的过程是一个光信号—电信号—数字信号的转换过程,其中光信号到电信号的转化过程可以用目标在探测器处生成的电子数t表示
式中int为系统积分时间;为量子效率;为目标所在像元处能量集中度;为普朗克常数;为光在真空中的传播速度。
遥感图像像元的灰度值体现了数字信号的强弱,电信号到数字信号的转化过程可以用目标在遥感图像内相应的像元灰度值t表征
式中为量化位数;sat为探测器饱和电子数。
对于天基红外探测系统,高超声速飞行器可视为点目标,来自目标辐射的能量覆盖了探测器的若干个单元。其中目标在探测器上对应的中心像元的能量集中度可以表示为[18]:
式中erf为误差函数;d为探测器阵列单元的边长;为光学系统入瞳直径;为光学系统焦距。
由于目标表面温度与速度可近似为线性关系[16],t可改写为:

由式(7)可以看出,目标在遥感图像内的灰度值为目标飞行速度的函数。阈值分割过程中,设图像中各个像元均对应一个运动目标,可反演出各个像元对应目标的运动速度,即
式中为与系统参数相关的常数。
本文以HTV-2高超声速飞行器为例,目标探测过程中只需要判断目标的有无,对其形态信息无需求;且面阵探测器像元数有限。因此,天基红外探测系统需要满足分辨率低、幅宽大、时间分辨率高等特点。算法中设定天基红外探测系统参数如表1所示。
根据表1红外探测系统参数计算目标速度与目标灰度值的关系,结果如图2所示。
表1 天基红外探测系统参数
Tab.1 Parameters of space-based Infrared detection system

由图2可以看出,随灰度值变大,像元对应目标速度非线性变大,31~93灰度范围对应的目标飞行马赫数范围约为7~17。
2 图像阈值分割与目标检测
基于以上分析计算结果,遥感图像像元灰度值可以用该像元所对应目标的速度值表征,即图像灰度矩阵可转换为速度矩阵。根据高超声速飞行器定义将速度阈值设为=5,设定速度阈值后,即可对图像进行分割,同时也是对图像进行了一次速度滤波。对原始图像采用均值滤波实现背景预测,并与原始图像相减,采用本文提出的图像阈值分割法对多种目标飞行速度条件下的图像进行阈值分割处理。以=2为步长,分别试验仿真了多种速度条件下(=7、9、11、13、15、17)含目标的遥感图像、背景减除图像及图像阈值分割图像。对其中部分图像(如图3~5所示)的仿真试验结果进行统计,结果如表2所示。图3~5中红圈内白点为目标。
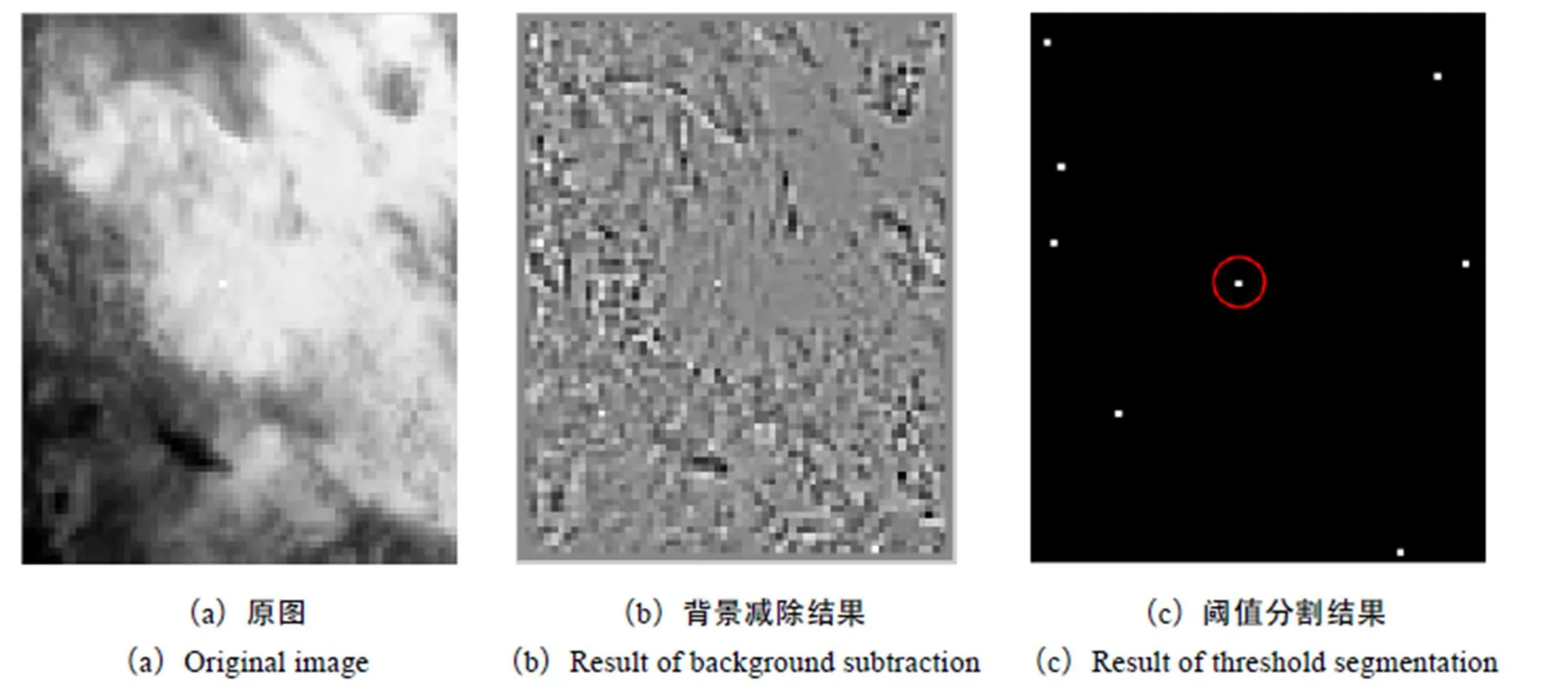
图3 目标马赫数为7时阈值分割结果

图4 目标马赫数为13时阈值分割结果

图5 目标马赫数为17时阈值分割结果
表2 仿真试验灰度统计
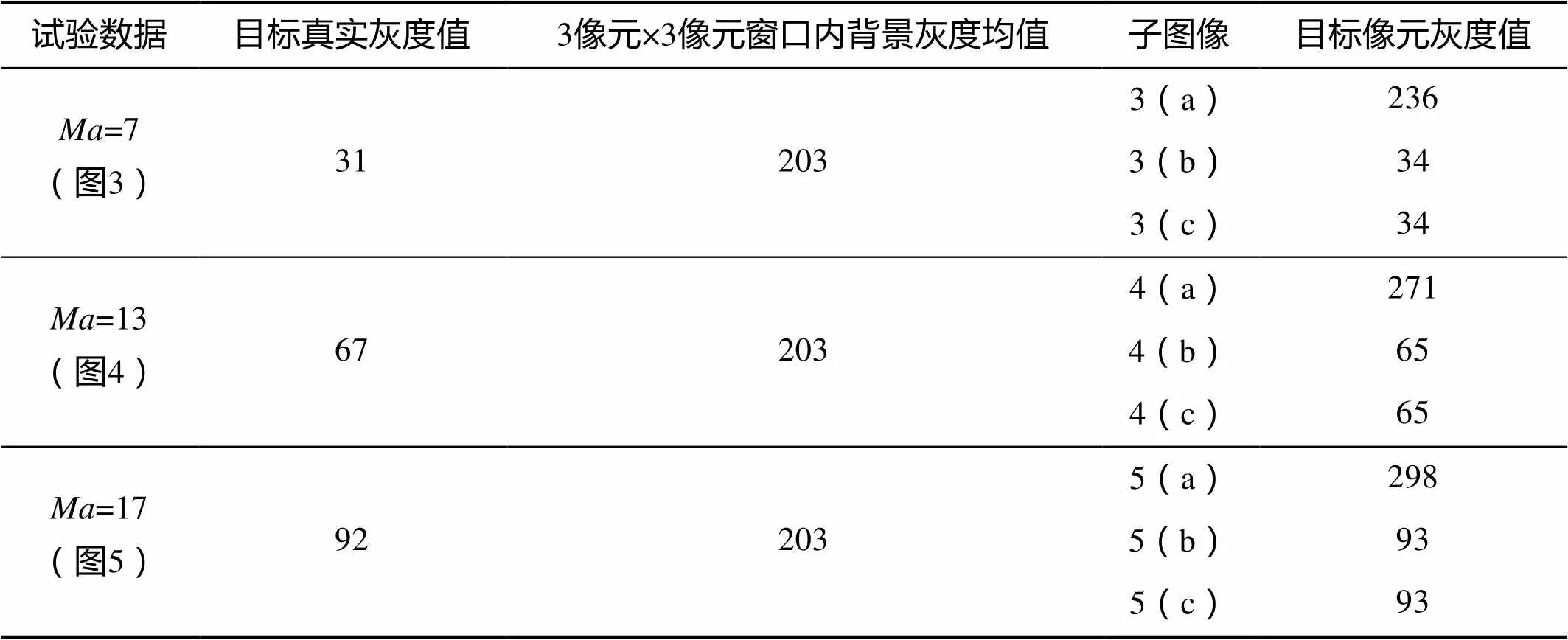
Tab.2 Gray scale statistics of simulation test
图3~5所示的各组试验仿真结果中,图(a)为含目标的仿真遥感图像。其中,图3(a)目标马赫数为7,图中目标像元灰度值为236,对应目标真实灰度为31;图4(a)目标马赫数为13,图中目标像元灰度值为271,对应目标真实灰度为67;图5(a)目标马赫数为17,图中目标像元灰度值为298,对应目标真实灰度为92;以目标像元为中心3像元×3像元窗口内背景灰度均值为203。随着目标马赫数提升,目标在遥感图像内对应像元的灰度值变大,视觉上更容易被感知。
背景减除处理结果如每组图(b)所示。其中,图3(b)目标马赫数为7,图中目标像元灰度值为34;图4(b)目标马赫数为13,图中目标像元灰度值为65;图5(b)目标马赫数为17,图中目标像元灰度值为93;目标像元灰度值与目标真实灰度值接近,且背景均值均约为0。背景减除过后目标灰度得以较好留存,背景被抑制。
阈值分割结果如每组图(c)所示,图中红圈内白点为真实目标。图3(c)、4(c)、5(c)结果并无差异,这是由于阈值分割过程中速度阈值为固定值,目标速度对背景灰度值不造成影响,对图像进行阈值分割后,导致原本在图像内与目标灰度相差很大但大于速度阈值的背景点被划分为目标,背景点并没有随目标速度的改变而被抑制,导致阈值分割结果没有随目标速度变化而改变。因此,需进一步进行多帧图像速度匹配滤波实现目标检测。
基于以上讨论设计一种先检测后跟踪的多帧点目标检测方法,检测步骤主要包括:1)输入图像;2)采用均值滤波预测背景,进行背景减除;3)求出图像各个像元的运动速度,生成速度矩阵;4)将马赫数大于5的点保留;5)输入下一帧图像,重复步骤2)至步骤4);6)做相邻两帧间速度匹配滤波;7)满足速度要求则判定为目标,不满足则剔除;8)判断轨迹数量与图像帧数,满足条件则目标检出,否则继续步骤5)至步骤7)。
仿真使用图像大小为80像元×64像元,则图像共含有5 120个像元,左上角第一个像元记为1,从左至右,从上至下对每个像元X进行处理,直至右下角最后一个像元5120。检测过程中,实时记录当前图像序列帧数以及图像中包含的轨迹数量,详细仿真检测流程如图6所示。
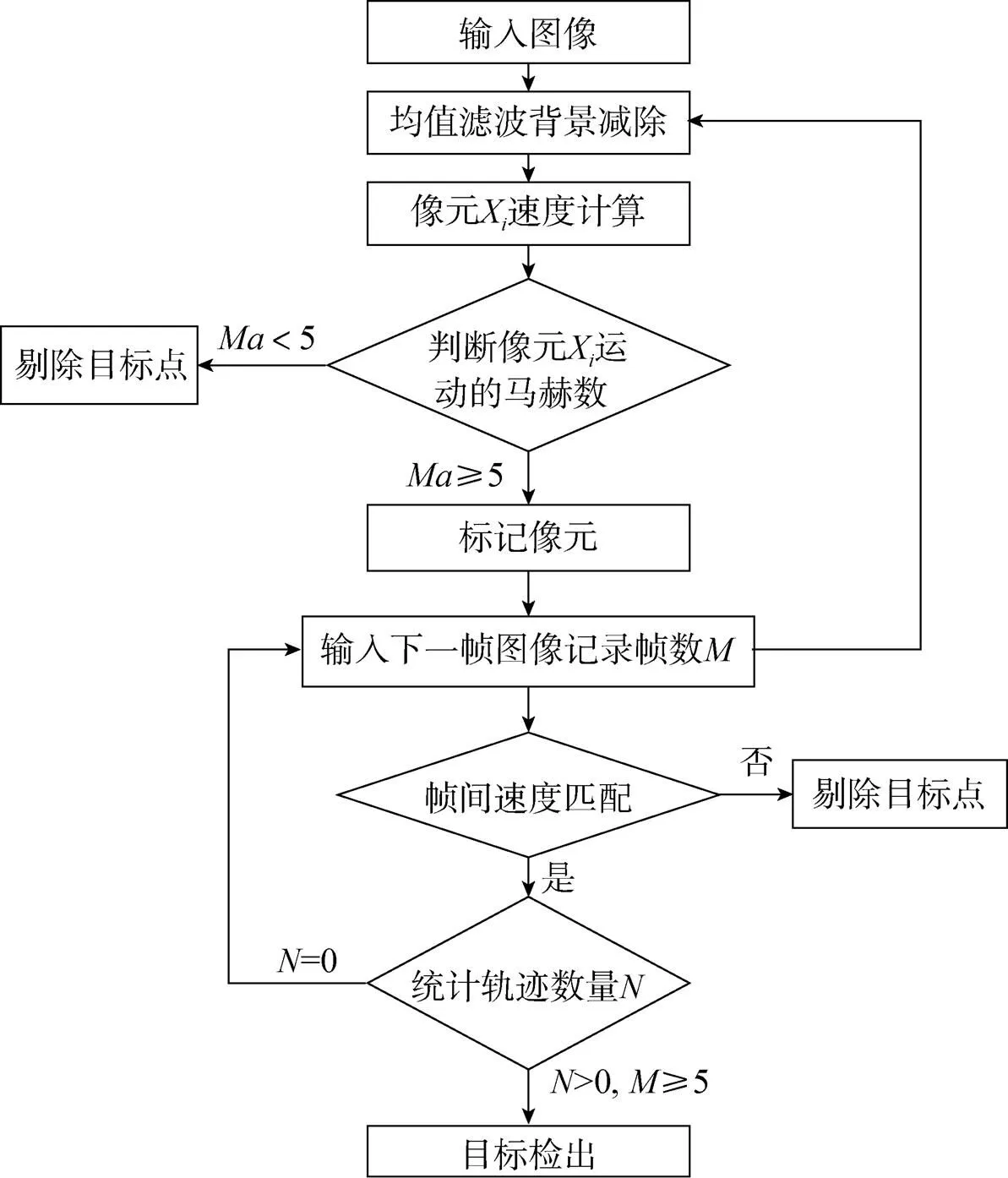
图6 检测算法流程
分别采用基于自适应阈值分割的检测方法及本文提出的检测方法对1000组不同的遥感图像序列进行高超声速目标检测,每个序列含20帧图像,图像大小为80像元×64像元。试验中自适应阈值分割在图像均值滤波后进行,图像信噪比计算中默认目标信号值为全图最大值,其加权系数取0.8;基于自适应阈值分割的检测方法中阈值分割过程与速度滤波过程是独立的,无速度匹配滤波,无帧数记录;检测结果见表3。
表3 检测结果统计

Tab.3 Detection result statistics
由表3可知:自适应阈值分割中,虚警与漏检均出现在目标速度较低时,由于自适应阈值分割考虑了图像全局的灰度分布,且加权系数不易确定,目标速度较低时,目标易被划分为背景或大量背景被划分为目标,导致漏检和虚警。
本文提出的高超声速点目标检测方法在阈值分割的同时,也进行了第一次速度滤波,目标不会被划分到背景区域,整个检测过程中有两次速度滤波,利用遥感图像序列中少量图像实现了高超声速目标检测。虚警出现在目标速度较低且图像中含大量云层边界时,此时图像含大量与目标灰度值相近的信号,阈值分割过程中被保留,多帧检测过程中虚假目标聚集形成轨迹导致虚警;背景一致时,由于速度阈值确定,目标速度变化不会导致分割结果变化,目标速度快时速度特征明显,在二次速度滤波过程中能顺利检出;但目标速度较快且有大尺度的机动变轨时,会造成二次速度匹配滤波失败,导致漏检。
3 结论
本文计算了光学系统入瞳处接收到的HTV-2不同飞行高度和飞行速度条件下的光谱辐射强度,从遥感图像灰度值计算和目标表面平均温度与速度的关系出发,将目标在图像内的灰度与其运动速度进行关联,提出了一种以目标飞行速度作为阈值选择条件的单帧图像分割方法,并进行图像帧间速度匹配滤波,实现多帧图像高超声速目标检测。该方法有以下优点:
1)与常规先检测后跟踪方法相比,本文提出的检测方法图像分割与速度滤波同时进行,背景抑制与目标单帧检测并行,提高了后续多帧检测效率;
2)检测过程中实现了单帧速度滤波,目标不会被划分到背景区域,并与多帧速度匹配滤波结合,两次速度滤波处理可有效提高检测率,降低虚警率。
仿真计算结果及对比试验分析表明:本文提出检测方法能有效检测出高超声速目标,该检测方法检测率为94.4%,虚警率为5.86×10−5%,比基于自适应阈值分割的目标检测方法的检测率高1.6%,虚警率低5.54×10−5%。
本文提出的检测方法具有一定的工程价值,研究内容对后续天基红外高超声速目标检测的研究具有一定的参考意义。但是该检测算法仍有不足之处,下一步工作需要进一步精确目标工况与表面温度的关系,优化图像分割过程中速度阈值的确定方法。
[1] 戴静, 程建, 郭锐. 临近空间高超声速武器防御及关键技术研究[J]. 装备学院学报, 2010, 21(3): 58-61. DAI Jing, CHENG Jian, GUO Rui. Research on Near-space Hypersonic Weapon Defense System and the Key Technology[J]. Journal of the Academy of Equipment Command & Technology, 2010, 21(3): 58-61. (in Chinese)
[2] 王路, 邢清华, 毛艺帆. HTV-2目标特性分析[J]. 飞航导弹, 2014(7): 22-24+71. WANG Lu, XING Qinghua, MAO Yifan. Target Characteristics Analysis[J]. Winged Missile Journal, 2014(7): 22-24+71. (in Chinese)
[3] 杨天远, 周峰, 行麦玲. 空间扫描相机点目标采样系统设计[J]. 航天返回与遥感, 2016, 37(2): 82-91. YANG Tianyuan, ZHOU Feng, XING Mailing. Design of Point Target Sampling System of Space Scanning Camera[J]. Spacecraft Recovery & Remote Sensing, 2016, 37(2): 82-91. (in Chinese)
[4] 龙亮, 王世涛, 周峰, 等. 空间红外点目标遥感探测系统在轨辐射定标[J]. 航天返回与遥感, 2012, 33(2): 73-80. LONG Liang, WANG Shitao, ZHOU Feng, et al. In-orbit Radiometric Calibration Methods for Remote Sensing System to Detect Space Infrared Point Target[J]. Spacecraft Recovery & Remote Sensing, 2012, 33(2): 73-80. (in Chinese)
[5] 牛少卿. 复杂背景下红外弱小目标检测算法研究[D]. 武汉:华中科技大学, 2013. NIU Shaoqing. Study of Infrared Small and Weak Target Detection in Complex Background[D]. Wuhan: Huazhong University of Science & Technology, 2013. (in Chinese)
[6] 梁敏. 红外弱小目标检测与跟踪技术研究[D]. 西安:西北工业大学, 2007. LIANG Min. Research on Infrared Weak and Small Target Detection and Tracking Technology[D]. Xi’an: Northwestern Polytechnical University, 2007. (in Chinese)
[7] 吕凭乐, 赵丹新, 孙胜利. 天基微弱运动点目标检测研究综述[J]. 红外, 2017, 38(1): 1-5. LYU Pingle, ZHAO Danxin, SUN Shengli. Overview of Space Weak Moving Point Target Dectction[J]. Infrared, 2017, 38(1): 1-5. (in Chinese)
[8] 丁中干. 强杂波干扰红外图像海面弱目标检测技术研究与实现[D]. 武汉: 华中科技大学, 2016. DING Zhonggan. A Research and Implementation of the Sea-surface Dim Target Detectionon Strong Clutter Jamming Infrared Image[D]. Wuhan: Huazhong University of Science & Technology, 2016. (in Chinese)
[9] OTSU N. A Threshold Selection Method from Gray-level Histogram[J]. IEEE Transactions on Systems, Man and Cybernetics, 1979, 9(1): 62-66.
[10] 李锋, 阚建霞. 基于Sobel算子的图像快速二维最大熵阈值分割算法[J]. 计算机科学, 2015, 42(z1): 209-210+220. LI Feng, KAN Jianxia. Fast Two-dimensional Maximum Entropy Threshold Segmentation Method Based on Sobel Operator[J]. Computer Science, 2015, 42(z1): 209-210+220. (in Chinese)
[11] 龙建武, 申铉京, 陈海鹏. 自适应最小误差阈值分割算法[J]. 自动化学报, 2012, 38(7): 1134-1144. LONG Jianwu, SHEN Xuanjing, CHEN Haipeng. Adaptive Minimum Error Thresholding Algorithm[J]. Acta Auto Matica Sinica, 2012, 38(7): 1134-1144. (in Chinese)
[12] 王忆锋, 陈洁. 高超声速飞行器的红外辐射特征及其红外探测预警[J]. 战术导弹技术, 2011(2): 55-57. WANG Yifeng, CHEN Jie. Analysis of Infrared Detection and Early Warning for Hypersonic Vehicle[J]. Electro-optic Technology Application, 2011(2): 55-57. (in Chinese)
[13] 杨霄, 牛青林, 贺志宏, 等. 类HTV-2高超声速滑翔飞行器红外辐射特征与可探测性分析[J]. 光学学报, 2017, 37(12): 37-46. YANG Xiao, NIU Qinglin, HE Zhihong, et al. Analysis of Infrared Characteristics and Detectability of HTV-2 Type Vehicle[J]. Acta Optica Sinica, 2017, 37(12): 37-46. (in Chinese)
[14] GLASS D E, DIRLING R, CROOP H, et al. Materials Development for Hypersonic Flight Vehicles[C]//14thAIAA/AHI Space Planes and Hypersonic Systems and Technologies Conference, November 06-09, 2006. Canberra, Australia: NASA Langley Research Center, 2006, 8122: 1-13.
[15] ACTON J M. Hypersonic Boost-glide Weapons[J]. Science & Global Security, 2015, 23(3): 191-219.
[16] 周金伟, 李吉成, 石志广, 等. 高超声速飞行器红外可探测性能研究[J]. 光学学报, 2015, 35(5): 54-61. ZHOU Jinwei, LI Jicheng, SHI Zhiguang, et al. Research on Infrared Detectability of Hypersonic Vehicle[J]. Acta Optica Sinica, 2015, 35(5): 54-61. (in Chinese)
[17] 陈钱, 钱惟贤, 张闻文. 红外目标探测[M]. 北京: 电子工业出版社, 2016: 1-12. CHEN Qian, QIAN Weixian, ZHANG Wenwen. Infrared Target Detection[M]. Beijing: Publishing House of Electronics Industry, 2016: 1-12. (in Chinese)
[18] 童锡良, 周峰. 星载红外点目标探测系统瞬时视场优化模型[J]. 航天返回与遥感, 2017, 38(6): 54-64. TONG Xiliang, ZHOU Feng. IFOV Optimization Model for Space-based Infrared Point TargetDetection System[J]. Spacecraft Recovery & Remote Sensing, 2017, 38(6): 54-64. (in Chinese)
Detection of Hypersonic Moving Point Target
TANG Hongchen1XU Peng1RUAN Ningjuan1,2QIU Minpu1
(1 Beijing Institute of Space Mechanics & Electricity, Beijing 100094, China)(2 Beijing Key Laboratory of Advanced Optical Remote Sensing Technology, Beijing 100094, China)
In order to reduce the missed detection rate and the false alarm rate in detecting infrared motion point target, the paper uses HTV-2 as an example to calculate the radiation characteristics of hypersonic vehicles under various operating conditions. A detection method based on target velocity and radiation characteristics is proposed. From the perspective of infrared remote sensing image generation, the velocity of the hypersonic target is correlated with its gray level, and then is used as the single-image gray threshold segmentation to realize the threshold segmentation and the velocity filtering simultaneously. The inter-frame suspected targets are processed by secondary velocity filtering to realize target detection. The simulation results show that the geostationary orbit infrared detection system can achieve hypersonic vehicle detection in the common spectral segments. The detection method proposed in the article has excellent detection effect on hypersonic targets with a detection rate of 94.4% and a false alarm rate of 5.86×10–5%.The method can be applied to the detection of a plurality of different infrared moving point targets with the corresponding relationship between the target surface average temperature and velocity.
hypersonic vehicle; radiation characteristics; threshold segmentation; point target detection; space remote sensing
TN216
A
1009-8518(2018)06-0046-09
10.3969/j.issn.1009-8518.2018.06.006
2018-06-14
国家重大科技专项工程
唐宏晨,男,1991年生,2014年获西北工业大学光信息科学与技术专业理学学士学位,现于中国空间技术研究院飞行器设计专业攻读硕士学位。研究方向为空间光学遥感器总体设计。E-mail:castthc@163.com。
(编辑:夏淑密)
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
军民两用技术与产品(2022年2期)2022-06-01
凤凰动漫(军事大王)(2022年1期)2022-04-19
北京航空航天大学学报(2021年6期)2021-07-20
集装箱化(2021年1期)2021-04-12
天津医科大学学报(2021年1期)2021-01-26
中国信息技术教育(2020年2期)2020-02-02
民用飞机设计与研究(2019年4期)2019-05-21
科技与创新(2016年18期)2016-11-04
太空探索(2016年7期)2016-07-10
