3T1R并联机构降耦设计与分析
2019-01-05 07:45朱小蓉沈惠平杨廷力
农业机械学报 2018年12期
朱小蓉 胡 旸 沈惠平 杨廷力 朱 伟
(常州大学机械工程学院, 常州 213164)
0 引言
3T1R并联机构由于能实现沿x、y、z轴的平动和绕固定轴(通常为z轴)的转动,可用于分拣、包装、码垛、装配等操作,在工业中得到大量应用。最初的3T1R并联机构是在3-DOF Delta机器人[1]的基础上加装中间UPU支链以实现绕z轴的独立转动。在此之后,提出了一系列由4支链和铰接双动平台组成的3T1R并联机构[2-8],如H4、I4、Par4、Heli4、CrossIV等;文献[9-14]提出了一类结构对称、具有4支链和刚性单动平台的3T1R并联机构。上述能实现3T1R运动的并联机构中,含铰接双动平台的机构,通过2个子动平台的相对运动和特定设计的传动装置能实现较大旋转角,最大转动范围可达[-90°,90°],但该类机构的结构和运动学都较为复杂;而刚性单动平台3T1R机构,由于支链耦合、机构奇异性的影响,这些机构的工作空间特别是转动范围受限,且这些机构的耦合度较大(κ=2),其运动学正解、动力学分析求解复杂。因此,为满足工程实际应用需要,还需要对解耦及大转动能力的3T1R并联机构进行更多的研究。
根据基于方位特征(Position and orientation characteristic, POC)方程的并联机构拓扑结构设计理论,文献[15]提出了3种拓扑结构降耦设计原理和方法,其中,基于运动副复合的设计方法,在降低机构耦合度的同时,使机构的结构设计、制造变得更简单,已成为并联机构拓扑结构降耦设计的一种主要方法[16-18]。
文献[19-21]提出了一种具有较好应用前景的四自由度Quadrupteron并联机构,能实现三平移和绕动平台法线的一个转动输出,但机构的耦合度较高(κ=2),且机构的转动能力受限。本文采用基于运动副复合的设计方法,对其进行结构降耦,以得到一种自由度和末端件输出运动类型保持不变,但机构耦合度降低,且具有运动解耦的新机型。
1 降耦并联机构
1.1 机构降耦设计
1.1.1Quadrupteron并联机构

图1 Quadrupteron并联机构Fig.1 Kinematic diagram of Quadrupteron
Quadrupteron并联机构如图1所示[22],由1条CRR支链(Leg 1)和3条CRRR支链(Leg 2、Leg 3、Leg 4)连接定平台和动平台;与动平台相连的4个R副的轴线与动平台的法线相互平行;每条支链上其余的C副和R副轴线互相平行。
易知,当定平台上4个C副的移动作为驱动时,动平台可实现三平移和绕动平台法线的转动输出;同时,该机构由1个基本运动链(BKC)组成,且耦合度κ=2,其运动学正解及动力学正反解求解复杂。
1.1.2降耦设计
文献[15]提出的基于运动副复合的结构降耦设计方法,已对多种耦合度较高的并联机构进行了拓扑降耦优化设计[15-18]。由于Quadrupteron机构动平台上的4个R副轴线平行,可以通过合并的方法达到机构结构降耦的目的。
保持CRR支链(Leg 1)不变,首先将图1所示Quadrupteron并联机构的2条CRRR支链(Leg 2和Leg 3)上与动平台连接的2个转动副重合,合并成RD副,移至动平台的中心;再拆开另1条CRRR支链(Leg 4)与动平台相连的R副,并通过末端执行件与RD副相连,则构成图2所示的新型降耦机构,记为(3CRR/R)&CRRR并联机构。

图2 (3CRR/R)&CRRR降耦并联机构Fig.2 (3CRR/R)&CRRR decoupled PM
这样,降耦机构由静平台0、中间平台1和末端执行件2组成。其中,静平台0和中间平台1之间由转动副R12、R13、R22、R23、R32、R33和圆柱副C11、C21、C31及相应构件组成,且满足C11‖R12‖R13、C21‖R22‖R23、C31‖R32‖R33,装配时C11、C21、C31互相正交;另一支链由C41、R42、R43和R44(正交的两转动副R43、R44可采用万向节代替,记为U43)组成;旋转轴RD固定在中间平台1上,且垂直于中间平台1;主动输入为C11、C21、C31、C41的移动。
1.2 拓扑结构特征分析
1.2.1机构的POC计算
并联机构的POC方程[22]为
(1)
(2)
式中MJi——第i个运动副的POC集
Mbi——第i条支链末端的POC集
MPa——机构动平台的POC集
m——运动副数
v——独立回路数
静平台0与中间平台1及3条Ci1Ri2Ri3(i=1,2,3)支链可看成一子并联机构。
确定中间平台1的POC集为

即子并联机构可看成是1条三平移输出的等效支链SOC{-P-P-P-}。
末端执行件的POC集为

因此,机构自由度为4,具有空间任意方向的移动和绕垂直于中间平台1法线方向的转动,与Quadrupteron机构输出特性相同。
1.2.2机构的自由度计算
并联机构DOF公式[22]为
(3)

(4)
v=m-n+1
式中F——机构自由度
fi——第i个运动副的自由度
n——构件数
ξLj——第j个独立回路的独立位移方程数

Mb(j+1)——前j+1条支链末端构件POC集
机构所含的独立回路数为
v=m-n+1=14-12+1=3
机构的拓扑结构路线可以分解为
SOC1{-C11‖R12‖R13-R23‖R22‖C21-}
SOC2{-C31‖R32‖R33-}
SOC3{-RD‖R44⊥R43‖R42‖C41-}
由式(4)得

其构成子并联机构PM(1-2)的自由度和POC集为
由式(2)得
其子并联机构PM(1-3)的自由度和POC集为
由式(2)得

由式(3)得
因此,该降耦机构的自由度仍为4,当取静平台0上C副的移动作为驱动副时,末端输出件2可实现3个平移及1个转动的运动输出。
1.2.3机构耦合度κ计算
由基于序单开链(Single open chain, SOC)的机构组成原理[22]可知,任一机构可分解为约束度为正、零、负的3种有序单开链(SOC),第j个SOCj的约束度定义为
(5)
式中mj——第j个SOCj的运动副数
Ij——第j个SOCj的驱动副数
进一步,一组有序的v个SOC可组成一个零自由度的独立回路数为v的基本运动链(Basic kinematics chain, BKC),对一个BKC而言,须满足
(6)
因此,BKC的耦合度为
(7)
已计算出机构3个回路的独立位移方程数,分别为ξL1=5,ξL2=4,ξL3=5,因此,由式(5)可得:
SOC1的约束度为
SOC2的约束度为
SOC3的约束度为
则SOC3构成另一基本运动链BKC2,耦合度κ2=0。
1.2.4降耦机构运动解耦性分析
对图2所示的降耦机构进行解耦性分析如下:
(1)降耦机构可分解为2个BKC,如图3所示。其中,BKC1由SOC1和SOC2构成,即由静平台0、中间平台1及其间的3条Ci1Ri2Ri3(i=1,2,3)支链组成;另一个BKC2由C41、R42、U43、RD组成。

图3 降耦机构的拓扑结构组成Fig.3 Topological structure of decoupled PM
(2)由于机构的4个驱动位于不同的BKC,满足文献[22]的并联机构解耦性准则条件,则降耦机构具有部分自由度,即机构输出具有运动解耦。
(3)末端输出件2的位姿取决于所有主驱动输入,与其相邻的中间平台1(包括转动副RD)的位姿取决于部分输入;末端输出件2与中间平台1的平移运动重合,同时,末端件2绕转动副RD相对于中间平台1以角φ旋转。
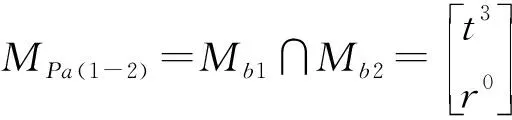
用同样的方法,对Quadrupteron机构进行了上述的拓扑结构特征分析,分析结果如表1所示。
结果表明,降耦机构的自由度、POC集与Quadrupteron相同,均为3T1R;但运动副数和构件数均有所减小,故降耦机构的结构设计、制造更为简单;从拓扑结构组成来看,Quadrupteron由一个BKC组成,耦合度κ=2;而降耦机构由两个BKC组成,耦合度分别为1和0,且降耦机构的输出具有部分解耦性,表明降耦机构的运动学正解及动力学分析的难度将会大大降低。
表1 两种并联机构的拓扑结构特征Tab.1 Topological structure characteristics of two PM
2 运动学分析
静平台采用框架形式,建立如图4所示定坐标系Oxyz,z轴与C11轴线平行,x轴平行于C31轴线;θi1(i=1,2,3)分别为构件A1B1与x轴、构件A2B2与x轴、构件A3B3与z轴的夹角;4个移动驱动滑块分别安装在间距为L的4个轨道上;驱动副行程为ρ,安装中心分别记为Gi(i=1,2,3,4);每个分支的定长杆AiBi及BiCi长度设为lij(i=1,2,3;j=1,2)。

图4 并联机构运动示意图Fig.4 Kinematic diagram
在中间平台1的N点建立动坐标系Nuvw,v轴平行于转动副R23轴线方向,w轴平行于中间平台1的法线;点Ci(i=1,2,3)是转动副Ri3(i=1,2,3)在中间平台1上的安装基点,其特征参数是r,且有|NCi|=r(i=1,2,3),并设Ci在Nuvw坐标系下的位置矢量为ri,βi(i=1,2,3)为NCi与u轴的夹角,如图5所示。

图5 中间平台1上运动副的分布Fig.5 Distribution of pairs on moving platform-1

图6 基本运动链BKC2示意图Fig.6 Sketch of BKC2
基本运动链BKC2的结构如图6所示,θ41为构件A4B4与x轴的夹角;定长杆A4B4及B4C4杆长分别为l41、l42;末端输出件C4D长度为l。
设驱动副的输入变量为ρ=(ρ1,ρ2,ρ3,ρ4),末端输出件基点D位姿为x=(xD,yD,zD,φ),则4条支链存在以下关系:
支链1
(8)
支链2
(9)
支链3
(10)
C4坐标满足如下关系
(11)
式中h——转动副安装基点D与点N距离,见图6
则由式(8)~(11),可得
ρ2-rsinβ2=ρ4-lsinφ
(12)
2.1 机构位置正解
已知机构的输入位移(ρ1,ρ2,ρ3,ρ4),求末端输出点D的位姿(xD,yD,zD,φ),即为位置正解。
由式(8)~(12),有
(13)
sinφ=(ρ4-ρ2+rsinβ2)/l
(14)
解式(14),可得:
(1)当|ρ4-ρ2+rsinβ2|/l<1时,φ有两组解
φ1=arcsin(|ρ4-ρ2+rsinβ2|/l)
(15)
φ2=arcsin(|ρ4-ρ2+rsinβ2|/l)+π
(16)
(2)当|ρ4-ρ2+rsinβ2|/l=1时,φ有一组解。
(3)当|ρ4-ρ2+rsinβ2|/l>1时,φ无解。
分析表明,对于给定的、非奇异输入,末端执行件有两组姿态;而当初始装配情形确定后,机构的运动学正解具有唯一性。
2.2 机构位置反解
已知末端输出基点D的位姿(xD,yD,zD,φ),求机构的输入位移(ρ1,ρ2,ρ3,ρ4),即为位置反解。
由式(13)、(14)可直接得出机构反解方程为
(17)
对式(13)、(14)整理,可得末端基点的输出矩阵形式为
(18)
式中 ·——输出常数
fi(·)——结构参数构成的函数
由式(18)可知,该机构的解耦性具有两层含义:①末端输出件的位置与姿态具有拓扑解耦特性。②末端输出的移动本身具有解耦特性,且具有各向同性,这为控制带来了方便。
3 机构雅可比矩阵及奇异性分析
3.1 机构雅可比矩阵
将式(17)对时间t求导,整理得
(19)

用矩阵A和B来分析机构奇异特性,并记J=A-1B为机构的雅可比矩阵。
3.2 奇异性分析
并联机构接近或到达奇异位形时,动平台将变得不可控。基于机构的雅可比矩阵,GOSSELIN等[23]将并联机构的奇异位形分为3类:正解奇异、反解奇异及混合奇异。发生正解奇异的条件是:|B|=0、|A|≠0,此时即使驱动副固定,机构末端仍能运动;当|A|=0、|B|≠0时,机构出现反解奇异,在发生反解奇异时,末端执行元件会失去一个或多个自由度;当正解奇异和反解奇异同时发生时,发生混合奇异。
对于(3CRR/R)&CRRR降耦并联机构来说,奇异分析包括两部分:①BKC1奇异,即静平台0、中间平台1及3条Ci1Ri2Ri3(i=1,2,3)支链组成子并联机构部分的奇异。②BKC1和BKC2组成的3回路(记为:BKC1+BKC2)机构的奇异。
3.2.1BKC1奇异分析
由式(19)前3项可知,三平移输出子并联机构的雅可比矩阵为正交单位矩阵,不存在正解奇异;对反解奇异,当每条Ci1Ri2Ri3(i=1,2,3)支链的3个运动副轴线共面时发生,属于工作空间的边界奇异。因此,解耦3CRR子并联机构在全工作空间内部不存在奇异位形。
3.2.2BKC1+BKC2奇异分析
(1)反解奇异
由式(19)可知,A是单常数阵,|A|恒不等于0,故不存在反解奇异。
(2)正解奇异
由|B|=0可得
cosφ=0
(20)
式(20)有两组解,即φ=π/2、φ=-π/2。这2个奇异姿态将降耦机构的工作空间分为2个无奇异工作空间区域:① 无奇异区域Ⅰ(-π/2<φ<π/2),此时cosφ>0。② 无奇异区域Ⅱ (π/2<φ<3π/2),此时cosφ<0。
只要机构远离这2个姿态(φ=π/2和φ=-π/2),则机构不会发生反解奇异。
(3)混合奇异
由于|A|=0及|B|=0不可能同时成立,故机构不存在混合奇异位形。
3.2.3无奇异工作空间内运动学正解的分布
以上分析可知,机构无奇异工作空间包括:无奇异区域Ⅰ和无奇异区域Ⅱ;而运动学正解分析表明,机构存在两组运动学正解。根据式(15)、(16)、(20)可知,机构运动学正解的2个公式分别对应机构的无奇异工作空间区域Ⅰ和Ⅱ,如表2所示。

表2 机构无奇异工作空间区域内运动学正解Tab.2 Forward kinematics among singularity-free workspace
一旦机构装配形式给定,则确定了机构的无奇异工作区域,根据表2的计算公式可直接计算出机构的唯一运动学正解。
图4所示构型处于无奇异工作区域Ⅰ,则可采用式(13)、(15)进行运动学正解求解,这进一步简化了机构的运动学正解分析过程。
4 工作空间分析
对于3T1R并联机构,通常研究定姿态工作空间和可达工作空间。定姿态工作空间为机构动平台姿态保持一定时,动平台上参考点所能到达的区域;可达工作空间,是动平台上参考点以至少任一姿态能够到达的点的集合。
对大多数3T1R并联机构而言,动平台不同的姿态对应的工作空间大小不同,且相差较大。
由式(13)可知,本文提出的降耦并联机构,末端执行件3个方向的平移运动只与机构3个方向的驱动输入参数分别相关,与姿态角φ无关,故下文直接讨论机构的可达工作空间。
4.1 可达工作空间
式(13)表明,机构可达工作空间是3个方向圆柱体相贯形成的一个空间几何体[20],每个圆柱体的外径等于对应支链的两定长杆杆长之和|li1+li2|,而内径等于两杆杆长之差|li1-li2|。假设,保持支链定长杆长度不变,且li1=li2=1(无量纲),驱动副行程范围为ρ,令λ=ρ/|li1+li2|;并合理定位基座上移动副的驱动位置,以保证空间3个圆柱体相交体积最大化,则工作空间形状及大小随驱动副行程的变化情况如表3所示。
由表3可知,工作空间随λ的增大先增加后保持不变,整个工作空间形状规则,且无内部空洞;当λ≤1时,工作空间是边长为ρ的立方体;当λ>1时,工作空间形状为一多面体;当λ>1.675时,工作空间形状和体积均保持不变。因此,为使机构结构紧凑、且获得规则形状的较大工作空间,驱动副行程不超过支链两定长杆长度之和。
表3驱动副行程对工作空间体积的影响
Tab.3Influenceofdrivingstrokeonworkspace

4.2 转动能力分析
由式(14)可知,末端机构的转动姿态仅仅决定于2个输入参数ρ2和ρ4,如保持ρ2、ρ4的驱动关系不变,可达工作空间内每一位置转动能力均相同;且每一位置的无奇异转动范围均为:φ∈(-π/2,π/2)或φ∈(π/2,3π/2)。
目前研究的文献中,除采用特殊的放大机构外,大多数3T1R并联机构的转动范围均在[-90°,90°]之内,且工作空间内点的转动能力差异较大。
5 算例
为便于性能比较,参照Quadrupteron样机结构参数,机构主要尺寸参数如表4所示[20]。增加的末端执行件C4D的长度为40 mm,移动副驱动行程为220 mm,机构三维虚拟装配如图7所示。
5.1 运动学正反解算例
由图7可知,该装配形式使得机构总工作在无奇异区域Ⅰ,给定两组主动输入参数:①ρ1=0,ρ2=0,ρ3=0,ρ4=0;②ρ1=10,ρ2=40,ρ3=30,ρ4=20。运用式(15)、(13),求得对应的实数正解,如表5中序号①和②所示。

表4 机构的几何参数Tab.4 Geometric parameters of mechanism mm
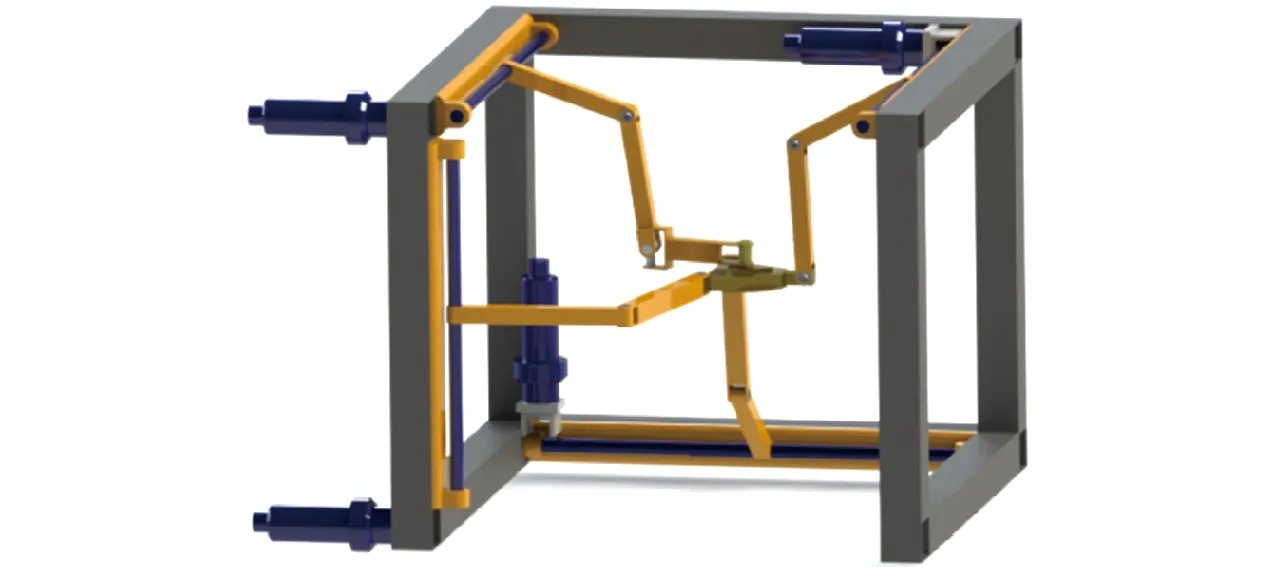
图7 降耦并联机构的CAD模型Fig.7 CAD model of decoupled parallel mechanism
将表5中①、②正解数据,代入反解式(17)中,可得实数反解(序号③和④)。它与上述给定的输入参数一致,故认为正反解求解正确。
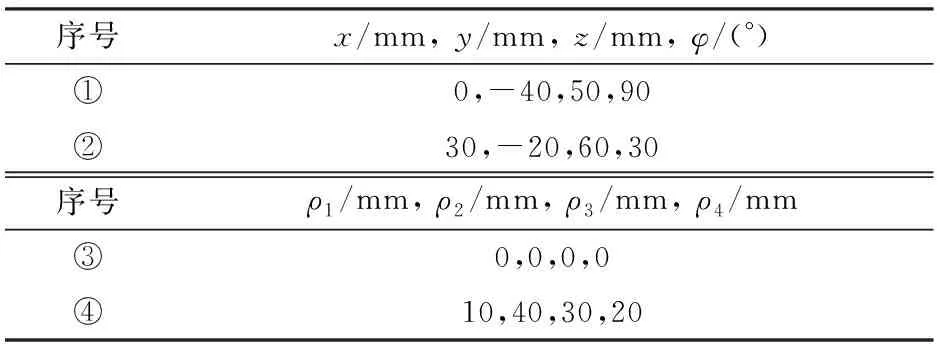
表5 (3CRR/R)&CRRR机构位姿正反解算例Tab.5 Positive and inverse solution example of(3CRR/R)&CRRR
5.2 工作空间及转动能力分析
由4.1节和4.2节分析可知,不考虑机构约束时,机构可达工作空间是一规则立方体,边长为驱动副行程,即机构工作空间是边长为220 mm的立方体,且工作空间内每一位置的转动能力均一致,为(-90°,90°),且无内部奇异。
由于各被动关节转角限制以及杆件可能发生干涉,实际工作空间小很多。本文基于位置反解式(17),采用搜索法求解出满足约束条件的所有点,再利用所有满足约束条件的“点集”近似求解出工作空间体积。求解步骤如下:
(1)根据经验初步估算出工作空间的搜索范围为:35 mm≤XD≤315 mm,31 mm≤YD≤365 mm,0≤ZD≤270 mm。
(2)基于位置反解式(17)求解并联机构的输入参数(ρ1,ρ2,ρ3,ρ4),同时满足如下约束条件:①支链各被动关节的转角必须限制一定范围:-75°≤θi1≤75°,15°≤θi2≤165° (i=1,2,3)。②驱动副行程为220 mm。③根据奇异条件,末端输出件2的转动姿态必须满足(-90°,90°)。
(3)给定末端输出件姿态角φ,并将步骤(1)中的初始化输出参数代入反解式(17)中。
(4)选取搜索步长因子Δx=Δy=Δz=10 mm,若通过步骤(1)~(3)计算的结果满足所有约束条件,则为工作空间内有效点,否则返回步骤(1),并按步长依次改变末端件的输出位置参数。
根据表4给定的机构参数,在Matlab中编程计算,求解给定姿态φ下的“点数”nφ,而每个点可视为边长为Δx的小正方体。因此,可求得定姿态下工作空间体积为(单位:mm3)
Vφ=nφ(Δx)3=103nφ
(21)
采用同样的步骤,对Quadrupteron机构的定姿态工作空间体积进行计算。图8是不考虑转动关节角度限制时,(3CRR/R)&CRRR降耦机构和Quadrupteron[20]的Vφ与φ的关系曲线。
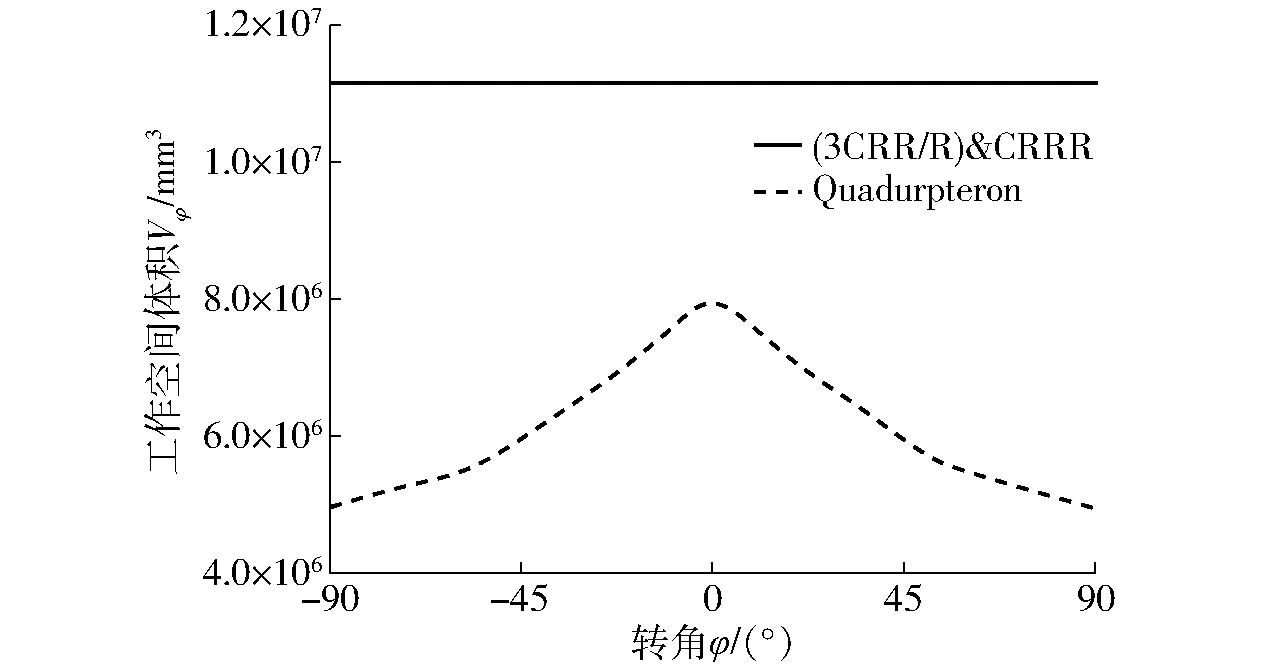
图8 定姿态工作空间体积随φ的变化(不考虑约束)Fig.8 Changes of Vφ with φ (without constraints)
由图8可知:①对(3CRR/R)&CRRR降耦机构,全工作空间转动能力保持不变,即工作空间内所有位置点的转动能力一致,工作空间体积达1.11×107mm3。②对于Quadrupteron机构,在姿态角为0°时,定姿态工作空间体积达最大,Vφmax=8.33×106mm3;当姿态角接近±90°时,定姿态工作空间体积最小,Vφmin=4.95×106mm3;其最小、最大工作空间体积降幅达40%以上,与文献[21]的结论一致。因此,降耦机构的定姿态工作空间体积及转动能力较Quadrupteron并联机构都有显著提升。
5.3 降耦机构的实际定姿态工作空间
图9是考虑转动副角度范围限制时,降耦机构(3CRR/R)&CRRR定姿态工作空间体积随末端输出姿态φ的变化情况。由图9可知:①考虑运动副转角范围限制后,降耦机构实际定姿态工作空间体积有所减小,可见,合理设计被动关节的安装角,可提高并联机构的工作空间。②降耦机构在初始姿态,即φ=0时,定姿态工作空间体积达最大,约为9.398×106mm3;随着姿态角的增加,定姿态工作空间体积减小;当转角接近±90°时,定姿态工作空间体积最小,为6.519×106mm3。故在考虑转动约束的情况下,降耦机构定姿态工作空间体积的最大降幅达30%,小于Quadrupteron在理想状态下最小、最大工作空间的降幅(大于40%)。这进一步表明,考虑转动副角度范围限制时,降耦机构的实际定姿态工作空间比Quadrupteron机构有较大改善。
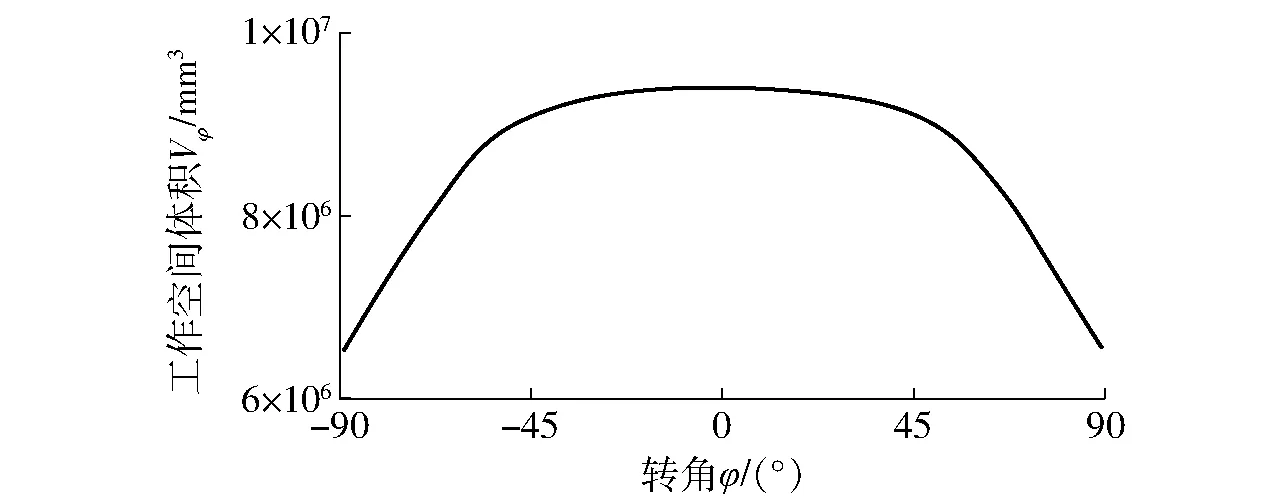
图9 (3CRR/R)&CRRR机构的Vφ与φ关系曲线(考虑约束)Fig.9 Relationship curve between Vφ with φ(with constraints)
6 结论
(1)通过运动副复合的方法,对Quadrupteron并联机构进行降耦设计,提出了一种耦合度较低的3T1R新机型。
(2)该降耦机构具有输出运动解耦特性,机构3个方向的移动输出与3个输入参数一一对应,而转动姿态与其中2个输入参数相关。
(3)机构结构简单、运动学正反解方程更简单,方便制造、控制。
(4)在(-90°,90°)输出转角范围内,机构无内部奇异存在;且机构具有较大体积的规则工作空间,全工作空间内所有位置的转动能力一致。
(5)该降耦机构克服了一般并联机构耦合性强、控制复杂的弱点,转动能力大幅度提高,具有较好的工业应用前景。
猜你喜欢
防爆电机(2022年1期)2022-02-16
农业机械学报(2021年10期)2021-11-09
河北省科学院学报(2020年1期)2020-05-25
重型机械(2019年3期)2019-08-27
时代金融(2016年29期)2016-12-05
商场现代化(2016年1期)2016-03-18
海军航空大学学报(2015年1期)2015-11-11
中国人口·资源与环境(2015年1期)2015-01-13
北京航空航天大学学报(2014年1期)2014-12-19
食品工业科技(2014年13期)2014-12-16