观察级ROV结构设计及研究
2018-12-29 03:40:34
制造业自动化 2018年12期
(西安工业大学,西安 710021)
0 引言
争夺海洋资源成为了这几年的焦点,由于人类无法亲自对深海进行探测和开发,因此我们就需要借助各种高技术的工具、手段来认识海洋和探索海洋空间。探索海洋空间必不可少的重要工具之一就是水下机器人[1],有缆遥控水下机器人(ROV)在水下探索、水产养殖、渔业打捞等领域具有非常广阔的前景和重要的意义。本文目的在于设计并研制出具有自主知识产权的、应用于浅水水域的水产养殖及渔业打捞的小型模块化ROV系统。在研究现有ROV的基础上,根据设计指标和工作环境等因素,设计了一款浅水观察级ROV。该ROV的结构选定为开架式结构,利用铝合金材料构成的整体框架,使得框架有足够的强度与刚度,同时,也有较大的内部空间。
1 ROV系统总体设计
ROV系统主要由机器人本体、地面操控箱和缆线组成,为了增强检查效果,特配备视频眼镜。其中,机器人本体部分包括耐压舱体、照明和观测模块、传感器监测系统、推进系统、控制系统和通信等;地面操控系统包括显示屏、操作手柄、状态指示、导航定位系统、数据采集和处理软硬件系统等;使用缆线将地面操控台和水下机器人本体连接,地面操控台通过脐带缆将控制指令发送给机器人本体,并且收集机器人拍摄到的视频信息和传感器的信息[2]。ROV系统结构示意图如图1所示。
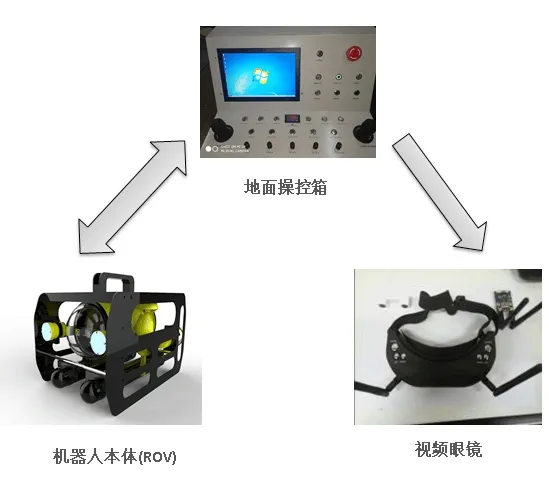
图1 ROV系统结构示意图
2 ROV本体的组成
耐压舱体、照明和观测模块、传感器监测系统、推进系统、控制系统和通信系统共同构成了ROV的本体。本体机械结构图如图2所示。
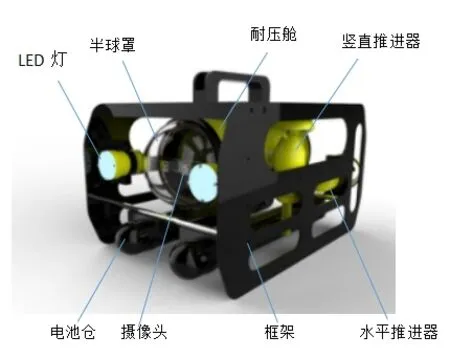
图2 本体机械结构图
2.1 耐压舱体
耐压舱由半球罩、舱体和后盖组成。它里面有摄像头、检测仪器、电子通讯设备和电路板等非承压非耐水构件,必须密封防水。因此,耐压舱的强度和水密性是ROV下水的关键。耐压壳体有密闭的空间,能提供浮力,耐压舱的质量与ROV本体的总质量的比值要尽量小,故耐压舱的材料选用有机玻璃。
2.2 推进系统
动力推进系统是由ROV本身携带的电池仓部分和推进器部分组成的。电池仓位于耐压舱下部,两侧对称安装与框架上,电池仓自带电池为ROV水下提供电力。推进器部分由两个水平推进器和两个竖直推进器对称安装。
2.3 照明和观测系统
在光线充足的陆地上摄像机拍摄视频很容易,而在光线特别稀少的水里,不能拍摄到清晰的视频,需要增加光线强度,因此,在机器人上安装了LED灯和摄像头。当光线不足时,打开LED灯,能够为摄像机提供充足的光,采集到的图像就能满足要求,将摄像机收集到的图像通过缆线传送到地面控制台显示屏显示,当对某些特别重要的图像需要保存时,使用机器人自带的录像模块进行记录。
2.4 传感器检测系统
本文设计的水下机器人的传感器监测系统由电子罗盘、深度传感器、温度传感器和压力传感器组成。地面控制台负责接收通过缆线传递的传感器监测到的压力、温度、深度和航向等信息。
3 校核与仿真分析
3.1 框架的校核与分析
框架是各种零件和设备的载体,结构的可靠性是保证ROV正常工作的前提。对于框架没有较好的经验公式和理论规范来计算,只能依靠软件进行分析。用三维建模软件SolidWorks对本文的ROV进行整体建模,并将框架模型导入Ansys中,进网格划分、施加载荷与约束和进行运算[3]。ROV的极限深度为50米,受到的压力是0.5Mpa,仿真中压力输入值即0.5Mpa。将所产生的力简化成集中力施加到相应的接触面上,得到图3所示的应力分析云图和图4所示的总变形分析云图。仿真结果显示,框架的最大应力为4.9182MPa,最大位移为0.01782mm,满足强度和稳定性设计要求。
3.2 舱体的校核
3.2.1 舱体的壁厚校核
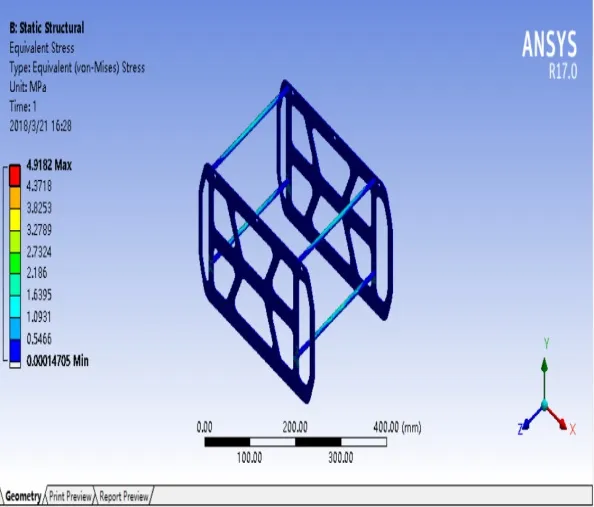
图3 应力分析云图
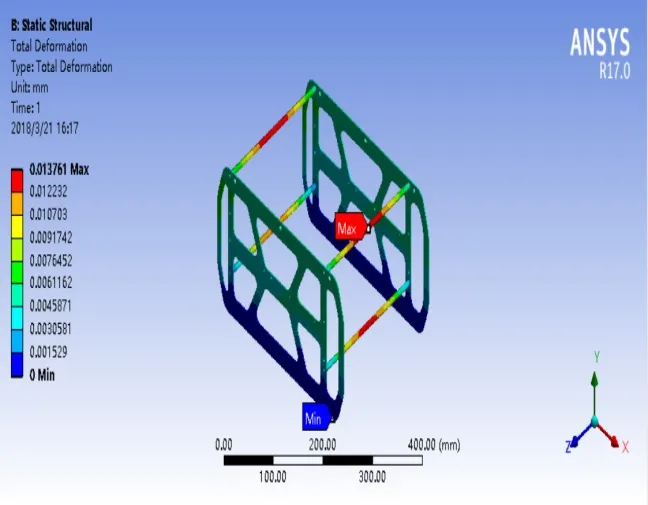
图4 总变形分析云图
有机玻璃的透光率比较高,机械强度也很高,可以塑性变形、低弹性模数,可重新分配应力以及允许局部屈服等都是有机玻璃的优点;而且有机玻璃在大量破坏前会变成半透明或出现很多裂纹,可以提供使用者即将寿命到期的线索信息。因此选用无色透明的亚克力作为耐压舱体的材料。表1所示为亚克力材料的力学性能参数。
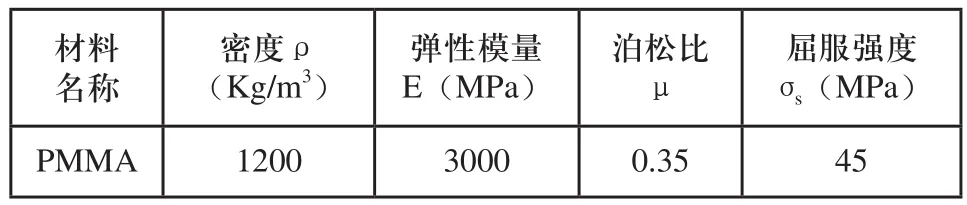
表1 亚克力的力学性能参数
考虑到真实的水下工作环境的影响,为了ROV的使用安全性,初步取密封舱壳体的厚度为4mm。ROV潜入水中的深度为50米时,依据劳氏规范安全系数至少2.5[4]。
令δ=4mm,计算临界压力及安全系数如式:
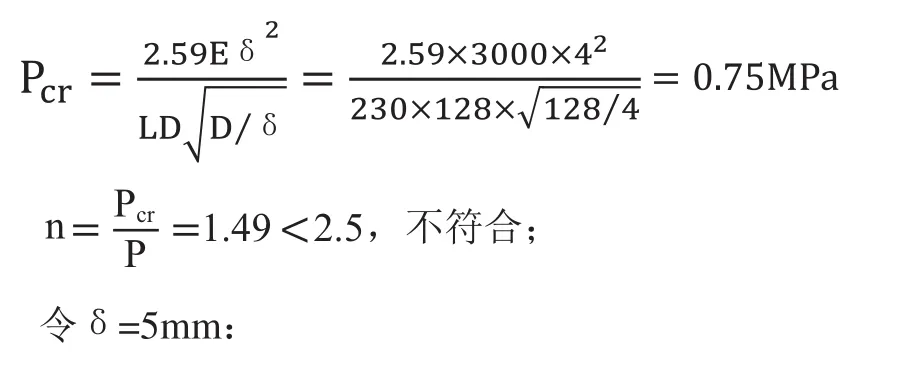
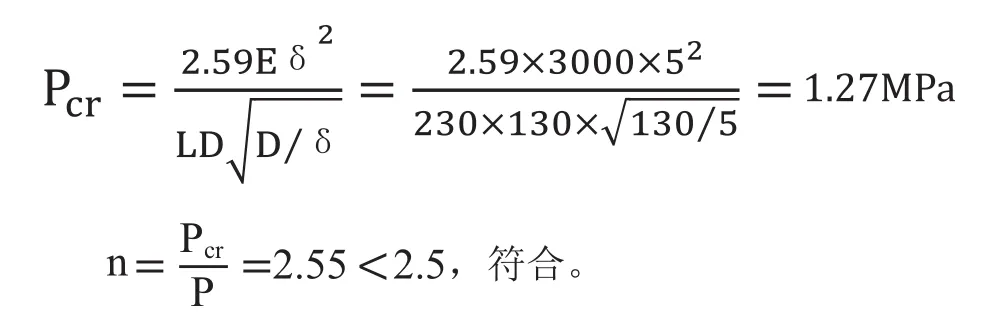
考虑上述计算结果,中间筒体设计为:外径等于130mm,壁厚等于5mm,长度为230mm。内径120mm。即5mm壁厚的亚克力耐压舱在水下50m的环境下能保证舱体结构的安全。
3.2.2 舱体的强度校核
经过对舱壁的设计,使得达到指定的强度和刚度后,让舱体的分量最小。由于δ=5mm,即外径D=130mm,依据毁坏结果,将受外力的圆柱形壳体分为长圆筒、短圆筒,其判断公式为(1):

圆筒长度为L=230m,显然:Lcr>L,因而,能够判断该设计的壳体是短圆筒类型。
有许多解算公式能够得出短圆筒的临界压力,但米塞斯(Mises)公式是应用最普遍的式[5],式(2):

式中:Pcr为壁厚为δ的耐压舱筒体可以承受的临界压力;
E为PMMA的弹性模量;
R为密封舱筒体的半径,R=D/2;
N为失稳波数;
L为耐压舱筒体的长度;
μ为PMMA的泊松比。
简化后,短圆筒的最小临界压应力公式:
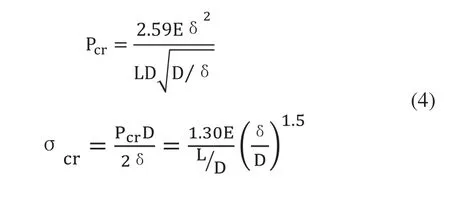
将已知量代入式(4),计算耐压舱壳体的最小临界压应力如下:

由计算结果可知,耐压舱壳体的应力值为8.32MPa,而亚克力的许用应力为22.5MPa,显然,耐压舱壳体的压应力小于许用应力的值,即耐压舱壳体的强度满足要求。
3.2.3 舱体稳定性校核
校核ROV的结构的稳定性时,应该使计算所得的ROV壳体的应力小于材料所允许的许用应力,而且还要保证ROV壳体的稳定性满足要求;否则壳体的失稳将会产生巨大的弯曲应力,而使密封电子舱受到破坏[6]。本文的稳定性理论研究是基于能量法之中的比较常见的一种方法—李茨法,推导圆柱形耐压壳体的稳定性公式。
由于密封舱体为短圆筒。将尺寸参数代入式(3),计算最小临界压力相应波数如下:

取整后N=3。
按照ROV的设计任务要求,最大潜水深度为50米时工作压力为0.5MPa。类比工作深度与计算深度之间的关系,工作压力与计算压力的关系:

上面已经计算5mm的耐压舱壳体的临界压力为Pcr=1.27MPa>Pj=1MPa,即ROV密封电子舱体的稳定性符合要求,最小临界压力相应的失稳波数为3。
3.3 舱体仿真分析
ROV进行设计时,对工作深度和极限深度都有定义。在设计耐压舱时,采用计算深度作为计算依据。计算深度一般取工作深度的1.25~1.5倍。为对耐压舱强度和稳定性进行校核,使用Ansys对耐压舱的结构进行仿真计算,50m水深下取最大值0.75MP,经过分析,耐压舱的应力分析云图和总变形分析云图如图5、图6所示。

图5 应力分析云图
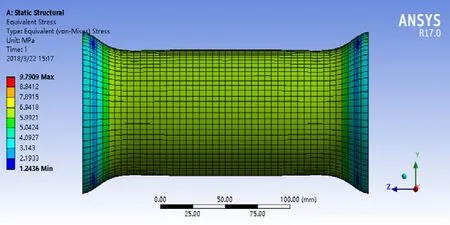
图6 总变形分析云图
从图中可以看出,最大应力为9.7909MPa,位移最大变形量也不过0.094mm。
通过软件分析,框架的最大变形量0.0182mm,可以忽略不计,不影响POV正常工作,最大应力4.9182MPa远小于材料的许用应力69MPa,故框架的强度和刚度满足要求。5mm壁厚的亚克力耐压舱在水下50m舱体结构安全,理论计算耐压舱体的应力值为8.32MPa,软件仿真仿真耐压舱的最大应力9.7909MPa,而亚克力的许用应力为22.5MPa,显然,耐压舱体的压应力小于许用应力的值,即耐压舱壳体的强度满足要求。
4 结束语
本文主要设计了一种应用于浅水水域的水产养殖及渔业打捞的小型模块ROV系统,解决了浅水养殖相关应用方面的难题。通过本体机械结构,介绍了ROV本体各部分组成,阐述了各部分的功能和作用。为了验证设计的可靠性,从理论计算与有限元分析两个方面入手,着重对框架结构和耐压舱的耐压强度及稳定性进行分析,得出以下结论:
1)通过仿真,框架在0.5MPa下,位移满足安全性和稳定性要求。
2)5mm壁厚的亚克力耐压舱在水下50m的环境下能保证耐压舱体结构的安全。
设计的耐压舱壳体的应力值为8.32MPa,而亚克力的许用应力为22.5MPa,显然,耐压舱壳体的压应力小于许用应力的值,即耐压舱壳体的强度满足要求。
该研究为浅水观察级ROV的实现鉴定了理论基础,为框架式ROV的设计提供了有效的方法。
猜你喜欢
舰船科学技术(2022年11期)2022-07-15 07:50:56
航天制造技术(2021年5期)2021-11-06 07:02:40
舰船科学技术(2021年12期)2021-03-29 01:28:16
知识窗(2021年1期)2021-02-23 20:52:13
河北画报(2020年10期)2020-11-26 07:21:14
上海航天(2020年3期)2020-07-01 01:20:50
装备制造技术(2020年12期)2020-05-22 09:25:02
石油化工建设(2019年6期)2020-01-16 08:03:44
中国特种设备安全(2019年9期)2019-12-03 09:25:30
少儿科学周刊·少年版(2019年1期)2019-04-18 00:53:38