
关于LTI系统完全响应的时域解法分析
2018-12-28 06:48:40郑江云
安庆师范大学学报(自然科学版) 2018年4期
郑江云
(安庆师范大学物理与电气工程学院,安徽安庆246133)
冲激函数平衡法(或称冲激函数匹配法)是线性时不变连续时间系统(LTI)时域分析的重要方法,该方法既可用于求由0-时刻到0+时刻的状态转换,也可用于直接求解各种激励作用下系统的零状态响应,一些教材和教学参考书都介绍了这种方法[1-2],但都不详细,给教和学带来了较大的困惑。文献[3]介绍的是一种代入方式;文献[4]对冲击函数匹配法的两种计算方式没有从理论上进行说明,也没有介绍初始状态不等于零的完全响应的求解过程;文献[5]只给出了系统的单位冲激响应的几种方法,没有涉及有初始值的完全响应的求解。因此,本文从理论上阐明冲击函数匹配法的两种应用,并通过典型例题完全响应的求解,使冲激函数匹配法的解法完整明朗。
1 集总参数线性时不变连续时间系统模型
集总参数线性时不变连续时间系统的数学模型为常系数线性常微分方程:

(1)式中,r(t)为系统的响应,e(t)为输入激励信号。由时域经典解法可知,(1)式的完全解由齐次解和特解组成,齐次解rh(t)满足(1)式右端激励e(t)及其各阶导数都为零的齐次方程:

式中,rh(t)解的形式与特征方程的特征根有关,它有n个待定系数。
特解rp(t)的形式与激励函数形式有关。将激励e(t)代入(1)式的右端,观察自由项试选特解函数式,代入后求得特解函数式中的待定系数,即可给出特解rp(t),则完全解:

(3)式中齐次解的n个系数仍然是待定的。下面分别介绍求解待定系数的两种方法。
2 由0-状态导出0+状态求解待定系数
一般激励是从t=0时刻加入,这样系统的响应区间定为0+≤t<∞,系统在激励信号加入之前有一组状态,定义为

(4)式简称0-状态。在激励信号e(t)加入之后,由于受到激励的影响,这组状态从t=0-到t=0+时刻可能发生变化,确定(3)式中未知数是由响应区间内t=0+时刻的一组状态确定的,如下所示:简称0+状态。

(1)式响应r(t)的0-状态到0+状态有没有跳变,决定于微分方程的右端自由项是否包含δ(t)及其各阶导数。如果包含有δ(t)及其各阶导数,说明相应的0-状态到0+状态发生了改变,这时为了确定0+时刻的值,可以用冲激函数匹配法。下面通过具体例子来说明。
例1给定系统微分方程:
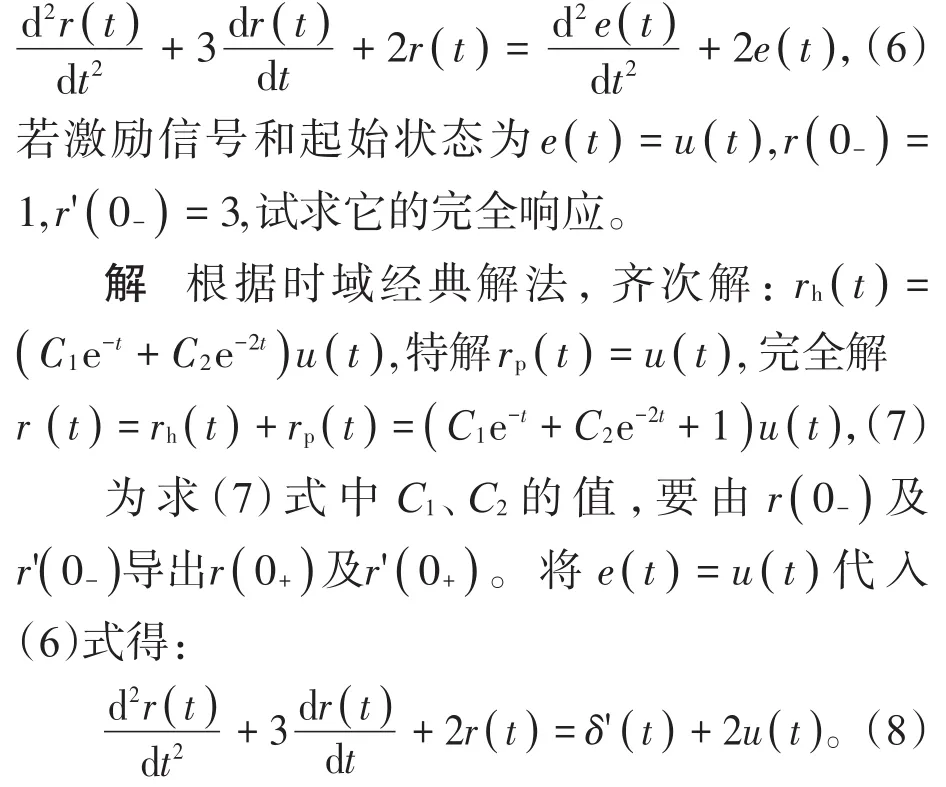


其中,(9)~(11)式中0-<t<0+,Δu(t)表示0-到0+相对单位跳变函数[6],所以Δu(t)的积分等于零。将(9)~(11)式代入(8)式:

由(12)式得出a=-3。由(10)、(11)式得

即得r(0+)=1+1=2,r'( 0+)=3-3=0,将这两个值代入(7)式得方程组:

3 系数待定的完全解直接代入法求零状态响应
上节介绍的经典方法是严格按照步骤从0-状态导出0+状态,再由0+状态求出待定系数,下面介绍的方法省去求0+状态的过程,使问题简化。
例2仍然以例1表示的系统为例,介绍求解过程。
解(7)式中的r(t)是(6)式表示系统的完全解,对r(t)逐次求导:

将(7)、(15)、(16)式和e(t)=u(t) 代入(6)式得:

但(18)式和例1中求得的结果(14)式不一样,难道哪种方法是错的吗?是的,方法2在解的过程都没有用到0-状态的值,所以它求得的仅仅是零状态响应rzs(t),要想求出完全响应,还要求出零输入响应rzi(t),而rzi(t)的求法简单,它就是微分方程的齐次解,又因为没有输入,电路状态不会发生跃变,即0+状态和0-状态相等。下面求方程(6)所示系统的rzi(t),

完全解应该是(18)和(20)式相加的结果,即(6)式所示系统的完全响应为

(21)式所示结果与(14)式就一致了,这表明两种方法都是正确有效的。显然,例2的直接代入法求解过程比第一种方法简单,不需要从0-状态求出0+状态,但直接代入法只能求出零状态响应,要求出有初始值的完全响应,必须加上零输入响应。第一种方法解法虽然繁琐一些,但它求出的结果直接就是完全响应。
4 结束语
通过两个例题的求解过程介绍了有初始值的完全响应的解法,两种方法虽然都用到了冲激函数平衡法,但思路是不同的。例1是将输入函数代入系统方程的右端,根据右端的特点反推系统输出r(t)的最高阶导数在t=0+时刻的函数形式,然后将最高阶导数逐次积分直到响应r(t),并将这些表达式代入系统方程,再结合0-状态的值就可以求出0+状态,最后由0+状态求出完全解中的待定系数;例2中的方法是先将完全响应分解为零输入和零状态响应,零输入响应根据初始值就可以求解,零状态响应rzs(t)是由齐次解和特解组成,将rzs(t)逐次求导直到系统方程中响应的最高阶函数,再把这些表达式全部代入系统方程,根据冲激系数平衡法,直接求出rzs(t)中的待定系数。
0-状态到0+状态的跃变难以理解,求解过程复杂,而只要将完全响应分解为零输入和零状态响应,用例2中介绍的将系数待定的完全解直接代入求零状态响应,所以在教学和解题过程中尽量避免直接求出0+状态的方法,可以避免介绍一些难以理解的概念。
猜你喜欢
中学生数理化·七年级数学人教版(2022年5期)2022-06-05 07:51:46
环球人物(2022年4期)2022-02-22 22:05:06
中学生数理化·七年级数学人教版(2021年5期)2021-11-22 07:24:36
小资CHIC!ELEGANCE(2021年32期)2021-09-18 06:17:14
中学生数理化(高中版.高二数学)(2021年4期)2021-07-20 07:18:48
新世纪智能(数学备考)(2020年12期)2020-03-29 02:15:38
数学大世界·中旬刊(2017年3期)2017-05-14 17:41:25
高中生学习·高三版(2016年9期)2016-05-14 14:05:08
爆笑show(2015年4期)2015-06-24 01:55:12
新高考·高二数学(2014年7期)2014-09-18 17:56:35
