
基于模糊PID的汽车自适应巡航控制策略研究
2018-12-28 11:54李世豪吴岩卢羽
汽车实用技术 2018年23期
李世豪,吴岩,卢羽
(长安大学汽车学院,陕西 西安 710064)
前言
ADAS(Advanced Driving Assistance System)是传统汽车走向无人驾驶汽车的重要实现路径,是智能驾驶的最好落脚点,汽车的智能化和安全化已经成为国内外研究热点。自适应巡航系统(ACC)能够在特定环境下代替驾驶人,使其免于对制动踏板和加速踏板的操作,有效的减轻了驾驶人的疲劳、降低了道路的交通事故率。
目前,国内外对ACC系统的研究主要集中在控制策略方面,根据信息感知单元获取的前车动态进而控制执行单元,如油门控制器、制动控制器和挡位控制器。文献[1]根据自车的加速度对ACC工况进行划分,将ACC工况分为巡航、稳态跟随和瞬态跟随。但是并未充分考虑到前车加速度对ACC车辆的影响。文献[2]基于自适应神经网络设计了 ACC控制器,但由于算法复杂,不能被广泛应用。本文综合考虑各个控制算法的优缺点,选择模糊PID控制对汽车纵向ACC的上层控制器进行设计,根据车载雷达采集的非线性数据,在线调整PID控制器参数,提高系统的动态响应。
1 自适应巡航系统工作原理
自适应巡航系统是定速巡航系统的升级,是车速巡航系统与防撞预警系统的组合。在行车过程中,车载雷达通过识别车辆的周边环境,计算出前方车辆的速度、相对距离与加速度信息,车载ECU调节节气门的开度和制动主缸的压力,对自车的车速进行控制,保证与前方车辆的安全距离和相对车速,弥补了定速巡航系统的不足。
ACC系统属于汽车的纵向控制,主要包括六种控制模式:定速巡航、稳态跟随、接近前车、强加速、强减速、紧急避撞[1]。这六种控制模式是以自车与前车的相对速度和距离为前提进行区分的,驾驶人按照设定好定速巡航车速在道路上行驶,当检验到前方有障碍物即前车时,信息感知单元计算出vr和d,并将其传递到控制器,ECU计算得到期望加速度 a,并将其输入到执行单元,输出制动主缸压力和节气门开度,以达到期望加速度要求,如图 1所示为汽车 ACC系统的主要组成。
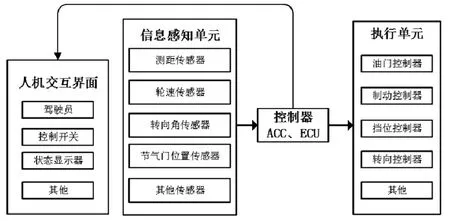
图1 汽车ACC系统的主要组成
汽车自适应巡航系统控制器包括两部分,即上层控制器和下层控制器。上层控制器通过相对车速vr和相对距离d选择相应的控制策略,计算出期望加速度 a。下层控制器控制发动机和制动器,使汽车的实际加速度趋于期望加速度 a。本文的汽车自适应巡航控制策略的研究主要是针对上层控制器的设计。
2 模糊PID控制策略的建立
模糊PID控制策略的工作原理如图2所示。
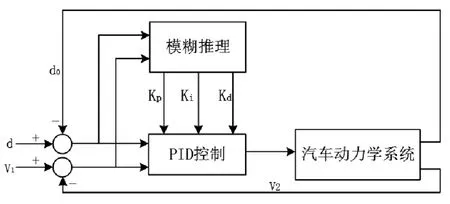
图2 汽车ACC系统模糊PID控制框图
上层控制器根据雷达测量前车的动态信息,计算得到ACC车辆的期望安全距离d0与实际距离d的差值△d,前车速度v1与实际速度v2的差值△v,将其作为模糊控制器和PID控制器的输入,由模糊推理原则得到PID控制器的参数Kp、Ki、Kd,通过实时在线调整,使其能够快速响应ACC车辆的道路交通环境。
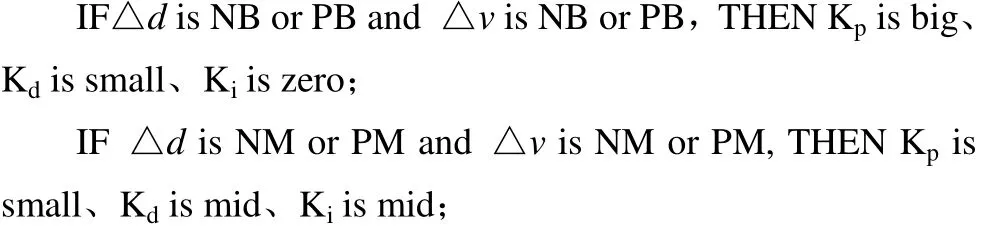
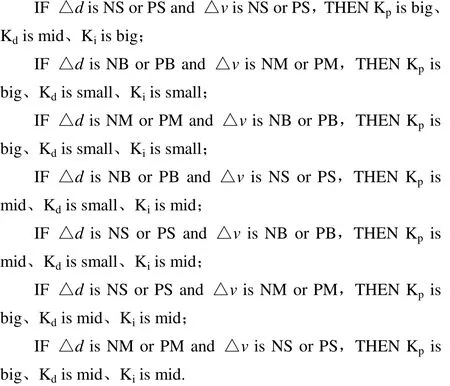
隶属度函数和模糊规则的选择与制定是模糊控制器设计的重点[1],从系统的稳定性、响应速度、超调量和稳态精度等方面来考虑,Kp的作用是加快系统的响应速度,Ki的作用是消除系统的稳态误差,Kd的作用是改善系统的动态特性。根据以上三个参数的不同作用,建立如下模糊规则:
确定 ACC系统的模糊规则后,还需要对模糊控制器输入的隶属度函数进行设计,对于输入变量△d和△v,采用高斯型隶属度函数。如图3、图4所示,其中△d的取值范围为[-10,10],△v的取值范围为[-30,30]。
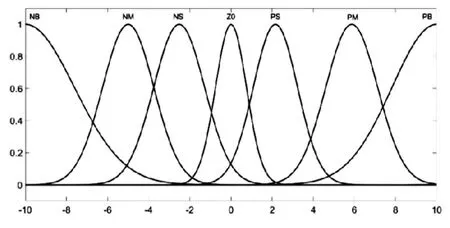
图3 △d的隶属度函数
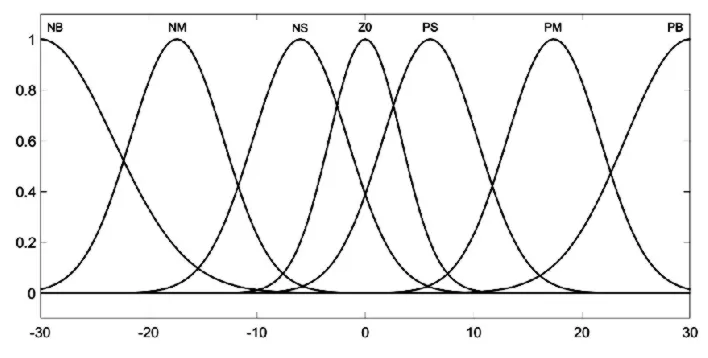
图4 △v的隶属度函数
由于模糊控制器的输出是一个模糊量,而PID控制器的输入是一个清晰量,因此应当用合适的方法将模糊量转化为清晰量(反模糊化),采用面积中心法解模糊化[1],即:
3 ACC系统控制策略仿真
在Matlab/Simulink仿真平台上,建立上述模糊PID控制策略,完成上层控制器的设计。选择Carsim车辆动力学软件作为下层控制器,以此来验证本文设计的ACC控制策略的控制效果。
如图5所示,ACC车辆以100km/h的车速在道路上行驶,在2.8s检测到前方车辆,车辆由定速巡航模式转换为强减速模式,当主车的车速降低到前车车速时,主车又切换到稳态跟随模式。根据上述图中的仿真曲线可得,制定的模糊 PID控制策略能够满足主车对前车速度的跟踪性能,安全距离与实际距离的误差在合适的范围内,满足安全性的要求,且主车的加速度变化范围较小,保证乘坐的舒适性。
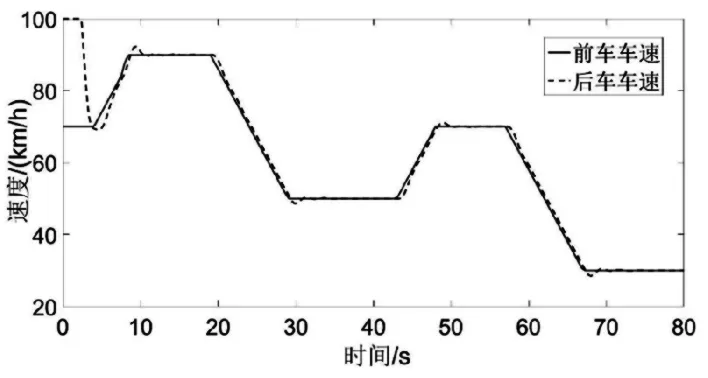
图5 主车车速跟随曲线
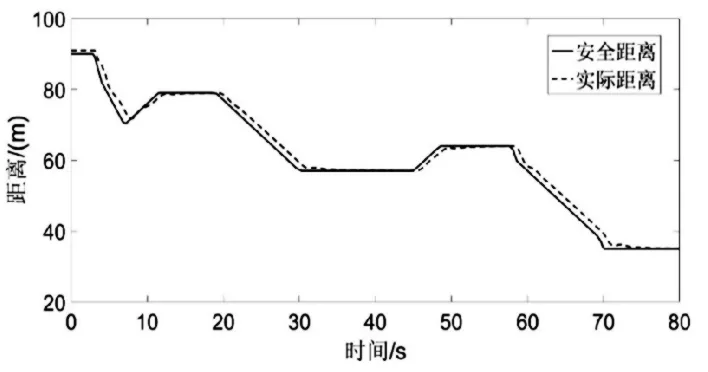
图6 安全距离与实际距离曲线
4 结论
1)根据自适应巡航系统的工作原理,分析自适应系统的上层控制器,对ACC系统的工作模式进行分类。
2)建立模糊 PID控制策略,制定合适的模糊规则和隶属度函数,保证实时准确控制PID控制器的参数。
3)利用Carsim和Simulink联合仿真平台,对控制策略进行仿真分析,验证其控制效果。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
能源工程(2022年2期)2022-05-23
建材发展导向(2021年11期)2021-07-28
汽车维修与保养(2019年1期)2019-05-05
汽车电器(2018年12期)2019-01-04
电机与控制学报(2018年9期)2018-05-14
汽车维护与修理(2018年1期)2018-04-04
汽车工程(2017年8期)2017-09-15
作文周刊·小学一年级版(2017年27期)2017-08-10
中学生数理化·高一版(2008年6期)2008-11-15
