
基于地面站跟踪的飞行器测控天线方向图精细化分析方法
2018-12-26 07:55宁高利王星来宫长辉贾云峰
导弹与航天运载技术 2018年6期
宁高利,王星来,韩 明,宫长辉,贾云峰
(北京宇航系统工程研究所,北京,100076)
0 引 言
测控天线是飞行器测控系统的重要组成部分,与地面测控站配合建立可靠的无线链路,共同完成飞行器飞行过程中的轨道测量、遥测、数据传输和指令控制[1,2]。天线方向图作为测控天线最重要的性能,直接影响天线安装角选择、地面测控站布站,乃至于飞行过程中天地无线链路的稳定性和可靠性[3]。
对于测控天线方向图的分析,一般是以天线在不同象限角区间内的二维方向图要求为依据,用测控天线安装在飞行器平台上的实测二维方向图集与之相比较,通过人工判读或者计算机作图的方式来完成。很显然,这种分析方法,是从天线自身出发,直接考察天线安装于载体平台后在各个空间角度的辐射强弱特性。这种方法的优点是直观、操作简便;缺点是分析不够精细,存在一定程度的近似,尤其是在对测控天线增益要求比较苛刻的应用场合,不利于从系统的角度对问题进行详细分析和判断。
由于在飞行器的实际飞行过程中,测控天线是通过与各地面测控站分时搭接跟踪而工作的,基于这种观点,本文提出一种基于地面站跟踪的测控天线方向图分析方法,通过详细分析对比飞行器飞行过程中各地面测控站的分段跟踪和无线链路电平情况,达到对测控天线方向图进行精细化分析的目的。
1 测控天线方向图分析
1.1 三维天线方向图的二维近似
测控天线安装于飞行器载体平台上,将发射机输出的射频功率转化成电磁波并以特定的空间分布特性辐射出去(或以特定的空间分布特性接收地面站发出的无线控制指令信号),而定量描述天线辐射(或接收)信号空间分布特性的指标就是方向图[4]。
严格的天线方向图的定义需引入辐射强度和增益两个指标。天线在某方向的辐射强度 (,)Uθϕ是该方向每单位立体角的辐射功率,即:

式中radP为天线的辐射功率;θϕ和分别为天线球面坐标系中的角度变量。
增益 (,)Gθϕ是该方向的辐射强度与天线以同一输入功率向空间均匀辐射的平均辐射强度的比值,即:

式中 Pin为天线的输入功率; F (θ,ϕ)为天线的归一化方向函数;η为天线的辐射效率。
将天线在全空间各个角度方向的增益以图形的方式表示出来就是天线的增益方向图,一般简称方向图。由上述定义可以看出,天线方向图应该是一个空间三维曲面S,属于三维立体图,直观地描述了天线辐射(或接收)的电磁场能量的空间分布特性[5]。
传统上,对于测控天线方向图的分析,一般是先将测控天线安装在飞行器平台(或等效工装)上,测出天线在飞行器各个象限角(一般是 0°~360°等间隔测量)面内的二维方向图{Pi},以此来近似天线的三维方向图S。这种方法实质上是对三维方向图的等间隔采样量化[6]。然后用天线在不同象限角区间内的二维方向图{Qi}要求作为依据,通过人工判读或者计算机作图的方式将测试的二维方向图集{Pi}和{Qi}相比较,对测控天线的方向图进行分析。在这种方法中,测控天线的方向图分析是从天线自身出发,直接考察天线安装于载体平台后在各个空间方位的辐射强弱特性。它的优点是直观、易于理解、操作简便、比较结果易于判读;缺点是分析不够精细,存在一定程度的近似,尤其是二维方向图要求的综合,不利于从系统的角度对问题进行详细分析和判断。一般地,安装于飞行器平台上的测控天线为了不对飞行器整体的气动特性产生较大影响,以及受制于飞行过程中的环境条件,多采用共形或准共形结构,而这类天线往往会在飞行器的首尾方向形成辐射零点区域,但对于地面测控站的接力跟踪,这些方向恰好是增益要求较高的地方[7]。因此在遇到对测控天线增益要求比较苛刻的情况时,精细化的分析方法就显得更为重要。
1.2 基于地面站跟踪的精细化分析方法
考察飞行器在飞行过程中的无线测控链路[8],飞行器按照设计的轨道,以特定的姿态角位于相应的空间位置点,飞行器平台上的测控天线按照自身的方向图特性向空间各个方向辐射无线电波,而地面测控站 A此时以其天线最大增益方向对准飞行器,对其进行跟踪测控,如图1所示。
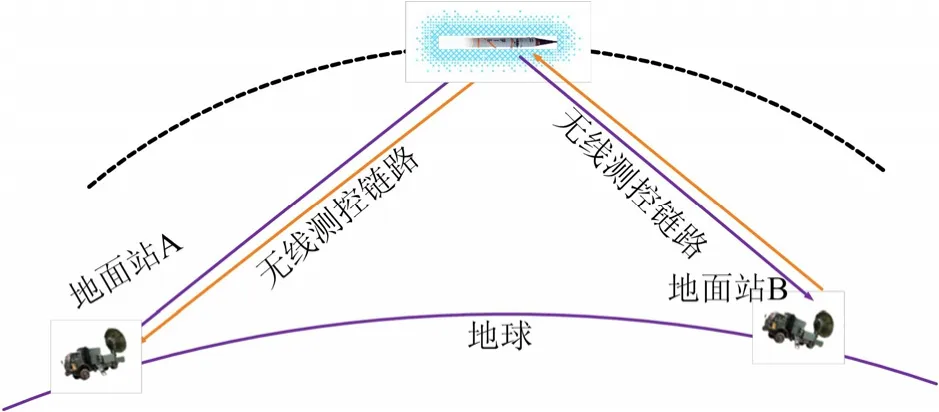
图1 地面站跟踪飞行器测控过程示意Fig.1 Illustration of TT&C of the Spacecraft Based on the Ground Station
地面测控站A与飞行器测控天线相位中心O的连线(测控线矢量)与其天线方向图S存在一个交点M,这个交点M的值MG即是此刻无线测控链路中测控天线贡献的增益值,如图2所示。
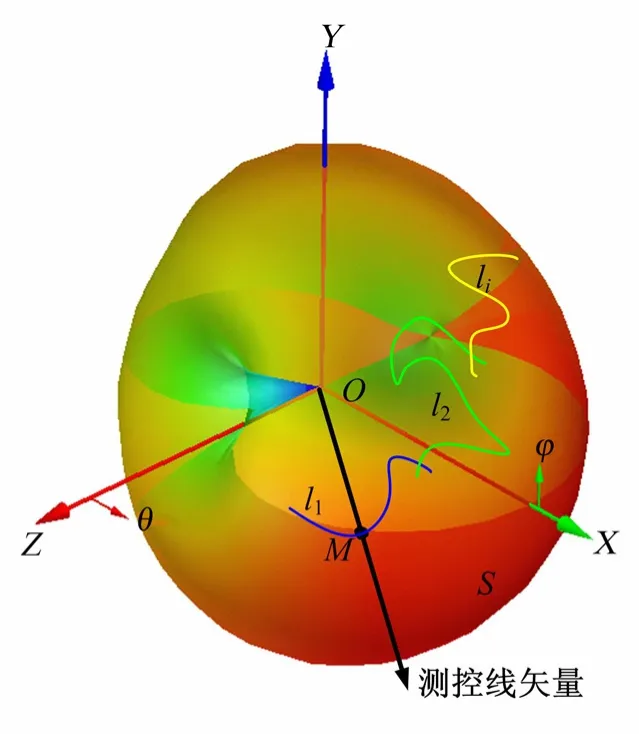
图2 测控天线方向图示意Fig.2 Illustration of the Radiation Pattern of the TT&C Antenna
随着飞行时间的推进,飞行器的空间位置点和姿态角都在按照既定轨道不断变化着,而地面站A也在不断调整跟踪天线的方位角和仰角,时刻保持以其最大增益方向对准飞行器。这样,前述的交点M也会随着时间的推进而在测控天线方向图 S上不断移动,从而绘制出一段三维空间曲线l1,如图2所示。随着飞行时间的不断推进,由于地面站A的天线仰角过小或飞行器到地面站A的斜距过大等因素会导致无线链路的电平值太小而无法建立可靠链路,此时需要另外一个地面站B布设在航区相应位置接替地面站A进行接力跟踪[9](实际中往往是地面站 B会提前开始跟踪,以保证两站有一段共同跟踪的搭接段,从而提高测控跟踪的可靠性)。同样地,地面站B在跟踪测控过程中也会在测控天线方向图S上绘制出一段空间曲线 l2,以此类推,地面站I跟踪测控过程中产生空间曲线li。曲线集{li} ,i = 1 ,2,...,N ,其中 N为站数,即是为满足全飞行过程中的可靠接力跟踪测控,飞行器测控天线应满足的增益曲线。
从飞行器测控?天线实际工作过程的角度出发,为满足地面测控站的接力跟踪,测控天线方向图真正应满足的增益要求为{li},属于三维空间曲线。更进一步,在飞行过程中,每一时刻ti,对应着空间曲线 li上的一点 Mi,该点的增益值为 Gi,而 Mi点又同时对应着一组跟踪角度( αi, βi), αi和 βi分别为该点在飞行器坐标系中的象限角和视角[10],如图3所示。
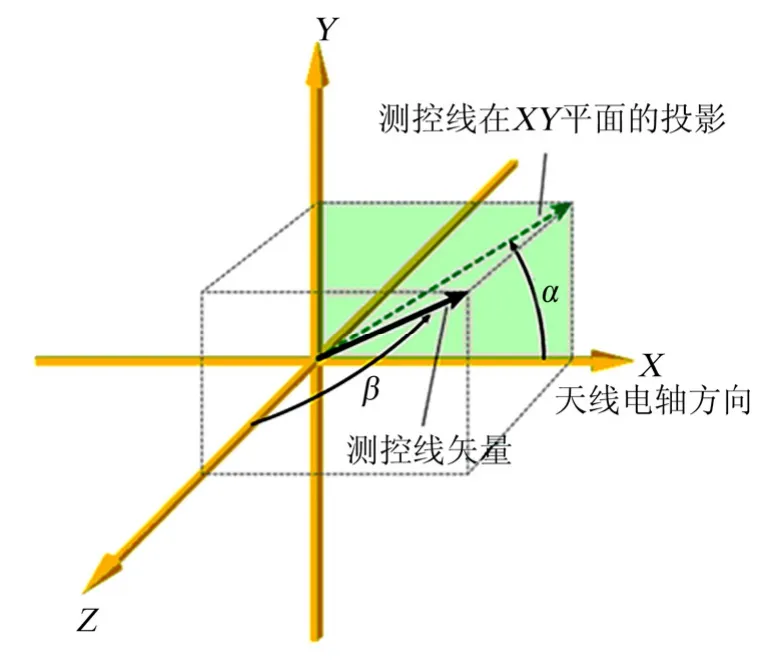
图3 飞行器坐标系中的象限角和视角定义Fig.3 Definition of the Quadrant Angle and Visual Angle in the Vehicle Coordinates
这样,以这些参数为元素构建矩阵H,H=[t,α,β,G],并以矩阵H作为对测控天线方向图进行精细化分析的依据。
同样地,首先应获得测控天线安装在飞行器平台(或等效工装)上后在各个象限角面内的二维方向图集{Pi},以此来近似天线的三维方向图S,然后遍历矩阵H中所有的时间t列数据,对于某个ti对应的跟踪角度( αi, βi),在{Pi} 中找到与( αi, βi)角度误差最小的点,该点的增益值为 GP,并求出二者的差值∆G=GP-Gi,若∆G≥0,则认为方向图中该点增益值能满足要求,否则,认为该点增益值不满足要求,并将其单独挑出,形成矩阵 K,K=[tj, αj, βj, Gj]。矩阵K即为对飞行器测控天线方向图采用基于地面站跟踪的精细化分析方法而得出的结果。
很显然,由于该方法是直接根据地面站跟踪测控天线的工作过程而提取出了天线方向图的增益曲线,并用空间曲线集{li}和二维方向图集{Pi}作比较,相比于传统的划区间近似出二维方向图{Qi} 后与{Pi}作比较,更为准确,尤其是在遇到对测控天线增益要求比较苛刻的情况时,更利于问题的精细化分析,能为系统设计提供更多的参考信息[11,12]。
2 测控天线方向图分析方法比较
以特定的飞行器测控任务为对象,对基于地面站跟踪的精细化分析方法进行具体的介绍,并与传统分析方法加以比较。
在该测控任务中,共有 3个地面测控站,分别布设在航区不同位置,接力跟踪接收飞行器的下行遥测信号。首先,结合飞行器飞行轨道和地面布站情况,根据Friis传输方程对飞行器全飞行过程中的无线测控链路的电平值进行计算[13],得到矩阵H=[,,,tGαβ]。

式中 PR为地面接收机输入端的接收到的信号功率;λ为电磁波波长;R为天地收发天线之间的空间斜距;PT为飞行器遥测发射机的发射功率; GT为发射天线(测控天线)增益; GR为接收天线(地面站天线)增益;Lt为遥测发射机至测控天线之间的馈电损耗;Lpt为地面接收天线的指向误差损耗; LA为电磁波穿过大气层时引起的吸收损耗; LP为收发天线之间的电波极化不匹配引起的损耗; Lr为地面接收天线至接收机端口之间的馈电损耗; Sf为系统设计时预留的裕度。
然后,以(α,β)为变量,G为函数作图,如图4所示。由图4可以看出,函数G的图形是三维空间曲线,这也验证了前面的理论分析。
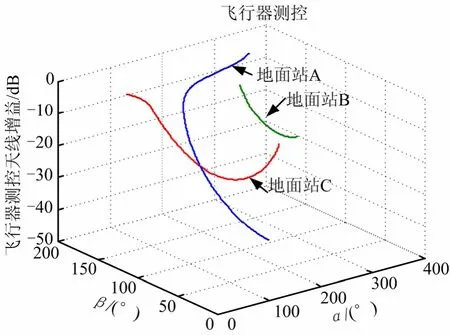
图4 飞行器测控天线增益曲线Fig.4 Curve of the TT&C Antenna Gain
以t为变量,G为函数作图,如图5所示。由图5可以看出,3个地面站可接力完成跟踪测控。在实际任务中,为兼顾地面站之间的搭接和对飞行器测控天线方向图的要求,两站交汇测控弧段均取一小段区间。为此,划定3个地面站的跟踪弧段分别为(28~265 s),(222~509 s)和(496~793 s)。
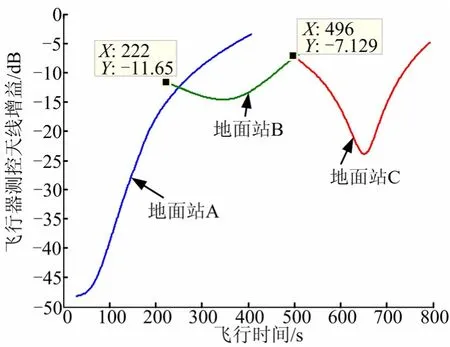
图5 地面站接力跟踪曲线Fig.5 Relay Tracking of the Ground Station
按照划定的各站跟踪弧段,从矩阵H中提取出子集H',矩阵H'即为增益曲线集{li},i = 1 ,2,3的矩阵表示形式,也是对测控天线方向图进行精细化分析的依据。
对增益曲线集{li}和二维方向图集{Pi}进行比较。首先,将测控天线安装于飞行器平台上后在各个象限角面内的二维方向图集{Pi},同样以二维矩阵的形式表示出来,记为矩阵P181×37。矩阵P的第1列为β角的值,等间隔从0°到180°,第2列到第37列为α从0°到350°每10°一个面内对应各个β角的天线增益值。然后,遍历矩阵H中所有的时间t列数据,对于某个ti对应的跟踪角度( αi, βi),先在矩阵P中逐列找到最接近的α角,再在相应的列找到最接近的β角,该点对应的增益值为 GP,并求出二者的差值∆G=GP-Gi,若∆G<0,则认为测控天线方向图中的该点增益值不满足要求,并将该点对应的元素单独挑出形成矩阵K,K=[tj, αj, βj, Gj]。矩阵K即为对飞行器测控天线方向图采用基于地面站跟踪的精细化分析方法而得出的结果。按上述方法编写Matlab程序[14],求解计算矩阵K。以矩阵K的时间列t为变量,分别以角度列(α,β)和增益列G为函数作图,见图6、图7。

图6 角度不满足情况Fig.6 Dis-satisfaction in Angle

图7 增益不满足情况Fig.7 Dis-satisfaction in Gain
由图6和图7可以看出,测控天线方向图在两站交汇跟踪的某些时刻或时间段内以及地面站C跟踪的最后弧段不满足测控链路电平值要求,且增益差值0.5~7 dB不等。
使用传统分析方法,将分区间的二维方向图{Qi}与{Pi}直接作比较,如图8至图10所示。图8至图10中,黑色折线为分区间的{Qi},其他曲线为相应区间内的{Pi}。

图8 α=90~170°面内方向图比较Fig.8 Comparison of the Radiation Pattern in α=90~170°
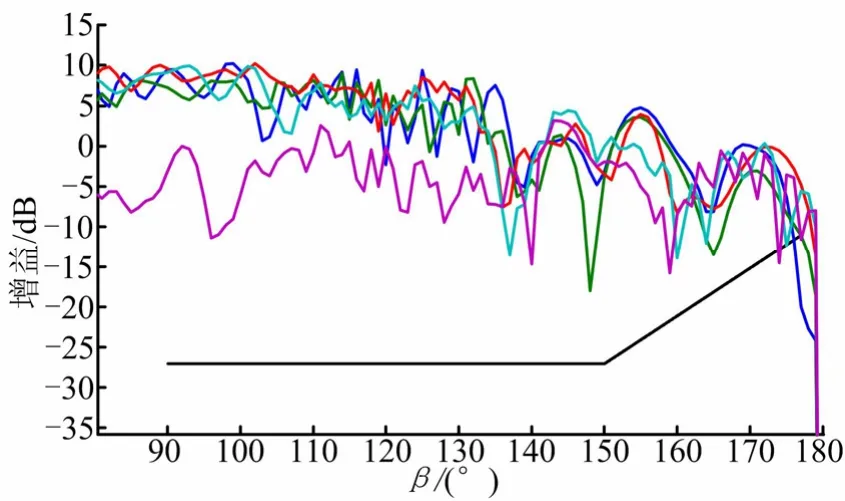
图9 α=200~240°面内方向图比较Fig.9 Comparison of the Radiation Pattern in α=200~240°
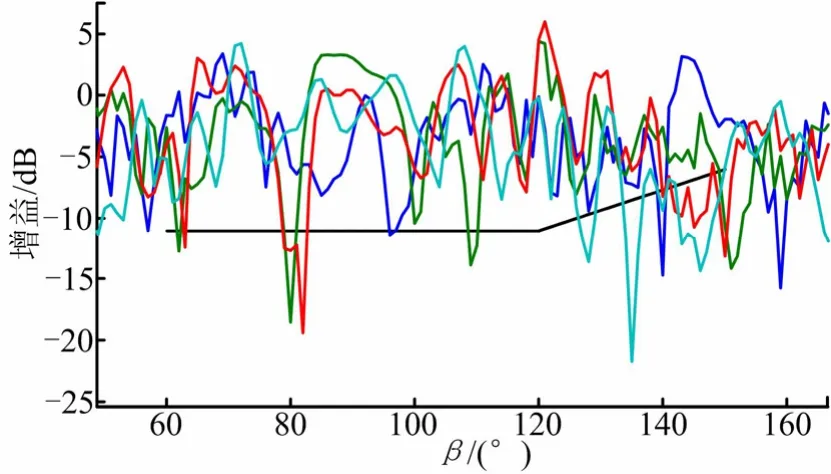
图10 α=240~270°面内方向图比较Fig.10 Comparison of the Radiation Pattern inα=240~270°
图8 至图10中,位于黑色折线以下的曲线部分为测控天线方向图中不满足的点对应的增益值及角度。可以看出,不满足点的角度明显多于精细化分析的结果。
为了直观起见,将两种方法的分析结果(测控天线方向图不满足角度)列表对比,详见表 1。由表 1可以看出,精细化方法的分析结果仅是传统方法分析结果的一个小子集,无论是涉及的α面还是β角区间,都少很多,即达到了精细化分析的目的。此外,由于矩阵K中保留了跟踪时间参数t,因此,对于测控天线方向图不满足的角度,可以进一步分析具体对应的跟踪弧段和天线增益差值情况,为地面站布站站址和天线安装角度的等系统设计因素提供参考。
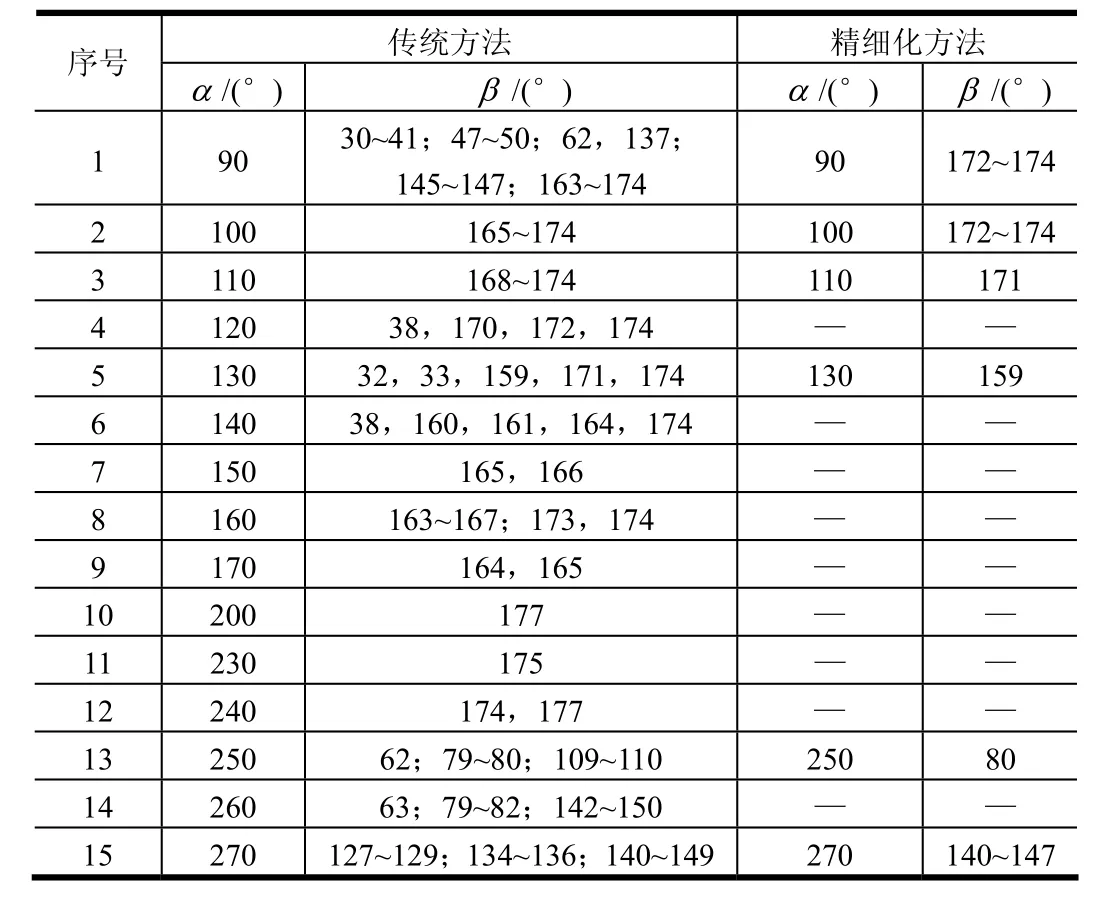
表1 两种方法分析结果对比Tab.1 Comparison of the Results in the Two Ways
3 结束语
本文针对飞行器测控天线方向图传统分析方法的不足,从测控天线实际工作过程的角度,提出了基于地面站跟踪的天线方向图分析方法,并通过理论分析和计算对比,验证了该方法的优越性,对工程应用有较好的指导作用。
猜你喜欢
振动与冲击(2022年19期)2022-10-17
心理学报(2022年10期)2022-10-12
航天标准化(2021年3期)2021-12-25
北京航空航天大学学报(2021年9期)2021-11-02
湖北大学学报(自然科学版)(2021年5期)2021-08-20
北京航空航天大学学报(2021年6期)2021-07-20
建材发展导向(2021年6期)2021-06-09
中国船检(2020年11期)2020-11-27
中国航海(2019年2期)2019-07-24
西江文艺(2017年15期)2017-09-10
