
基于STC15单片机的管道内钢珠运动测量装置设计与实现*
2018-12-24 07:36刘永锋
山西电子技术 2018年6期
刘永锋
(山西职业技术学院 电子信息工程系,山西 太原 030006)
1 系统介绍
1.1 系统分析
本系统采用新型接近开关传感器,将传感器安装在管壁外,可以在不接触钢球和不破坏管道的情况下,检测到管道内高速通过的小球,灵敏度极高,当传感器内有小球经过时,传感器产生低电平信号,经过LM358P电平转换,反馈给单片机IO口形成闭环控制系统,计算出所需信息,送给1602液晶显示,按键可以切换到所需任务,方便灵活,易于操作。
1.2 各模块方案选择与论证
1.2.1 主控芯片
方案一:STC89C51单片机价格低廉,技术成熟,但功耗较高,运行速度慢,单片机内集成资源少。
方案二:STC公司新款IAP15f2k61s2单片机,无需外接晶振,外围电路简单,运行速度快,硬件设计方便,资源丰富,可以满足本设计的要求[2]。
通过比较,综合考虑认为在满足功能要求的前提下使用IAP15f2k61s2单片机,运行速度较快,资源较多。故选择方案二。
1.2.2 传感器
方案一:金属传感器,可以感应管道内钢珠,但是当钢珠运动过快时,灵敏度降低,且价格昂贵。
方案二:采用新型环形接近开关传感器精度高,输出反应速度快,工作可靠,功耗低,操作频率高,体积小,安装调整方便。
本系统中传感器的选择极为重要,能否正确感知到钢珠的存在,关系到系统的成功与否,考虑到系统对传感器的灵敏度要求较高,故选用方案二。
经过以上论证,最终确定总体设计方案框图如图1所示。
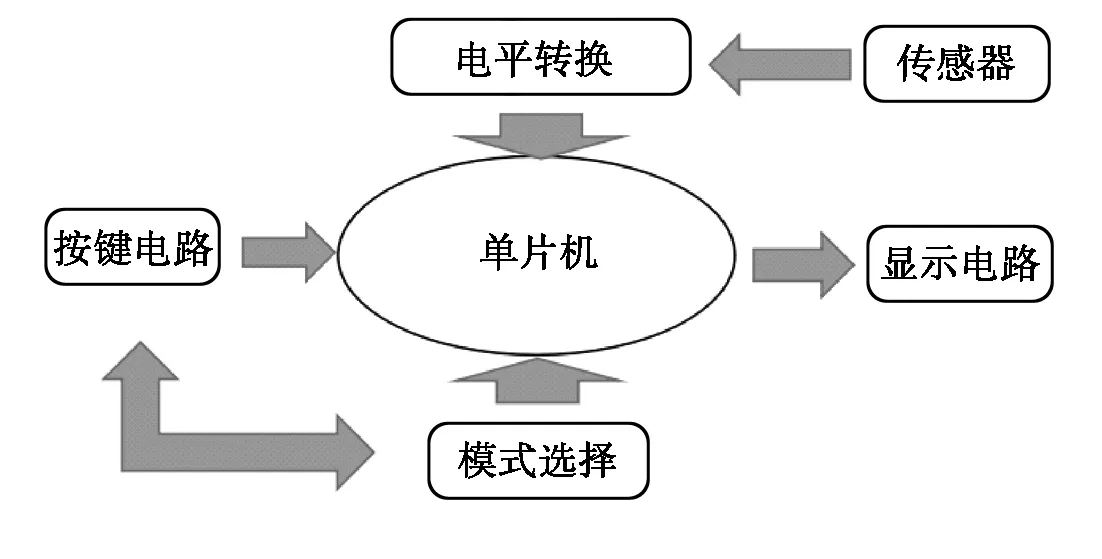
图1 系统总体方案框图
2 理论分析与计算
利用单片机外部中断检测环形接近开关产生的低电平脉冲信号,即可计算出管道内运动的小球的个数。系统中的两个环形接近开关产生信号的先后顺序可以判断出小球滚动的方向。测量小球经过两个传感器的次数来判断运动周期,计算角度是本题的难点,若采用数学公式计算,首先难度较大,另外会产生较大误差,并不能模拟真实小球运动。所以采用统计分析法,通过大量测试,将小球运动时间与管道倾斜角度相对应,这样,计算出小球在管道内的运动时间即可得到角度,且误差较小。
2.1 角度与钢球滚动时间关系
通过多次试验测量,得到管道角度与钢球滚动时间关系如图2所示。
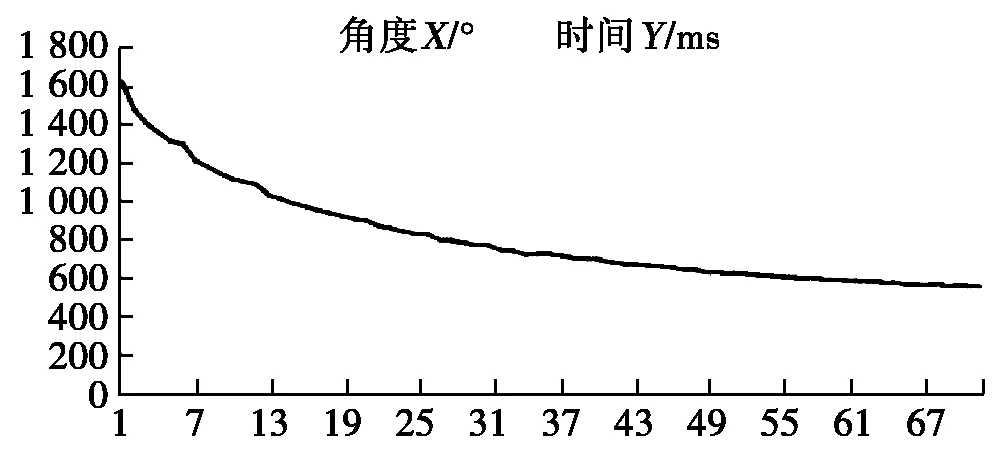
图2 角度与钢球滚动时间关系图
2.2 测试结果与分析(测量数据单位均为°)

表1 传感器间距为任意距离测得角度数据

表2 传感器间距为20cm测得角度数据
在测试中,取边界值来测试,以测量系统的稳定性与误差,经过测量,由于机械结构很稳定,所以由机械部分造成的误差几乎没有,可以发现随着角度的上升,误差逐渐增大,误差角度保持在≤3°满足题目要求。
3 软件与部分硬件设计
3.1 系统软件设计流程图
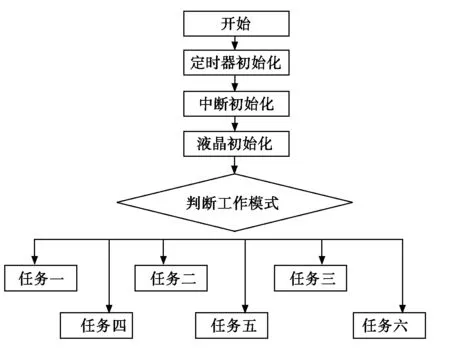
图3 系统软件流程图
3.2 电平转换电路
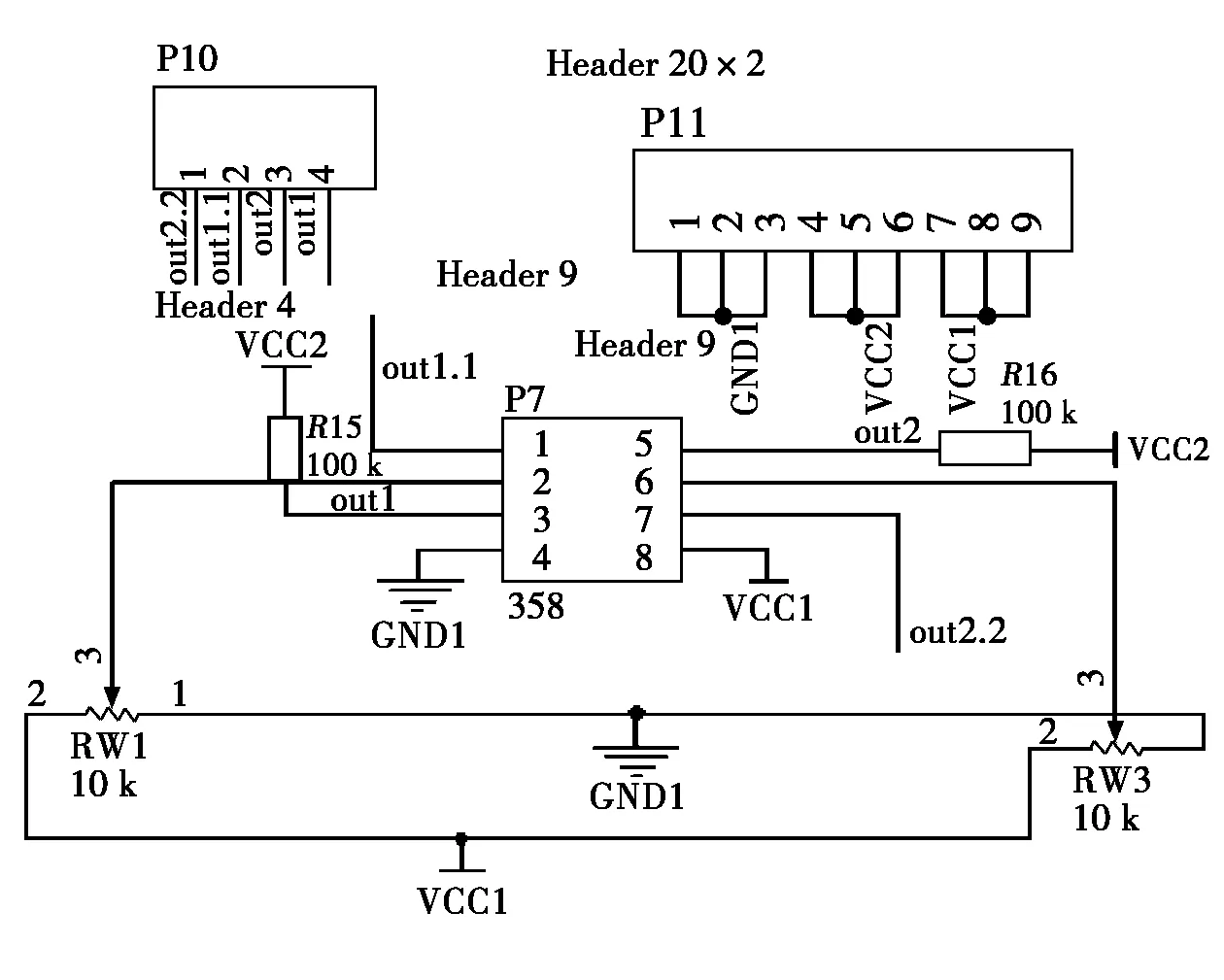
图4 传感器电平转换原理图
如图4所示,由于传感器是由12 V供电,所以它的反馈端输出的电压也是12 V左右,为了方便给单片机反馈数据,所以设计这部分电压比较电路。具体的原理:通过把传感器的反馈端输出的电压接到比较器的(OUT1)同相输入端,然后在反向输入端设定一个基准电压,使得输出端OUT1.1输出一个低于5 V的电压给单片机[3]。最后通过单片机处理反馈的数据来作出相应的指令。
4 结论
我们设计的管道内钢珠运动测量装置以IAP15F2K60S2为系统核心,使用环形接近开关传感器,来感应到管道内高速运动的小球,并通过系统分析方法,根据小球运动的速度,计算得到管道相应的角度,测量误差范围控制在3°以内,满足系统要求。本系统来源于全国大学生电子设计竞赛,参赛作品荣获国家二等奖。
猜你喜欢
机床与液压(2022年10期)2022-09-20
中学生数理化(高中版.高考理化)(2020年11期)2020-12-14
动漫界·幼教365(中班)(2020年8期)2020-06-29
家教世界·创新阅读(2020年4期)2020-06-03
家教世界(2020年10期)2020-06-01
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
发明与创新·中学生(2018年7期)2018-09-17
