
车载多级丝杠升降系统的设计
2018-12-24 07:36范峰岩
山西电子技术 2018年6期
范峰岩
(山西大众电子信息产业集团,山西 太原 030024)
升降平台作为车载系统的一个重要组成单元,本文主要介绍用于承载光电侦察系统及其配备火控系统的一种车载升降平台,该升降平台采用多级伸缩螺纹副的传动方式,举升速度快,运行平稳可靠。实现设备运载时隐藏在车内,工作时升高至指定位置的技术要求。控制系统选用基于电机控制的DSC芯片,被控对象为交流永磁同步电机,结合专门设计的控制算法,可以达到快速、准确进行平台升降及定位的目的[1]。
设计该升降平台的目的是将车载光电侦察系统升降到指定位置。由于该升降平台需要在车内使用,而车底盘的承载能力有限,空间有限,在使用的过程中绝不能超出安全承载量,所以在设计中要严格控制重量、体积,以及选择合理的结构和简单易行的控制操作[4]。
1 升降平台组成和工作原理
车载升降平台主要由传动系统、驱动系统、导向机构、底座、安装台面以及限位保护装置等组成。传动系统需要实现工作平台上升和下降的功能,驱动系统需要实现对升降平台的驱动,安装台面需要达到升降平台的刚性指标要求,导向机构能够保证平台工作方向的稳定性,而测量限位保护装置则需要实现升降平台的自动制动功能[2]。
因此,结合车载光电侦察火控系统负载重量较大、升降高度不高、车内安装空间较小的特点,升降平台的升降结构形式选用多级丝杠联动形式。
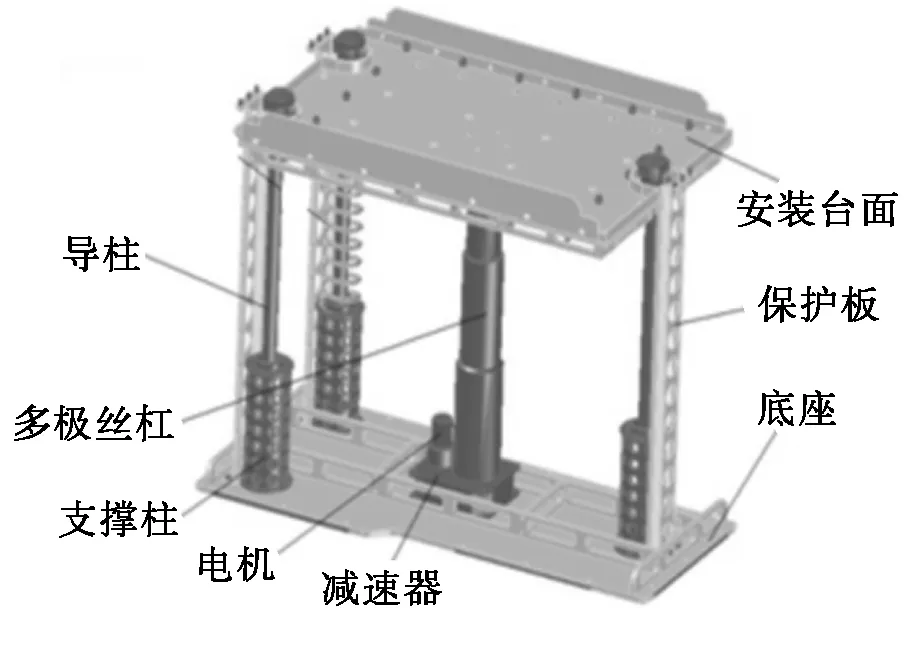
图1 升降平台结构形式(升起状态)
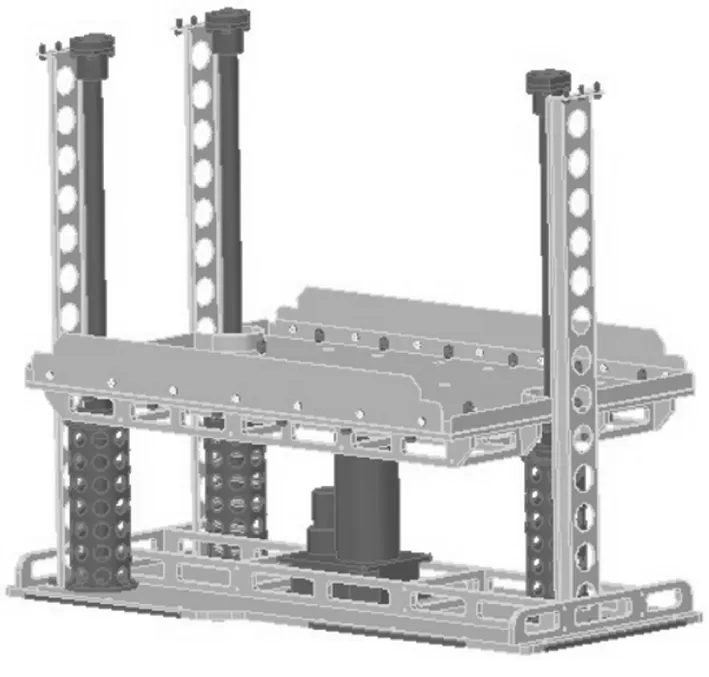
图2 升降平台结构形式(回收状态)
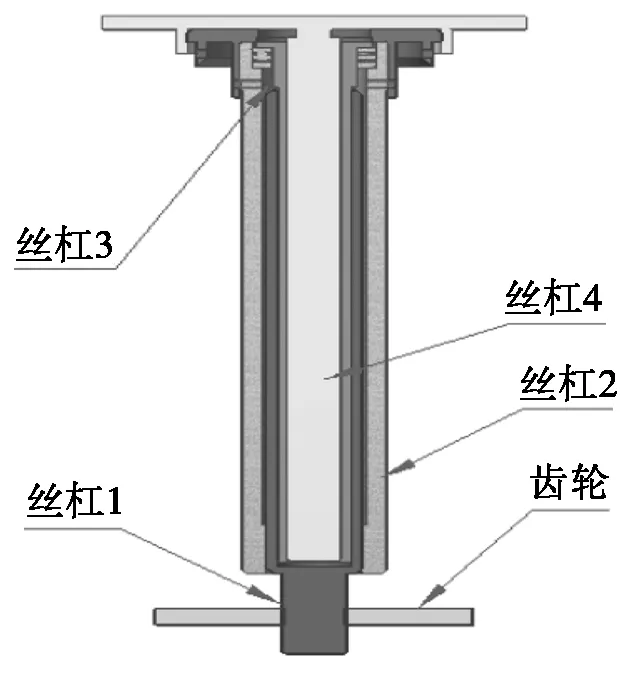
图3 多级丝杠结构
1.1 传动系统
本文所设计的平台结构,如图1,图3所示,其中安装台面可以看作为升降平台的承载台面,承载设备上升和下降。底座与车厢地板紧固,多级丝杠升降机、电机、减速器、导向柱、控制箱都安装在底座上。丝杠1下端为轴,上端为中空有卯型结构的外螺纹丝杠,下端安装圆锥滚子轴承和推力轴承与齿轮。丝杠2是中空内螺纹,与丝杠1组成第一级螺纹副,丝杠2上端安装一个推力球轴承。丝杠3是中空内螺纹,外圆为榫型结构,安装在丝杠1的孔内,与丝杠1为卯榫型面配合,通过上端的外凸台安装在推力球轴承上面。丝杠4是外螺纹,与丝杠3组成第二级螺纹副,上端通过法兰与安装台面连接,推动安装台面沿着导向轴上升和下降。3根导向轴外圆表面粗糙度至少达到0.8,下端安装在底座上,上端安装在车顶的合适位置,通过直线轴承与安装台面连接。电机和减速器安装在底座上,带动齿轮做圆周运动。
平台上升时,电机和减速器带动齿轮做圆周运动,传递扭矩;齿轮通过键连接带动丝杠1同时旋转;丝杠2做直线运动,顺着丝杠1向上升起,丝杠3既做直线运动,也做旋转运动,随着丝杠2同步上升,同时由于安装在丝杠1的卯型孔内,利用卯榫型面随着丝杠1做圆周运动;丝杠4做直线运动,推动安装台面沿着导向轴上升。当其上升到上限位开关之后,电控系统会切断电机电源,从而完成上升过程。
下降过程,电机反转,原理同上升过程相同,丝杆同步下降收缩,当下降并且压住下限位行程开关之后,电控系统则会切断电机的电源,使其停止。从而完成下降的过程。
上述的方法和结构,所有的螺纹螺距都一样,平台在升降过程中,其位置能够精确控制,即使在外部损坏的情况下,由于丝杠螺纹本身的自锁性,也能保证其使用安全可靠。多级丝杠要尽量安装在承载物的质心点上,确保上升时台面不会晃动。多级丝杠机构大大的降低了其安装所需的空间,适合狭小的车内空间使用。
1.2 导向机构
由于该升降平台仅采用一根多级丝杠向上举升,为了保证平台的平衡,在安装台面和车顶之间共安装3组直线导轨(如图1)。直线导轨具有定位精度高、磨损小、可高速运行、能承受多方向载荷、安装互换容易等特点,是升降平台理想的导向机构。实际使用时,光轴两端分别固定在安装台面和车顶的合适位置,三根光轴安装时要保证垂直度和平行度,直线轴承则安装在相对运动的安装台面上,涂抹低温润滑脂,保证安装台面能够顺畅的运动[2,3]。
1.3 限位保护机构
为防止升降超出允许范围,造成设备和人身损失,应对升降平台采取限位措施,这类措施一般包括软件限位、电气限位和机械限位[1]。软件限位在升降运动即将到达临界位置时提前对平台进行减速。电气限位通常采用行程开关,当软件限位失效,平台即会触动行程开关,电机被强制断电停机。机械限位通常为带缓冲装置的金属块,位于电气限位装置后,是限制平台运动的最后关卡。
2 升降平台控制驱动方案
2.1 概述
控制器是整个升降平台的核心控制部分,兼具信号采集、控制和驱动的功能。控制器由升降控制盒、状态传感器组成。控制器根据上位机指令,驱动电机旋转,带动升降装置升降。状态传感器包括上、下限位开关等,用于采集各位置的状态量并上报给控制器。
2.2 驱动原理
升降平台的驱动主要由变频器和异步交流电动机组成。电动机的速度通过变频器变压变频调速系统调节,以实现速度的连续变化;而电动机的运行方向是利用外部信号来控制变频器进行换相,以实现电动机的方向控制[2]。其驱动原理如图4所示。

图4 升降平台驱动原理图
给定的速度与经由PLC高速计数模块反馈回来的实际速度相减产生速度误差,经PLC运算可以得到控制量,再由RS-485接口输出到变频器以驱动电动机,从而达到调节电动机转速的目的[1,3]。由于PLC与变频器之间没有采用D/A进行转换,而是采用了RS-485进行数字通信,有效地提高了系统的抗干扰能力。测速装置采用编码器克服了过去调速系统中采用测速发电机输出特性存在死区和非线性区,体积大,误差大等缺点。对于工作平台升降极限位置的限制则是采用霍尔传感器和行程开关实现双重保护[2]。当工作平台进行升降动作到达相应的位置时,传感器检测到磁钢,同时将信号传入PLC,从而引起升降异步电动机线路中的变频器作用,起到控制电动机的作用,实现对工作平台升降动作的控制。为了防止升降的速度过快冲出极限位置或者系统发生故障不受控制,在升降的上下极限位置安装行程开关。通过触碰安装在相应位置上的行程开关,继电器失电,触点发生相应动作,驱动系统断电,从而实现了双保护[4]。
3 电机选型
3.1 电机转速计算
要实现升/降运动时间不超过15 s,有效行程为700 mm,因此,运动平均速度为:
丝杠导程为10 mm,因此,丝杠平均转速为:
选择减速器减速比为10∶1,所以电机转速约为:
ω=280×10=2 800 rpm .
3.2 丝杠扭矩计算
普通丝杠扭矩计算公式如下式所示:
其中:Fa为轴向负载,Fa=mg(sinα+μcosα),μ为导向件之间的综合摩擦系数,L为导程,η为传动机构的效率,其中丝杠效率为20%,α为传动机构的倾斜角[6]。
设m=400 kg,垂直举升时α=90°
则:Fa=mg=400×9.8=3920 N.

由于减速器减速比为10∶1,η为齿轮两级减速的效率,约为0.81,则电机端的扭矩为:
3.3 电机功率计算
电机平均功率:
其中:η1是丝杠的传动效率,为20%;η2、η3分别是二级齿轮减速机构的传动效率,均为90%;S是驱动电机功率裕量,取50%,即1.5[5]。
综上计算,得出电机的主要参数指标,结合工作的环境要求,可以选择符合技术要求的电机。
4 结语
车载升降平台已经广泛的用于承载光电侦察系统及火控系统,实现运载时隐藏在车内,工作时升高到车顶预定位置;有效地提高了装备系统的机动性、灵活性和隐蔽性,从而提高装备的战场生存能力。
猜你喜欢
环球市场(2021年11期)2021-01-15
新商务周刊(2019年24期)2019-12-22
制造技术与机床(2019年11期)2019-12-04
制造技术与机床(2019年1期)2019-01-14
意林·作文素材(2018年11期)2018-07-19
数码世界(2018年6期)2018-07-12
制造技术与机床(2017年8期)2017-11-27
中国交通信息化(2016年7期)2016-06-06
通信电源技术(2016年1期)2016-04-16
工业设计(2016年8期)2016-04-16
