波尔共振实验中相位差测量的改进
2018-12-22 07:19:52马明哲赵俊浩邓扬扬王爱芳
物理实验 2018年12期
马明哲,刘 芬,赵俊浩,邓扬扬,王爱芳
(山东大学(威海) 空间科学与物理学院,山东 威海 264209)
振动是物质世界中广泛存在的物理现象.受迫振动是在周期性驱动力作用下所引起的振动,当驱动力频率与物体固有频率接近,受迫振动的振幅最大,称为共振.共振现象大量存在于科学研究、生活生产和自然活动中,如利用核磁共振和顺磁共振研究物质的结构等[1].
1 实验原理
1.1 共振现象基本量之间的关系
物体做自由振动时,其位移随时间按正弦规律变化,称为简谐振动.简谐振动的振幅及初相位与振动的初始条件有关,振动的周期或频率与初始条件无关,而与系统的固有特性有关,称为固有频率或者固有周期.当从外界给物体加上周期性外力(称为策动力)时,如果策动力的频率与该物体的固有频率相同,物体振动的振幅达到最大,这种现象叫做共振[2].
ZKY-BG波尔共振实验仪(如图1所示),在弹性力矩和电磁阻尼力矩作用下,摆轮分别作自由摆动和受迫振动,以此来研究受迫振动特性.
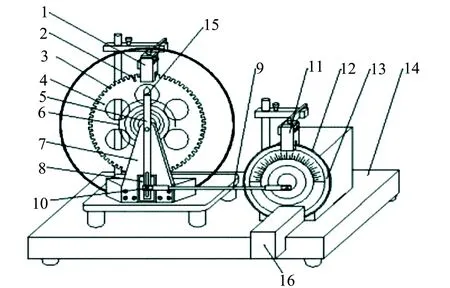
1.光电门1 2.长凹槽 3.短凹槽 4.铜质摆轮 5.摆杆 6.蜗卷弹簧 7.支撑架 8.阻尼线圈 9.连杆 10.摇杆调节螺丝 11.光电门2 12.角度盘 13.有机玻璃转盘 14.底座 15.弹簧夹持螺钉 16.闪光灯
当摆轮受到周期性外力矩M=M0·cos (ωt)的作用,并在有空气阻尼和电磁阻尼的媒质中运动时,其运动方程为
(1)
则式(1)变为
(2)
当mcos (ωt)=0时,式(2)即为阻尼振动方程.当β=0,即在无阻尼情况时,式(2)变为简谐振动方程,系统的固有频率为ω0.方程(2)的通解为
θ=θ1e-β tcos (ω0t+α)+θ2cos (ωt+φ0),
(3)
由式(3)可见,受迫振动可分成2部分:第一项,θ1e-β tcos (ω0t+α)和初始条件有关,经过一定时间后衰减消失.第二项,说明外力矩对摆轮作功,向振动体传送能量,最后达到稳定的振动状态,振幅为
(4)
它与外力矩之间的相位差的正切值为
(5)
由式(4)和式(5)可以看出,振幅θ2与相位差φ的数值取决于外力矩m、频率ω、系统的固有频率ω0和阻尼系数β,而与振动初始状态无关.

(6)
(7)
式(6)~(7)表明,阻尼系数β越小,共振时圆频率越接近于系统固有频率,振幅θr也越大,如图2幅频特性所示.从图2中还可以发现阻尼不同,共振时的共振频率并不相同,只有在自由振动时其共振频率才等于固有频率.

图2 幅频特性
为了更方便直观地观察不同阻尼受迫振动的幅频特性、相频特性,横坐标用ω/ωr表示,则不同阻尼的共振点都在ω/ωr=1处,即图3,图4表示在不同β时,受迫振动的幅频特性、相频特性.相频特性指的是摆轮振动的相位和策动力的相位之差与其振动频率的关系[3].
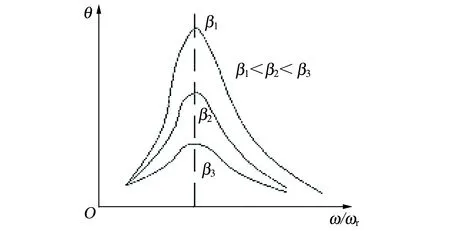
图3 幅频特性

图4 相频特性
1.2 仪器原理
ZKY-BG型波尔共振仪由与蜗卷弹簧相连的摆轮和与电机相连的有机玻璃转盘组成,其中摆轮为本次实验的主体和测量对象.电器控制箱能控制电机频率,记录摆轮振幅、频率、电机的频率,并可以通过摆轮下方的电磁铁改变对摆轮的磁阻尼.图1中光电门1测量摆轮的周期和振幅,光电门2测有机玻璃转盘的周期.
2 问题与分析
多次实验和分析发现实验存在以下问题:
2.1 读数误差大
相位差的测量是1号光电门在摆轮零相位时触发闪光灯闪光,依赖闪光后产生的短暂视觉滞留观察有机玻璃转盘的上荧光线对应的相位φ,可得策动力与摆轮振幅的相位差为φ[4].读数需要实验者在不足1 s的滞留时间内完成读数,且滞留现象不明显,不易于捕捉,难以准确读出数值.标志线的视觉滞留,对实验室的光环境有较高要求,若周围环境光照强度太大,则有机玻璃盘上的亮线被掩盖,不易观察到;若环境光强太弱,则无法看清玻璃转盘后的角度盘的数据和刻度;且闪光灯发出的强光可能对实验者产生较大刺激.综合以上多种因素产生的误差大于刻度盘的最小分度[5].
2.2 实验操作不便捷、实验过程不舒适
本实验需要实验者长期暴露在不断闪烁的强光源下进行,由于视觉滞留不明显,在正常读数前还要判断系统是否稳定,为了尽量准确地读出示数,每次相位差读数,需要闪光灯闪烁10次左右.实验室内多组操作,相互间光相互影响.这样光环境的实验操作和冗长的实验过程,不单对实验者的身心造成伤害,另外也会因为长期视觉疲劳而降低读数的准确性.
3 仪器改进方案与实施
用光电门测量相位差.舍弃频闪法,改进的实验仪器将闪光灯去除,加入光电门,借助光电门的特性来测量相位差,用单片机实现数据的读取和处理[6].


图5 自制的边缘带小齿的转盘


图6 改进后的仪器

图7 单片机控制中心

图8 算法流程图
4 仪器制作
在实践的过程中,分为3个任务模块,齿轮的定制、光电门的读数与程序设计、原闪光灯信号的转换与接入,并逐一实现完成.
为吻合原有仪器设计的需要,设计内径为5.0 cm、外径为9.0 cm、厚度为0.2 cm、可用螺丝安装固定的120齿的齿圈.使用AutoCAD或Solidworks软件绘制工图,通过采用3D打印技术,使用有机高分子材料制作.设计图如图5所示,成品如图6中右侧米色的齿状转盘.
采用MCU C语言进行程序的编写.基础程序为:每接收到1次信号(即光电门处经过1个齿),将数据累加3°(依据齿轮规格确定,暂定120齿),当达到357°时返回预设值0°,并开始下组循环.微小振动造成的计数误差,采用延迟函数进行消除.硬件方面,使用单片机、液晶显示屏等,并进行简单的电路设计.将光电门作为传感器,安装于合适位置,将仪器调整至初始位置后,即可按照操作流程进行实验,并从显示屏上读取示数[8].
去除原仪器上的闪光灯后,在信号的传输上,并无较大变动.即将原电信号进行变压(所采用51单片机的额定输入高电平为5 V;经万用表粗测,原仪器所采用GZ光电传感器输出信号约为11 V),仍以电信号的形式输入新的电路,使得显示屏可以在读数的时间点上显示并记录有关数据.
5 结束语
针对现有波尔共振仪存在的不足设计了数据采集系统,通过增加齿轮型的有机玻璃转盘,结合光电门即可替代原有实验者通过肉眼记录数据,所增加的实验数据显示屏也方便实验者记录数据,提高了实验效率,同时消除了频闪法对其他实验小组的影响,改善了实验环境.通过本次对波尔共振仪的改进,有助于学生更直观且更准确地观察和理解共振现象.
猜你喜欢
传感器与微系统(2022年4期)2022-04-12 08:37:44
物流技术与应用(2021年7期)2021-08-11 02:44:14
妈妈宝宝(2019年10期)2019-10-26 02:45:34
科学与技术(2019年5期)2019-04-23 06:49:52
装备制造技术(2019年1期)2019-04-22 07:29:22
物理教学探讨(2018年10期)2018-12-27 11:18:12
电子测试(2018年15期)2018-09-26 06:01:10
电子制作(2017年2期)2017-05-17 03:54:48
学生天地(2016年35期)2016-04-16 05:16:44
燕山大学学报(2014年4期)2014-03-11 15:28:54