
飞行时间测距电路设计
2018-12-20 07:54胡美璜陈洪雷丁瑞军
电子设计工程 2018年24期
胡美璜 ,陈洪雷 ,丁瑞军
(1.中国科学院上海技术物理研究所中国科学院红外成像材料与器件重点实验室,上海200083;2.中国科学院大学北京100049;3.上海科技大学上海200120)
主动探测技术在二维成像的基础上能够提供目标的三维信息,提高对目标的辨析能力。雪崩二极管(APD)是一种具有高增益,高带宽的光电探测器。这些优点使APD适合于远距离的高精度成像系统。
基于APD的深度信息探测系统在多个重要领域有重要应用。在航空遥感领域,美国国家航天局和DRS公司合作的4×4像元碲镉汞雪崩二极管在探测二氧化碳和甲烷探测取得了成功[1];麻省理工学院林肯国家实验室利用硅材料实现了64×64像元工作在盖革模式下的雪崩二极管阵面,并且应用在航空遥感上,每小时能够获得400 km2精度为25 cm的图像[2]。在空间科学领域,法国CEA-LET等机构用碲镉汞材料雪崩二极管实现了的320×256像元的,像元大小30 μm,工作温度50 K超长波的大气探测器[3]。意大利学者实现了阵列规模达到64×64像元,量程在300~6 000米的,精度自0.2~0.5米的低功耗应用于航天器导航和着陆系统的深度成像系统[4]。天津大学的研究团队实现了200 ps精度,18位的低功耗计时系统[5]。在汽车自动驾驶领域意大利科研机构用CMOS探测器实现了64×32像元,像元尺寸150 μm阵面;探测精度在0.6 m,探测量程在40米的应用于自动驾驶的深度感知系统[6]。日本丰田公司的研究人员用256×64像元APD面阵配合MEMS扫描镜在20 m量程下实现15cm精度的深度信息探测[9]。在生物和医学检测领域哥伦比亚大学和英特尔公司的科学家用130 nm CMOS工艺实现了62.5 ps精度和65 ns量程的高精度生物成像系统[10]。以上反映了基于APD的主动探测技术在未来有巨大的潜力,如何提高探测系统的精度和范围是十分重要的问题。
文中基于时间飞行法,针对主动探测的精度和范围问题,提出了与回波信号无关的恒定比例时间鉴别电路,采用新型时间数据转换器取得了高精度,宽量程时间计数。
1 时间飞行法的深度信息获取原理
主动测距法主要包括飞行时间法、相位法、干涉法和三角法等[7]。飞行时间测量包括直接测量和间接测量。直接测量又包括时间相关光子计数法和直接测量两种方法[6]。间接测量方法包括连续波形测量和脉冲波形测量[8]。时间相关光子测量精度高,但是效率低,并且难以实现,不适合应用在高速成像系统里。时间飞行测距是单次测距精度最高的一种深度信息获取方式。时间飞行测距的距离计算式(1):

c是光速,Δt是激光发射和APD接收到回波信号的时间差。高精度时间鉴别是时间飞行法获得深度信息的关键技术。为了获得高精度的时间差,国内外多个研究机构对此问题展开了研究。针对时间差的直接测量[11]和间接测量均有深入的研究。基于直接的飞行时间测距原理,设计了基于碲镉汞雪崩增益二极管深度信息获取系统,如图1所示。
2 系统电路设计
2.1 APD偏置电源电路

图1 系统结构图
碲镉汞APD器件相比较其他APD器件而言需要的偏置电压要低,但是仍然需要15 V的偏置电压才能有较大的增益。碲镉汞APD器件是高敏感的探测器需要提供十分稳定的偏置电压源。基于上述要求设计了以LM64010芯片为核心的具有高稳定性的偏置电压源,如图2所示。偏置电源的输出电压如式(2):

电源芯片能够使VFB在输入电压抖动的情况下稳定在1.23 V。能够稳定的输出15 V的偏置电压。

图2 偏置电源
2.2 APD前置放大电路
APD接收激光脉冲的回波信号将激光信号转化为电流信号。APD的电流与回波信号功率成线性比例。激光的回波信号能量与距离的关系如式(3)所示。

式中Pr表示APD接收到的功率,Pt激光器发射的功率,ρ目标的反射系数,D距离,α激光在大气中的衰减系数,Ar接收光学孔径面积。从式中可以发现当两个目标距离有较大差别时回波信号的能量有较大区别,APD的响应电流也会有较大区别。利用跨阻放大器将APD产生的电流信号转化为电压信号。跨阻放大器的增益如式(4)所示:

跨阻放大器的信噪比[12]:

式中in是负端输入电流点噪声,en为正端输入电压点噪声。放大器的-3 dB带宽f如式(6):

GBW是放大器的增益带宽积,Cint是输入端电容。由此可以看出信噪比和带宽之间是相互制衡的,如果要提高信噪比就要提高RF,提高信噪比会导致带宽下降。并且RF如果较大在回波信号较强的情况下会造成放大器的饱和失真。为了接收电路能够适应不同距离的回波信号,西南技术物理研究所的研究人员提出了多种增益放大技术[13],但是西南技术物理所设计的可变增益跨阻放大器的电路,是通过使用多个不同跨阻来实现的,不具备自适应功能。南京理工大学的研究人员采用了限幅的方法来保证电路正常工作,动态范围被限定住了[14]。文中设计的自动增益控制电路能够根据输入信号的幅值自动调节增益以使输出信号稳定,可以应用于复杂环境的三维成像,有利于三维成像系统拓展到遥感等复杂成像领域。
如图3所示的自动增益功能的跨阻放大器。包括跨阻放大和自动增益两个部分。APD产生的电流信号经过跨阻放大转化成电压信号。跨阻放大过的电压信号输入到可变增益放大器VCA821的输入端,OPA847为了增加放大器的驱动能力,OPA820单位增益放大器和二极管作为电压检测单元用于保持输出电压稳定。VCA821具有高带宽和0~42 dB自动调制增益,适用于APD接收模拟端。
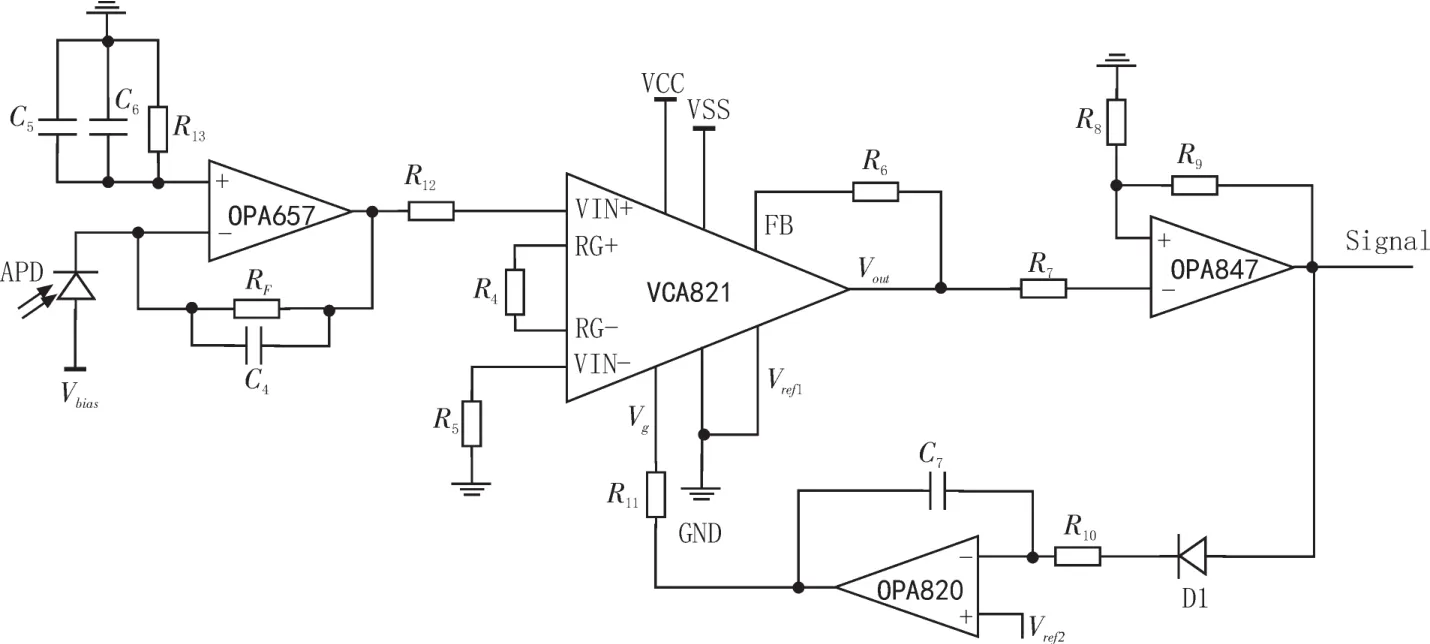
图3 自动增益跨阻放大器
2.3 时间鉴别电路
时刻鉴别电路是检测回波信号是否到达的关键单元,它根据回波信号的幅度来确定回波信号是否到来。激光的回波信号近似高斯模型[15]。

其中e式外界干扰,Am回波信号的幅度,Np回波信号数,σm标准差。固定阈值时刻鉴别引起的时间漂移误差如式(8)所示。由于不同距离的回波信号能量不同。假设最大和最小回波的能量对应的输出信号电压比为β。由于回波信号的差别造成的时漂移误差为:

Δt=T2-T1是不同回波信号引起的误差。
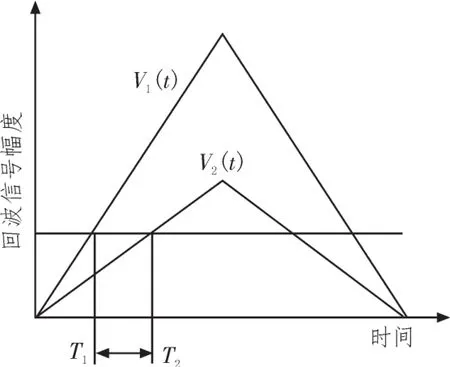
图4 回波信号能量差引起的时刻漂移
时刻鉴别的精度和稳定性对整体电路的性能影响重大。为了提高三维成像的精度,减小时刻鉴别带来的漂移误差是十分必要的。本文设计了与回波信号强度无关的恒定比例时刻鉴别电路。利用两个比较器来实现恒定比例时刻鉴别,比较器的A通道作为固定阈值比较,确保探测电路接收到回波信号;比较器B通道是一个恒比时刻鉴别电路,正端为衰减k倍的信号,负端为经过td延迟信号。
经过压缩的信号y3(t)如式(9),经过延时的信号y4(t)如式(10)所示,鉴别信号的时刻tp如式(11)所示。时刻鉴别点tp与回波信号的幅度无关,可以将可变延时误差转变为固定延时。

如图5所示的恒定比例时刻鉴别电路可以消除时间漂移误差。恒定比例时刻鉴别电路由TLV3502和74与门构成。TLV3502是一款高速,低功耗双通道比较器。有利于系统的小型化和低功耗设计,并且能够保证回波信号的高精度响应。

图5 恒定比例时刻鉴别电路
2.4 高精度计时单元
2.4.1 时间数据转换器单元
时间数据转换器(TDC)能够将时间信号转化为数字信号,是深度信息获取的关键元件。TDC的发展经历了3个阶段:1)纯模拟阶段,分为时间电压转换和模拟数字转换两部实现;2)全数字阶段,将时间信号直接转化为数字信号输出,主要有基于计数器和延迟链两种技术,分辨率受门延迟限制。3)小于门延时精度的TDC,主要思想是用两个延迟的差进行测量,可以取得低于门延迟的测量精度[16]。文中选用德州仪器最新设计的高精度,宽量程时间数据转换器TDC7200。TDC7200是一种粗细结合的高精度,宽量程的时间数据转换器。TDC7200内置自校准时基,可对时间和温度偏差进行补偿,这使得该时间数据转换器在外部16 MHz时钟下能够取得20 ps的精度。TDC7200具有两种工作模式,测量范围分别为 12~500 ns和 250 ns~8 ms可以切换,可以针对不同环境需要进行调节。该TDC有较低的功耗,适合探测器的小型化和低功耗的需求。TDC7200由MSP430控制,电路原理图如图6所示。

图6 时间转换器
2.4.2 TDC7200的控制模块
TDC7200的控制过程,系统上电后完成MSP430的初始化,待完成MSP430初始化后,再完成TDC7200的初始化。完成TDC7200的初始化后,MSP430向TDC7200发送选择测量模式的指令,待确定了测量模式后,MSP430向TDC7200发送计时开始的指令,TDC7200在start信号到来之时开始计时,在接收到探测器反馈回来的信号触发stop信号,时间数据转换器完成计时。计算与显示即使结果。刷新等待下一次的测量。

图7 TDC的控制流程图
3 测试与实验结果分析
3.1 测试结果
为了测试电路的性能,搭建了相应的测试平台。测试电源用的是安捷伦E3633A电源,示波器是Tektronix DPO 7354C,函数信号发生器是NI PXIe-1078。首先测试了时间数据转换器的性能,用函数信号发生器在4 MHz情况下,发送不同延迟的开始和结束信号;模拟探测器测试了整个系统的性能,如表1所示。实验结果表明TDC的量程能够达到200 μs对应的量程达到30 km,TDC的最小量程在10 ns,对应的空间距离是1.5 m,设计的电路完全可以满足遥 感的需求。

表1 多种情况测距实验结果
3.2 放大器信号抖动带来的误差

3.3 TDC的时间抖动误差
TDC7200是分为粗细两个阶段测量时间的。计数器的误差来源于粗细两次测量过程。时间数据转换器的误差为σTDC,如式(13)所示。

TDC7200的外部粗测量时钟为1~16 MHz。在8 MHz的外部时钟下,细测量的时钟抖动标准差为35 ps。TDC7200细测量的时钟抖动具有累计效应。由粗测量的时钟漂移引起的误差σtc和由细计数引起的误差σtf分别如下:

TDC7200在8 Mz的外部频率,量程为200 ns的的情况下测时误差为37 ps。表一的1到6栏说明随着量程的扩大,随时钟的数增多的累积误差在增大。第7到9栏表明,恒定比例时刻鉴别能够减小固定时刻鉴别带来的时刻漂移误差。实验数据表明本文的设计在深度探测上具备高量程和高精度的特点,实验实现了计划的目的。
4 结 论
文中在系统研读了前人的工作基础上,针对高精度、宽量程深度获取原理的研究,提出了相应的信号出路电路。完成了相应的电路设计,并且对电路进行了测试。取得了相应的测试结果,并且分析了主要的误差来源。通过此实验验证了不同回波强度下,电路依然有很高的精度和量程。说明基于APD的深度探测系统在获得非合作目标的深度信息上具有高量程、高精度和稳定性好的特点,即设计的自动增益控制电路,时刻鉴别电路和时间数据转换器适合用在远距离高精度深度信息获取上。
猜你喜欢
环球人物(2022年4期)2022-02-22
军民两用技术与产品(2021年7期)2021-10-13
小资CHIC!ELEGANCE(2021年32期)2021-09-18
煤气与热力(2021年4期)2021-06-09
石油化工自动化(2018年5期)2018-11-14
北京航空航天大学学报(2017年9期)2017-12-18
光学精密工程(2016年3期)2016-11-07
测绘科学与工程(2016年6期)2016-04-17
通信电源技术(2016年1期)2016-04-16
山东冶金(2015年5期)2015-12-10
