
空中骨干网覆盖策略
2018-12-19 06:58郑博张衡阳李勇程伟
通信学报 2018年11期
郑博,张衡阳,李勇,程伟
空中骨干网覆盖策略
郑博1,2,张衡阳1,李勇2,程伟2
(1. 空军工程大学信息与导航学院,陕西 西安 710077;2. 西北工业大学电子信息学院,陕西 西安 710129)
将采用定向天线的高空长航时无人机(HALE-UAV, high-altitude long-durance unmanned aerial vehicle)和长方体形状的空中走廊作为研究对象,覆盖策略的基本思想是提取运动球顶椎体的不变覆盖区域——圆柱体,作为基本覆盖单元填充空中走廊;总体目标是在满足圆柱体的高大于空中走廊高度的条件下,使用尽可能少的HALE-UAV。采用几何方法分析了HALE-UAV两种典型的运动轨道——圆形和三角形轨道,得到了圆柱体底面半径和高的数学表达式。通过最优化理论比较两种覆盖策略,得到了最优覆盖方案。研究结果表明,圆形轨道总体优于三角形轨道;最优方案是采用准静态浮空平台,次优方案是采用半径较小的圆形轨道,或边长较小的三角形轨道,同时单个轨道上布设一个HALE-UAV。
空中骨干网;覆盖;空中走廊;高空长航时无人机;圆柱体
1 引言
在未来战争中,为了满足指控中心与各种作战单元之间的信息通信需求,战场无线通信网络必须具有高速率、大容量、超视距、无缝覆盖、实时接入的信息传输能力。空中骨干网是一个利用长滞空平台组网构建的大尺度、高速率、超视距通信覆盖的网络,为视距内和视距外的陆、海、空各种作战单元提供接入、转发和路由功能,可满足战场上各类业务信息的实时性传输需求[1-2],它不需要依靠网络基础设施,采用移动ad hoc网络的组网方式,根据作战任务临时布设,具备自组织、自修复的能力和快速机动、灵活高效组网的优势。近年来,美军致力于该领域的研究和建设,开展了联合空中层网络(JALN, joint aerial layered network)[3]、战场空中通信节点(BACN, battlefield airborne communications node)[4]、机载战术网络(ATN, airborne tactical network)[5]等项目计划。
覆盖算法是空中骨干网的一个基础性研究问题。如何利用高空长航时无人机(HALE-UAV, high-altitude long-durance unmanned aerial vehicle)等长滞空平台的规律运动对有待覆盖空域进行稳定可靠的无缝覆盖具有较高的研究价值。近年来,无线传感器网络(WSN, wireless sensor network)的覆盖控制问题已引起了研究人员的广泛关注[6-8]。其中,水声传感器网络(UWSN, underwater sensor network)等三维WSN[9-11],以及涉及移动节点的WSN的覆盖问题也是研究热点问题[12-15]。但这些研究成果对空中骨干网覆盖问题的参考价值较少,该问题的挑战性在于如何通过对基于某种运动方式的节点进行合理而高效的布设,从而实现对三维空间的完全覆盖。文献[16]针对多无人机传感器网络覆盖问题,提出了基于势博弈与log-linear学习的分布式最优传感器配置方法,但该方法并不适用于空中骨干网中规律运动的HALE-UAV。文献[17]针对圆形轨道上运动的HALE-UAV研究了空中骨干网的覆盖优化问题,但缺少对其他运动轨道的分析。此外目前还鲜有其他公开发表的研究成果。
本文针对空中骨干网覆盖问题,考虑了HALE-UAV的两种典型的运动轨道——圆形和三角形轨道,并采用最优化理论比较了两种覆盖策略,得出了完全覆盖的最优方案。研究结果对空中骨干网的设计具有一定的参考价值。
2 网络模型及问题描述
本文设计的空中骨干网将预先布设的HALE-UAV作为骨干节点,通过骨干节点实现地面、海上、空中各种作战单元的实时接入,其网络架构如图1所示。图1中,虚线部分为有待覆盖的空中走廊(AC, air corridor),各HALE-UAV布设于AC的上方,对AC进行通信覆盖。AC可建模为一定数量的长方体集合,如图2所示。为了保证AC内飞机信息传输的实时性和可靠性以及资源利用的有效性,本文需要研究的问题是如何基于HALE-UAV特定的运动方式对一定体积的AC进行完整且高效的覆盖,即覆盖问题的目标是利用最少量的HALE-UAV为AC提供完全覆盖。
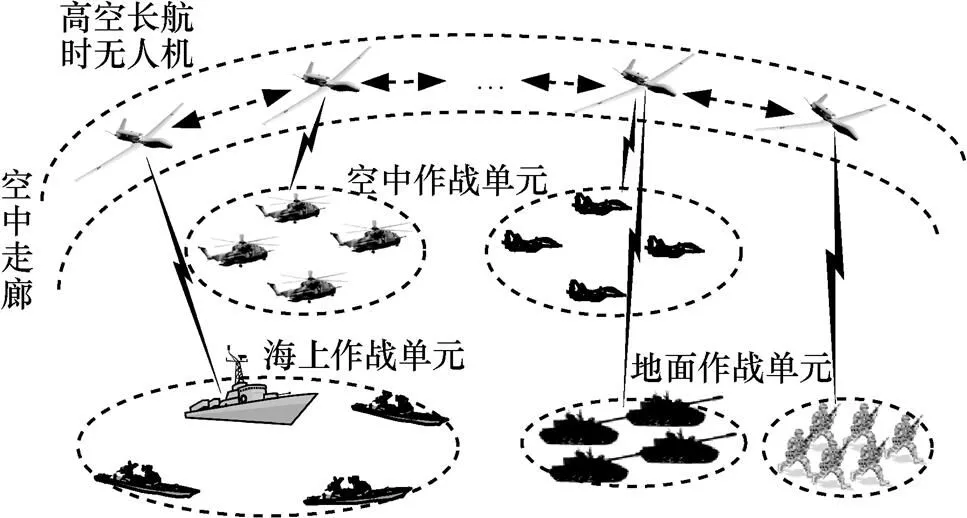
图1 空中骨干网网络架构示意
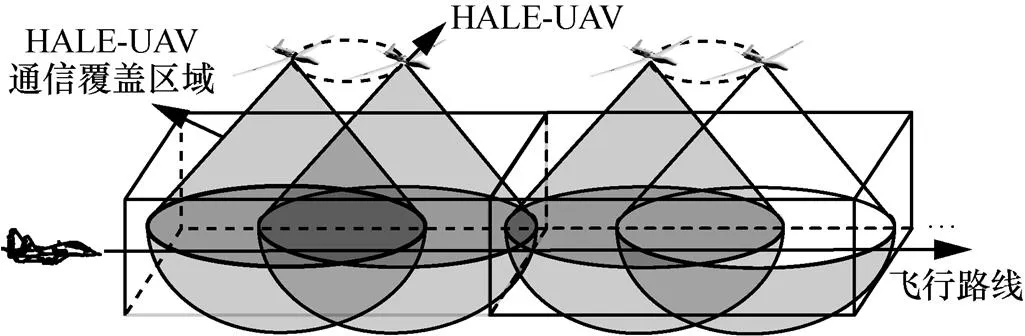
图2 HALE-UAV对AC的覆盖示意

3 圆形、三角形轨道几何分析
3.1 圆形轨道
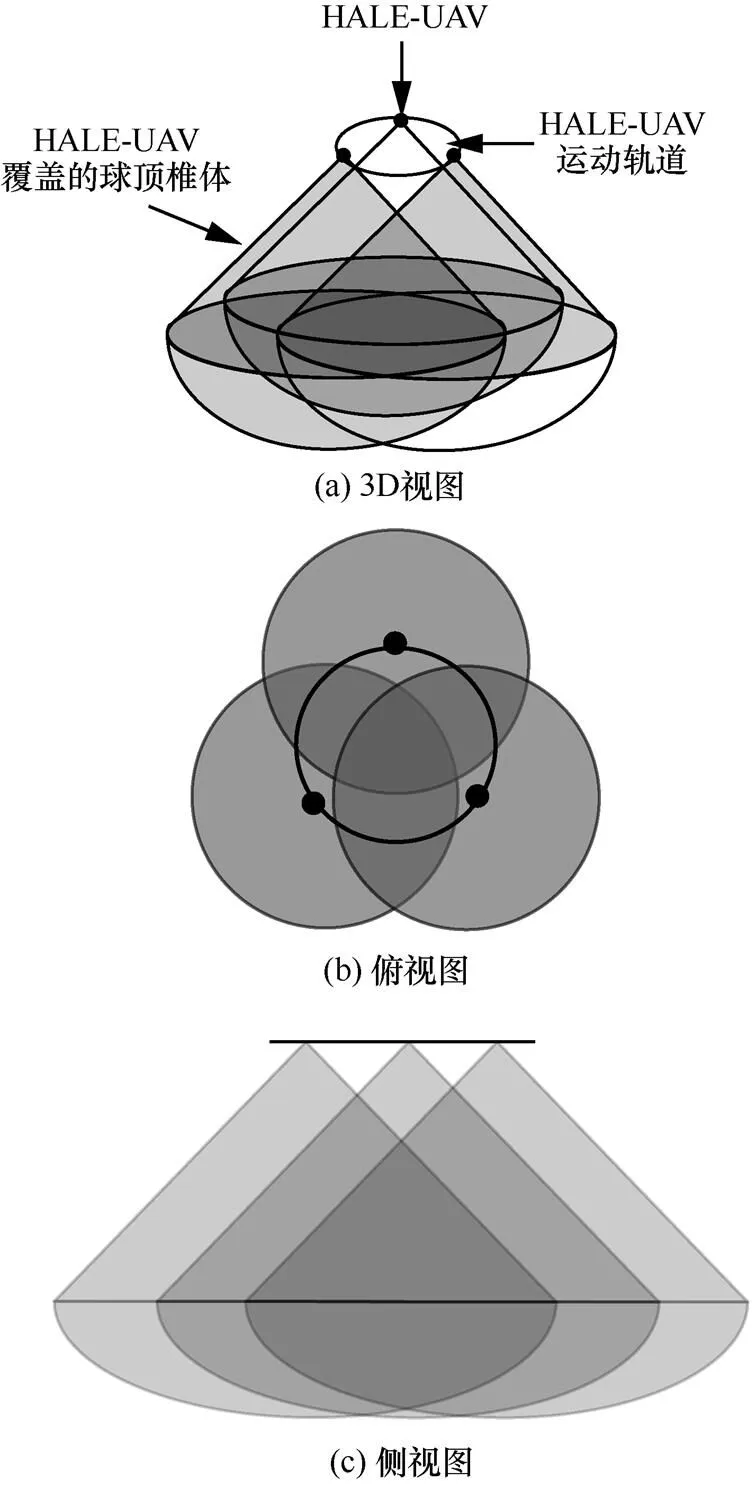
图3 圆形轨道上3个HALE-UAV的覆盖效果
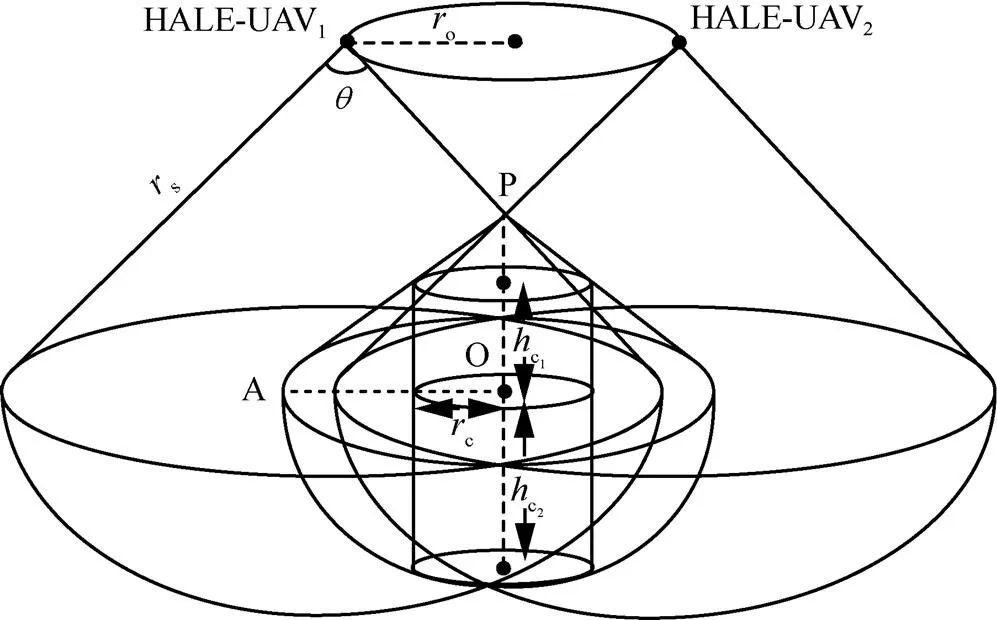
图4 圆形轨道上两个HALE-UAV提取出的圆柱体
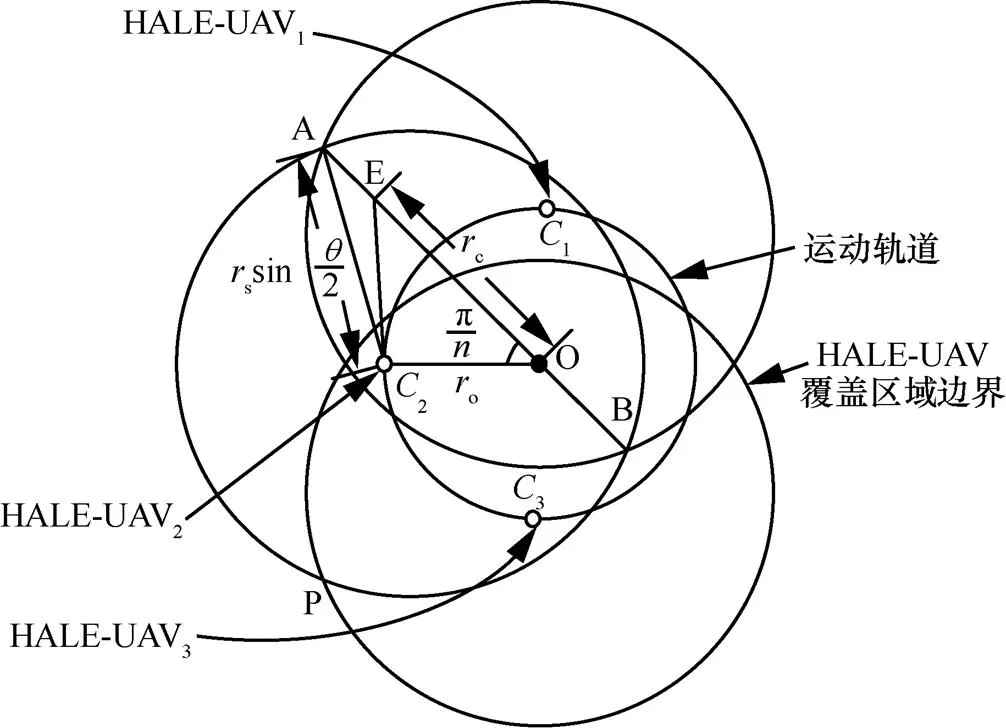
图5 圆形轨道上3个连续HALE-UAV的俯视图

如图4所示,易知
3.2 三角形轨道
在三角形轨道中,由于转弯拐角弧度相对于轨道边长较小,可忽略不计,因此可近似为等边三角形,记其边长为。与圆形轨道不同,三角形轨道的覆盖需要根据单个轨道上节点的数量分情况讨论。
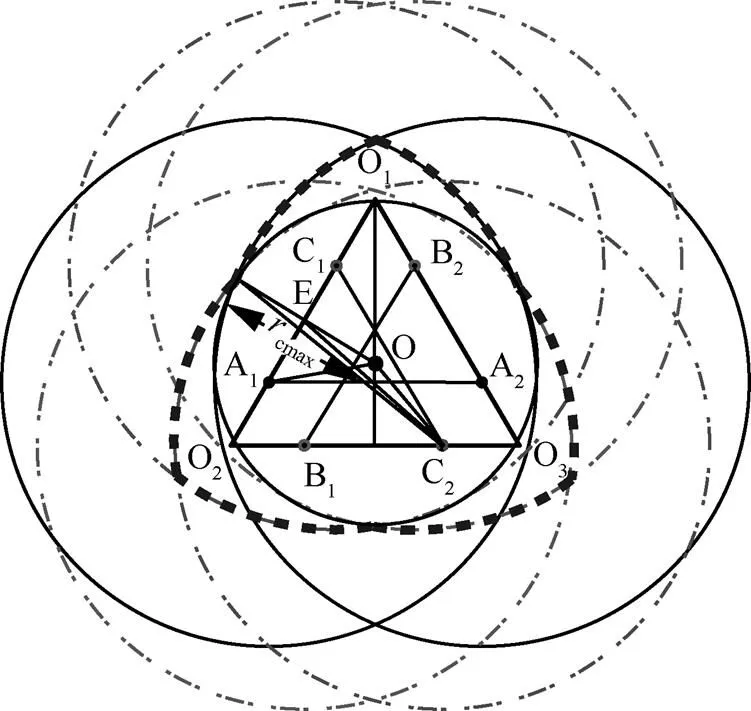
图7 三角形轨道时的俯视图
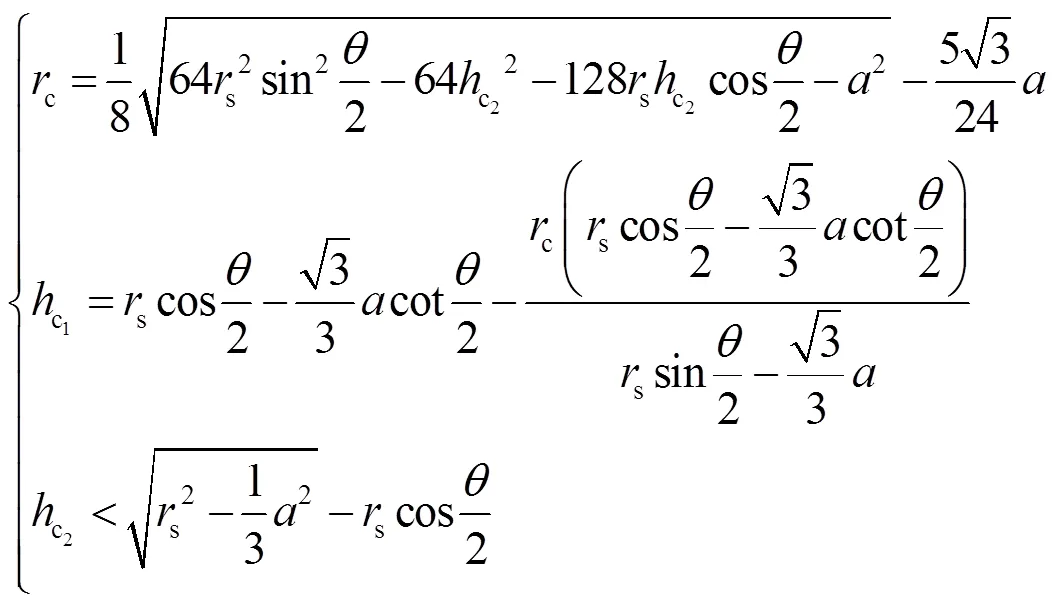
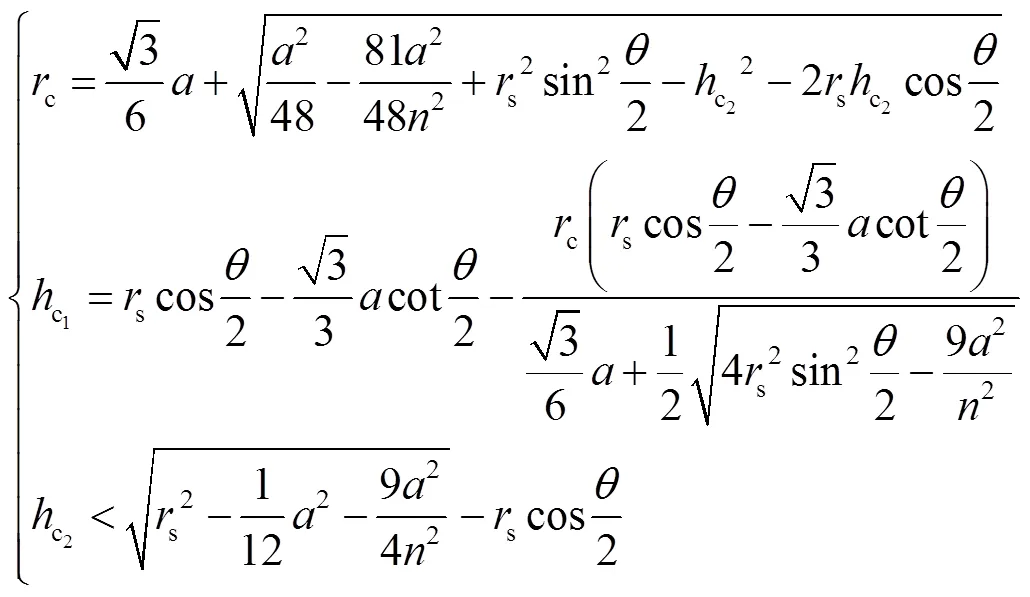
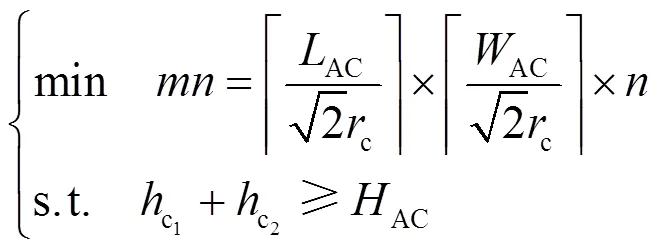
4 覆盖问题解决方案

由式(12)和式(13)可得

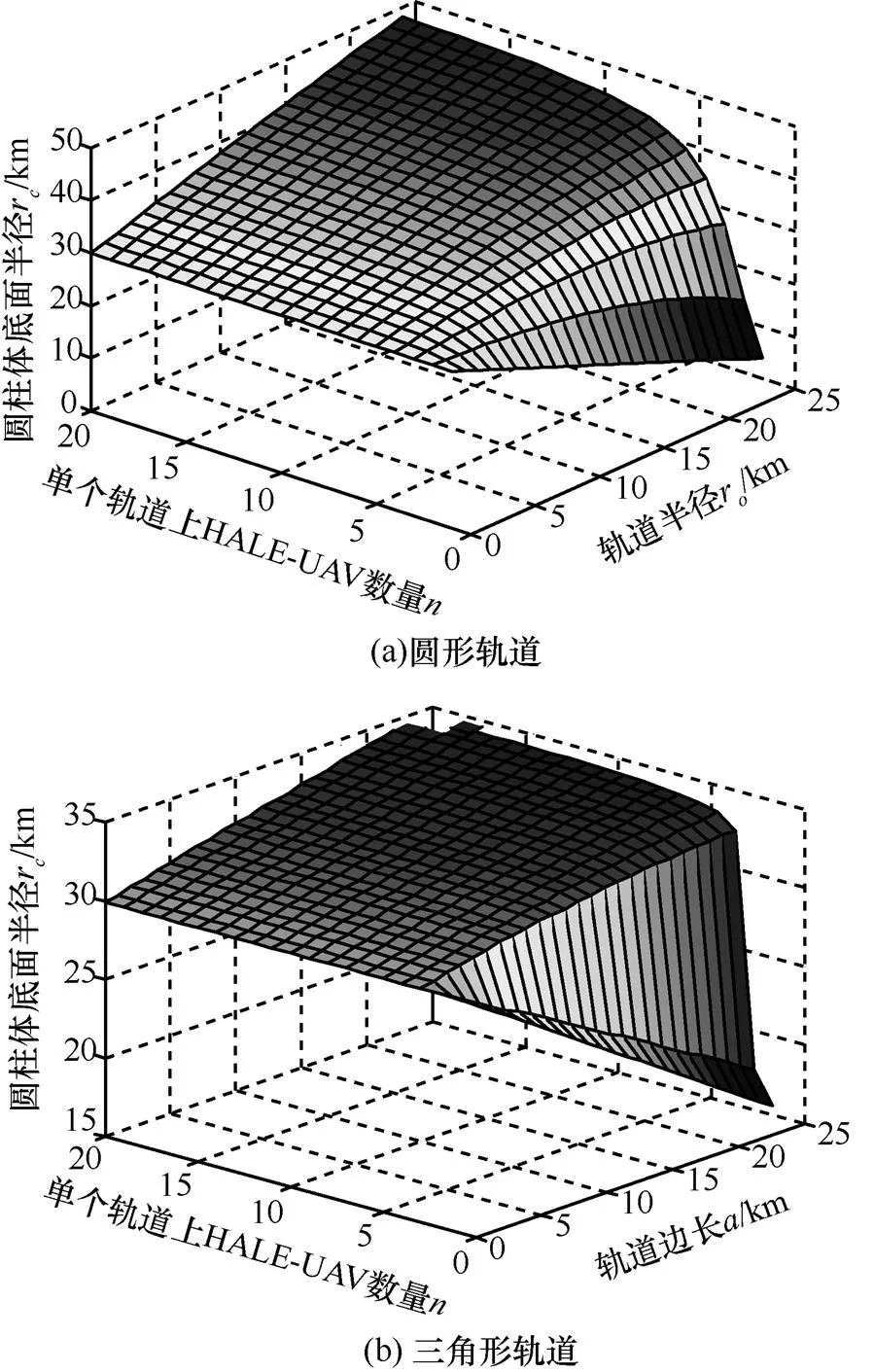
图10 所截取圆柱体的底面半径rc与其他变量的关系
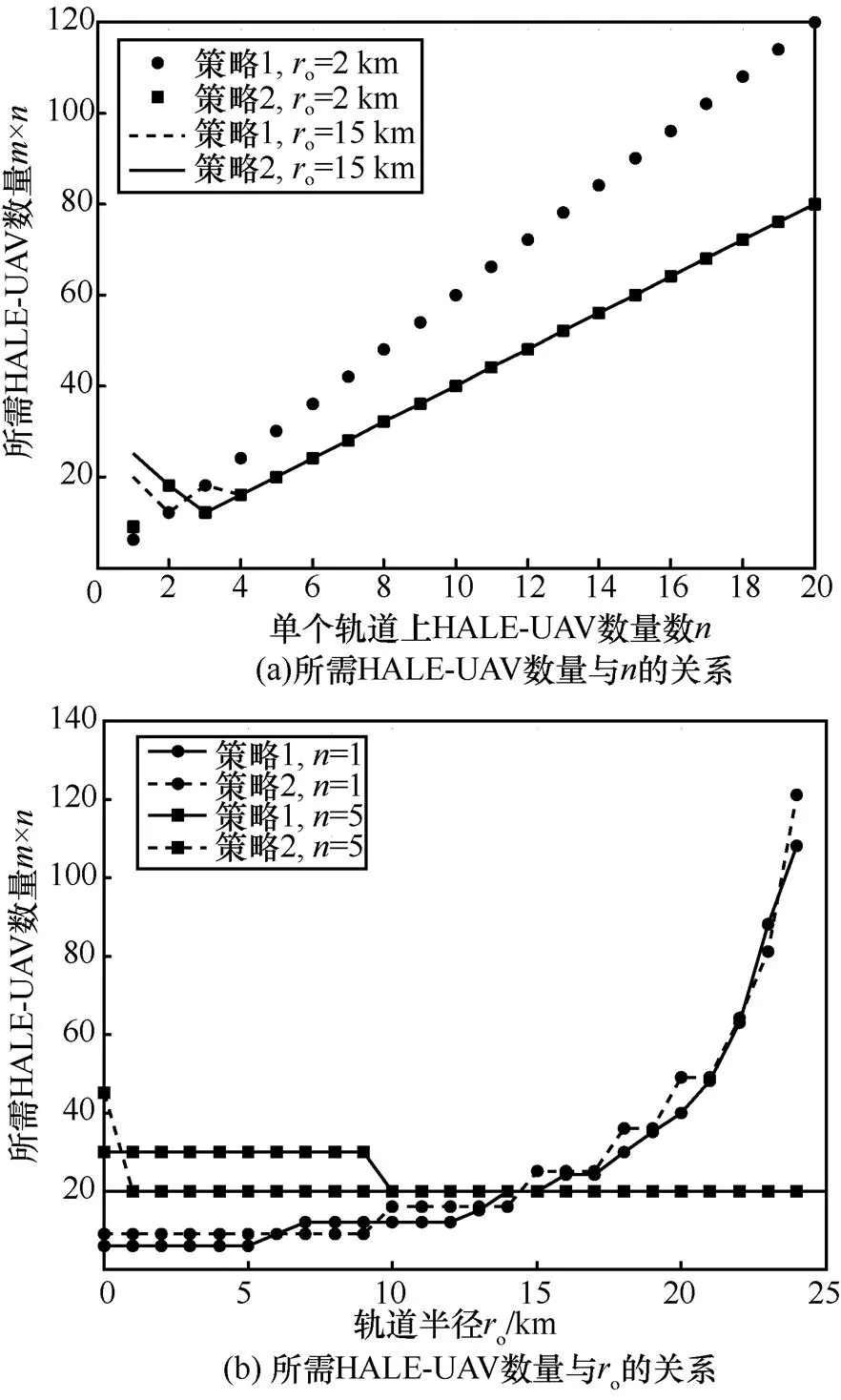
图11 圆形轨道中策略1、策略2所需HALE-UAV数量的比较
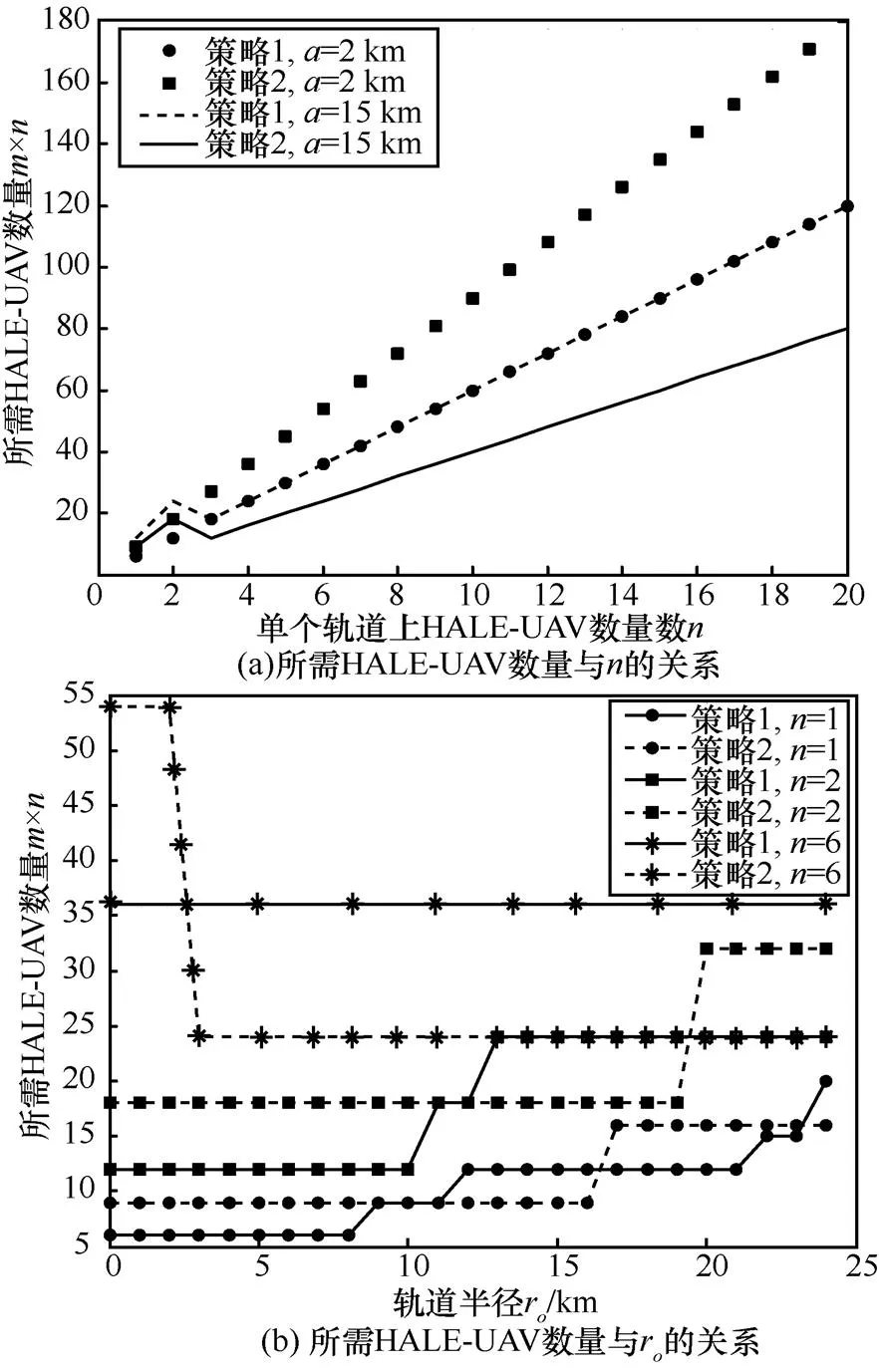
图12 三角形轨道中策略1、策略2所需HALE-UAV数量的比较
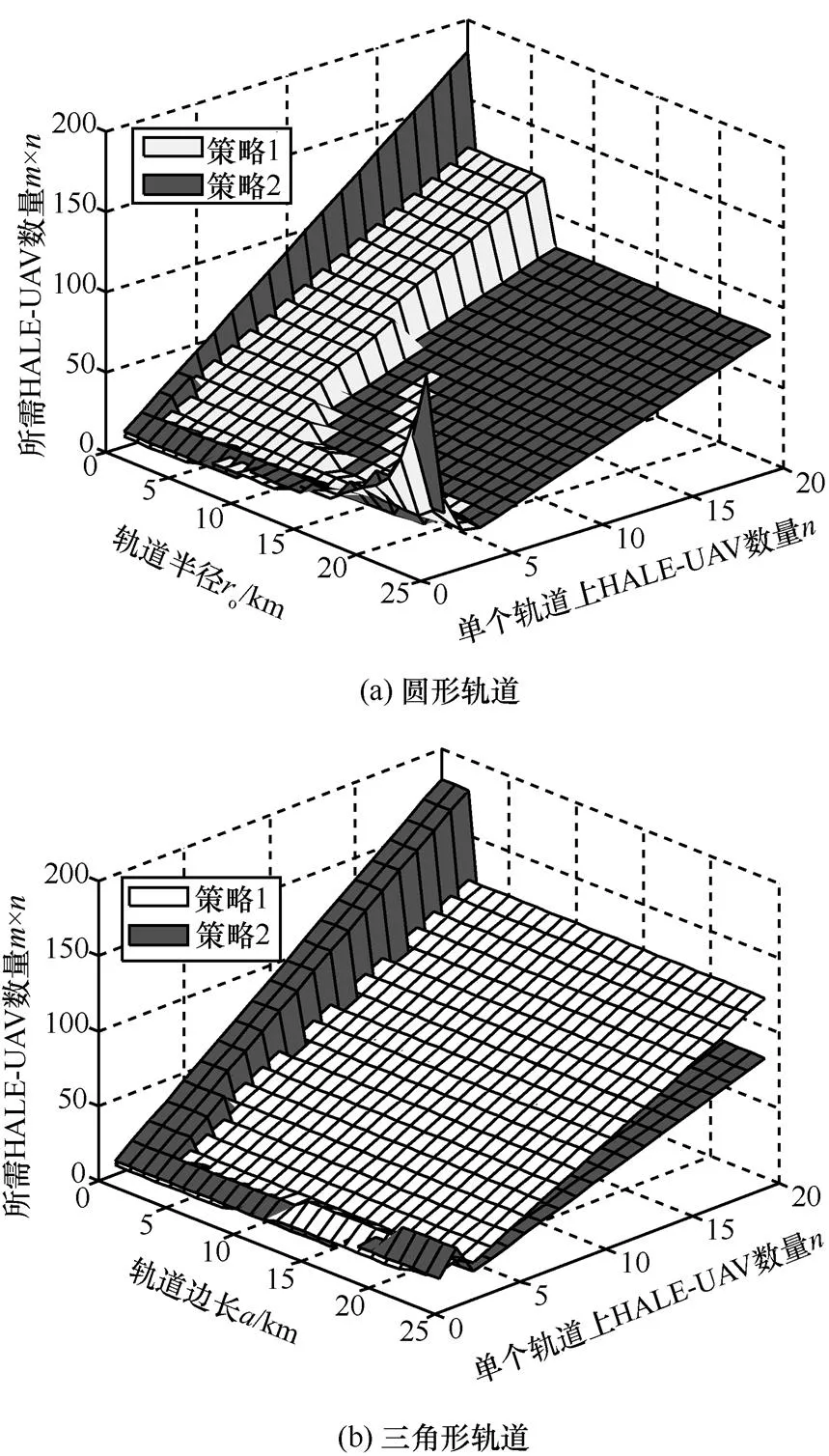
图13 策略1、策略2所需HALE-UAV的数量与其他变量的关系
5 结束语
本文对空中骨干网覆盖策略进行了研究。针对具有长方体形状的AC,本文的覆盖方案是将沿轨道规律运动的HALE-UAV的不变覆盖区域作为基础构件来填充AC,目标是利用最少量的HALE-UAV为AC提供完全覆盖。针对圆形、三角形两种运动轨道和策略1、策略2两种覆盖策略,采用几何理论、最优化理论得出了最优覆盖方案。研究结果表明,圆形轨道总体优于三角形轨道;最优覆盖方案是采用准静态浮空平台,次优覆盖方案是采用半径较小的圆形轨道,或边长较小的三角形轨道,同时单个轨道上布设一个HALE-UAV。
[1] CHENG B N, CHARLAND R, CHRISTENSEN P, et al. Evaluation of a multihop airborne IP backbone with heterogeneous radio technologies[J]. IEEE Transactions on Mobile Computing, 2014, 13(2): 299-310.
[2] WANG J, SHAKE T, DEUTSCH P, et al. Topology management algorithms for large-scale aerial high capacity directional networks[C]// IEEE Military Communications Conference. 2016: 343-348.
[3] SCHUG T, DEE C, HARSHMAN N, et al. Air force aerial layer networking transformation initiatives[C]//IEEE Military Communications Conference. 2012: 1974-1978.
[4] BURNS K, SMITH K. Battlefield airborne communications node (BACN) realizing the vision of the aerial layered network (ALN)[C]//AIAA SciTech. 2016: 1-20.
[5] CHENG B N, BLOCK F J, HAMILTON B R, et al. Design considerations for next-generation airborne tactical networks[J]. IEEE Communications Magazine, 2014, 52(5): 138-145.
[6] SANGWAN A, SINGH R P. Survey on coverage problems in wireless sensor networks[J]. Wireless Personal Communications, 2015, 80(4): 1475-1500.
[7] BENATIA M A, SAHNOUN M, BAUDRY D. Multi-objective WSN deployment using genetic algorithms under cost, coverage, and connectivity constraints[J]. Wireless Personal Communications, 2017, 94(4): 2739-2768.
[8] PANANJADY A, BAGARIA V K, VAZE R. Optimally approximating the coverage lifetime of wireless sensor networks[J]. IEEE-ACM Transactions on Networking, 2017, 25(1): 98-111.
[9] WATFA M K, COMMURI S. The three-dimensional wireless sensor network coverage problem[C]//IEEE International Conference on Networking, Sensing and Control. 2006: 856-861.
[10] ALAM S M N, HAAS Z J. Coverage and connectivity in three-dimensional networks with random node deployment[J]. Ad Hoc Networks, 2015, 34(C): 157-169.
[11] VIEIRA L F M, ALMIRON M G, LOUREIRO A A F. Link probability, node degree and coverage in three-dimensional networks[J]. Ad Hoc Networks, 2016, 37(P2): 153-159.
[12] WANG B, LIM H B, MA D. A survey of movement strategies for improving network coverage in wireless sensor networks[J]. Computer Communications, 2009, 32(13-14): 1427-1436.
[13] ROUT M, ROY R. Self-deployment of mobile sensors to achieve target coverage in the presence of obstacles[J]. IEEE Sensors Journal, 2016, 16(14): 5837-5842.
[14] LIU B Y, DOUSSE O, NAIN P, et al. Dynamic coverage of mobile sensor networks[J]. IEEE Transactions on Parallel and Distributed Systems, 2013, 24(2): 301-311.
[15] 王良民, 李菲, 秦颖. 基于移动节点的无线传感器网络覆盖洞修复方法[J]. 通信学报, 2011, 32(4): 1-8.
WANG L M, LI F, QIN Y. Resilient method for recovering coverage holes of wireless sensor networks by using mobile nodes[J]. Journal on Communications, 2011, 32(4): 1-8.
[16] 孙昌浩, 段海滨. 基于进化势博弈的多无人机传感器网络K-覆盖[J].中国科学: 技术科学, 2016, 46(10): 1016-1023.
SUN C H, DUAN H B. An evolutionary potential game theoretic approach for the K-COVER problem in multi-UAV sensor networks[J]. Sci Sin Tech, 2016, 46(10): 1016-1023.
[17] SEN A, GHOSH P, SILVA T, et al. Architecture and algorithms for an airborne network[J]. Computer Science, 2010: 1-14.
Coverage in airborne backbone network
ZHENG Bo1,2, ZHANG Hengyang1, LI Yong2, CHENG Wei2
1. Information and Navigation Institute, Air Force Engineering University, Xi’an 710077, China 2. College of Electronics and Information, Northwestern Polytechnical University, Xi’an 710129, China
The high-altitude long-durance unmanned aerial vehicle (HALE-UAV) equipped with directional antenna and the cuboid-shaped air corridor (AC) were taken as the study objects, and the basic idea was to extract the invariant coverage area of moving spherical cones, cylinder, as the basic component to fill AC. The general goal was to employ HALE-UAV as few as possible under the condition that the height of the cylinder was larger than that of AC. The circular and triangular orbitsof HALE-UAV were analyzed in geometry respectively, and the mathematical expressions of the radius and height of the cylinder were derived. Then two coverage schemes were introduced. Through comparing the two schemes by optimization theory, the optimal coverage strategy was derived. Results show that the circular orbit is better than the triangular orbit. Moreover, the optimal solution is to employ the quasi-static floating platforms, and the suboptimal is to adopt the circular orbit of a small radius, or the triangular orbit of a small side, with a HALE-UAV on an orbit.
airborne backbone network, coverage, air corridor, high-altitude long-durance unmanned aerial vehicle, cylinder
TP393
A
10.11959/j.issn.1000-436x.2018226
郑博(1982–),男,陕西咸阳人,博士,空军工程大学讲师,西北工业大学电子信息学院博士后,主要研究方向为无线自组网、机载通信网、空中骨干网等。

张衡阳(1978–),男,湖南祁东人,博士,空军工程大学副教授、硕士生导师,主要研究方向为无线自组网、无线传感器网络、航空数据链、机载通信网等。
李勇(1962–),男,陕西西安人,博士,西北工业大学教授、博士生导师,主要研究方向为认知无线电、软件无线电、实时数字信号处理及其应用、雷达信号处理等。

程伟(1980–),男,陕西志丹人,博士,西北工业大学副教授、硕士生导师,主要研究方向为无线自组网、无线传感器网络、认知无线网络、物联网等。
2017−12−18;
2018−10−31
航空科学基金资助项目(No.20161996010, No.20150896010)
The Aeronautical Science Foundation of China (No. 20161996010, No.20150896010)
猜你喜欢
铁道通信信号(2020年4期)2020-09-21
铁道通信信号(2020年3期)2020-09-21
空间科学学报(2020年6期)2020-07-21
空间科学学报(2020年6期)2020-01-08
环球时报(2019-12-05)2019-12-05
广东第二课堂·小学(2017年9期)2017-09-28
儿童故事画报·发现号趣味百科(2016年7期)2017-02-08
小雪花·成长指南(2016年11期)2016-12-07
数学大王·低年级(2016年1期)2016-09-10
中国交通信息化(2015年10期)2015-06-06
